
Preliminary Documentation: Sojourner
Fall 2017
Team Sojourner:
Daniel Yeldell (Project Manager)
Andrew Yi (Missions, Systems, and Test)
Zack Oyog (Electronics and Control)
Malak Alamad (Design and Manufacturing)
Table of Contents:
Preliminary Design Document:
I. Program Objectives/Mission Profile
II. Requirements
A. Program/Project
B. System/Subsystem
III. Design Innovation
IV. Systems/Subsystem Design
A. Product Breakdown Structure
B. Electronic System Design
1. System Block Diagram(s)
2. Interface Definitions
V. Mechanical Design
VI. Design and Unique Task Descriptions
Preliminary Design Documentation
Program Objectives/ Missions Profile
By Daniel Yeldell (Project Manager)
Program Objectives
The Program Objectives is a statement of the customer’s vision of the features and general capabilities of the Sojourner.
Program Objectives
By Daniel Yeldell (Project Manager)
The Sojourner is a 6 wheeled rover that is capable of autonomous travel on a Mars-like environment. For the mission a Mars-like world is defined to be a rocky surface that can reach the higher peaks of the temperature of Mars. To travel over this terrain, its mechanical system will utilize a “rocker bogie” suspension system and a differential gearbox. The rover will be powered by a battery/solar-panel charging module. A single operator will be able to control the robot in its mission and view the mission .
Mission Profile
The Program Objectives is a statement of the customer’s intended application of the Sojourner rover.
Mission Profile
By Daniel Yeldell (Project Manager)
The Sojourner mission for Fall 2017 is to travel through a maze as defined by the customer. This maze will be a 2D print with green lines to represent a maze hallway, and a black grid as guide markings for the rover to follow. The goal of the mission is for the rover to be able to take two different trips through the maze: one with remote assistance, and a second autonomous trip. The rover will be capable of making the autonomous trip through the maze simultaneously with other robots.
The estimated length of the final mission will be under 2 hours, but the length of each trip should be no more than 15 minutes. The rover will use the ArxRobot application to both provide control and video support to the operator.
Requirements
By Daniel Yeldell (Project Manager) and Andrew Yi (Missions, Systems, and Test)
Level 1 Requirements
The “Level 1 Requirements” list is a set of top-level requirements, and is our representation for the customer’s general requirements for the mission.
Level 1 Requirements
Program Requirements:
As Defined by Project and Mission Objectives Document(http://web.csulb.edu/~hill/ee400d/Project%20and%20Mission%20Objectives.pdf)
L1 – 1 The Sojourner shall be completed by Wednesday, December 13, 2017.
L1 – 2 The Sojourner will be controlled by a 3Dot board.
L1 – 3 The Sojourner will use 6 wheels with a Rocker boogie suspension system utilizing a differential gearbox.
L1 – 4 The sojourner shall navigate a maze with “video support” from the Arxterra Control Panel with the ArxRobot Android or iPhone application.
L1 – 5 The Sojourner will use a solar panel as a part of its power system.
L1 – 6 The Sojourner should be modular, able to be assembled within 20 minutes.
L1 – 7 The Sojourner shall be able to navigate a multi-colored maze autonomously.
L1 – 8 The Sojourner is to be a scaled down version of the Pathfinder rover.
L1 -9 All robot 3D printed components must be able to be printed in a total of 6 hours, with no part taking more than 2 hours to print.
As defined in customer meeting:
L1 – 10 The Sojourner shall cost less than $250.
L1 – 11 The Sojourner should be able to travel on a Mars-like environment.
Project Requirements:
L1 – 12 The Sojourner will use the solar panel to recharge the battery.
L1 – 13 The Sojourner will fit within the halls of the maze.
L1 – 14 The Sojourner should have a sleep/standby mode for power conservation.
L1 – 15 The Sojourner should take action when another bot is detected.
Level 2 Requirements
The “Level 2 Requirements” list is a set of requirements that represent the team’s engineering goal for the mission. These requirements stem from the “Level 1 Requirements”, but focus on the technical details such as product size and the functionality of components.
