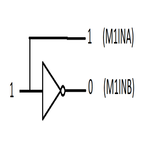
Motor Control Interface
By Jose Alcantar, Electronics and Controls Engineer Introduction: To drive the six motors independently as per requirement, 3 dual motor drivers are being utilized. Three VNH5019 motor drivers will be used to control each motor along with a PCA96805 I/O expander and a hex inverter. VNH5019: The VNH5019 dual motor driver requires three pins to […]

Current Sensors Experiment
Current Sensing Experiment: Purpose: Measuring motor draw current on current sensing pins via the VNH5019 to identify no load conditions and determine no-load threshold to shut off motors. The VNH5019 provides two current pins to the user, which can be used to measure the instantaneous current absorption by each H-Bridge. Procedure: While running a motor […]
Digital Slip Differential Voltage Ratio
By: Jose Alcantar, Electronics and Controls Engineer Speed Ratio Calculation for slip differential Purpose: To implement slip differential turning, the speed ratio for the left and right set of wheels needs to be calculated. Further testing needs to be done to find a comfortable speed for the left and right wheels. Procedure: To determine the […]
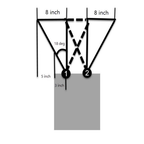
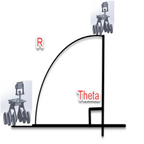
Ultrasonic Sensors – Field of View
By: Jose Alcantar, Electronics and Controls Engineer HC-SR04 Experiment Data Sheet Values: Max Range: 4m Min range: 2cm Measuring angle: 15 degrees Purpose: Testing the field of view on the HC-SR04 to find a suitable mounting position for the two ultrasonic sensors along the front of the rover. Procedure: An object was placed in front […]
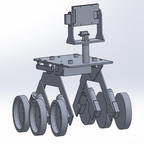
System Mechanical Design
By: Nick Lukin (Design and Manufacturing Engineer) Table of Contents Introduction Figure 1: Overall Mechanical Design The mechanical design of the Pathfinder utilizes many parts and sub-assemblies in order to achieve all the requirements associated with the overall design. In order to achieve the level 1 requirement of being able to successfully traverse a pre-determined […]

Sensors for no load condition Trade-Off Study
By Jose Alcantar, Electronics and Controls A set of different types of sensors were considered for detecting no load conditions on the Pathfinder, these include: Current Sensors: These type of sensors allow the user to monitor the current draw on each of the motors. Flex Sensors: This type of sensor measures the deflection caused by […]

Motor Shields Trade-Off Study
By: Nick Lukin (Manufacturing and Design Engineer) Two motor driver shields were taken into consideration for the Pathfinder Project, the Pololu VNH 5019 and the Adafruit V2.3. Each shield had its own pros and cons and there were a variety of factors that needed to be taken into consideration during the evaluation process. The figure […]

Preliminary Project Plan
Sabina Subedi (Project Manager) Adan Rodriguez (Mission, Systems & Test) Jose Alcantar (Electronics & Controls) Nick Lukin (Design & Manufacturing) Table of Contents Work Breakdown Structure (WBS) By Sabina Subedi (Project Manager) The WBS shows all the work that is to be completed by the Pathfinder – Chassis group. The WBS is arranged into three main […]

Fall 2016, Preliminary Design Documentation
Sabina Subedi – Project Manager Adan Rodriguez – Mission, Systems and Test Jose Alcantar – Electronics and Controls Nicholas Lukin – Design and Manufacturing Table of Contents Review of Literature By Sabina Subedi, Project Manager Level 1 requirements for the Pathfinder from Spring 2016 were reviewed and analyzed per the requirement evaluation rubric provided below. […]