Level 2 Requirements
By Andrew Yi (Missions, Systems, and Test)
L2- 1 The Sojourner shall use the ultrasonic sensors to detect other objects 1.5 feet in front of the Sojourner. (See L1-11)
L2-2 The Sojourner shall have an area for a smartphone to be placed onto it. The phone shall have a periscope attachment on its camera and will provide live feed video via the Arxterra App. (See L1-4)
L2-3 The Sojourner will use 6 identical wheels for movement, with each wheel having its own motor. (See L1-3)
L2-4 The Sojourner shall navigate a maze autonomously after it has cleared the maze with user input. The autonomous route shall follow the original route without user input. (See L1-7)
L2-5 The Sojourner will have a solar panel attached to the chassis. The solar panels will have no other components covering it for full sunlight acquisition. (See L1-5)
L2-6 The Sojourner should have a sleep mode which is activated after 40 minutes of non operation. (See L1-6)
L2-7 The Sojourner should have 2 separate sections incorporating the modular design. The chassis, motor, wheels, 3Dot board, and H-bridge should be in 1 module, while the solar panels and phone holder should make up the 2nd module. Assembling all modules together should take a maximum of 20 minutes. (See L1-9)
L2-8 The Sojourner should have cleated wheels, which assist in traversing terrain with soft sand and rocks. This allows for mobility in an environment similar to Mars. (See L1-8)
L2-9 The Sojourner shall use 2 color sensors to detect the walls within the maze so that it can keep itself within the confines of the hallways. (See L1-7)
L2-10 The Sojourner shall have dimensions of 8.4cm (L) x 3.8cm (W) x 3.4cm (H) so that it can fit within the dimensions of the hallways (7.62cm x 7.62cm). (See L1-13)
L2-11 The Sojourner shall use 2 infrared sensors to detect the black lines indicating intersections in the maze. (See L1-7)
L2-12 The Sojourner shall cease all motor functions when another robot is detected and resume normal operations once the other robot has left the detection zone. (See L1-11)
L2-13 The Sojourner’s solar panel will be used to recharge the 3.6V RCR123A battery on the 3Dot board. (See L1-5).
L2-14 The Sojourner should go into low power mode after hitting sleep mode, conserving its energy for mission critical tasks. (See L1-6)
Design Innovation
By Team Sojourner
Creativity Workshop
In a creativity workshop, our team attempted to address the question,
“How can the movement of the rover be improved over the previous model?”
Brainstorming Exercise
We used various brainstorming methods (Dunker Diagrams, Lateral Thinking, Question/Experiment) and identified the following ideas as potential requirements for the rover:
- Obstacle detection – (Dunker Diagram)
- Increased rover stability – (Lateral Thinking)
- A fail-safe operation – (Lateral Thinking)
- Additional power requirements -(Question/Experiment)
Of these topics, we decided on making obstacle detection a full requirement for our rover. In the upcoming weeks, we will be exploring the other topics through further discussion.
System/Subsystem Design
By Daniel Yeldell (Project Manager) and Andrew Yi (Missions, Systems, and Test) and Zack Oyog (Electronics and Control)
Product Breakdown Structure
By Daniel Yeldell (Project Manager) and Andrew Yi (Missions, Systems, and Test)
The Sojourner is broken into 5 categories within the Product Breakdown Structure (PBS). The solar panel, recharging module, and battery will provide power to the Sojourner and all of its peripherals. The sensors will be used to detect colored walls within the maze and to recognize other robots within range. Visual pertains to the user being able to view live video feed from a periscope attachment on a smartphone. The 6 wheels, 6 motors, and Rocker-Bogie suspension system make up the mobile part of the Sojourner. Bluetooth and the Arxterra mobile app will allow the user to control the Sojourner through a mobile terminal.
PBS Chart

Electronic System Design
By Andrew Yi (Missions, Systems, and Test) and Zack Oyog (Electronics and Control)
System Block Diagram:
By Andrew Yi (Missions, Systems, and Test)
The System Block Diagram visually shows how certain components of a system are connected. The arrows define the direction of data (receive/transmit), with subsystems such as the Arxterra app being able to receive and transmit data. The color sensors will be used to detect the walls within the maze, while the ultrasonic sensors detect other robots within proximity. An I2C port expander from the 3DoT board will be required to power the color and ultrasonic sensors.
System Block Diagram

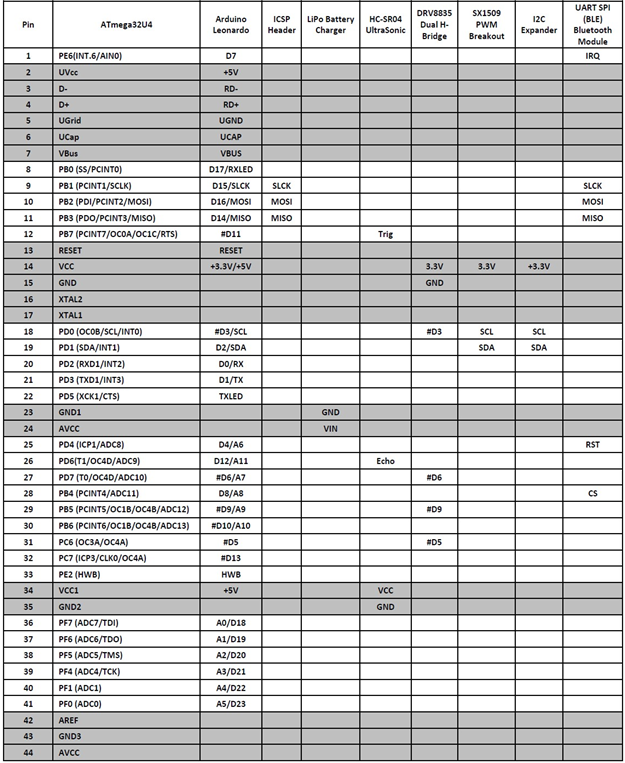
Interface Definitions:
By Andrew Yi (Missions, Systems, and Test) and Zack Oyog (Electronics and Control)
Interface Definition Chart
Fritzing Diagram

Mechanical Design
By Malak Alamad
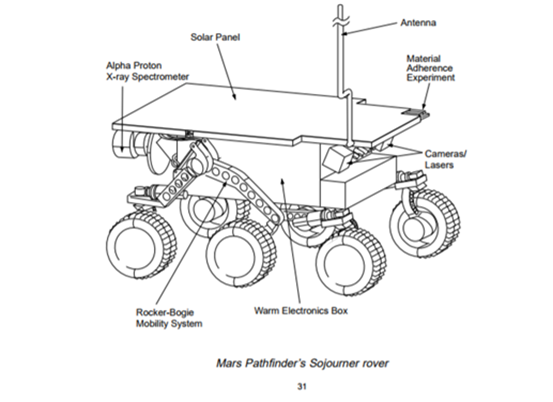
View of System
By Malak Alamad
The small-scale design of the Sojourner mini pathfinder will be similar to the actual Sojourner rover that landed on Mars in 1997. The rover’s mission was to collect scientific data about the planet, including chemical, atmospheric, and other data measurements.
NASA’s Pathfinder Rover
Design Considerations
By Malak Alamad
The mini pathfinder that will be designed for this project will be required to autonomously find its way through a maze. It will be a simplified version of the original rover, while still maintaining its general design.
Design Considerations
The model for the Sojourner mini pathfinder will be a six-wheeled rover, controlled by a 3Dot microprocessor board. The dimensions will be 8.4cm (L) x 3.8cm (W) x 3.4cm (H), in order for it to fit through the hallways of the maze. The rover will be powered by solar panels that will charge a 3.6v RCR123A battery. This 6-wheel design will use a rocker-boogie suspension system, utilizing a differential gearbox, with motors in each cleated wheel. This design also allows for balance and stability and it allows for the rover to navigate across a Mars-like, rocky terrain. It will have a simple, lightweight chassis, with a modular design. The first module will contain the chassis, motor, wheels, 3Dot board, and the H-bridge. The second module will contain the solar panels and the phone holder. The sojourner will be designed in a manner that allows it to autonomously find its way through a maze without losing its way. This will be accomplished using code that is written in conjunction with the 3Dot microprocessor to allow for a video feed through a periscope attachment and remote control of the robot through the ArxRobot phone application. The rover will also have 3 color sensors to aid in its navigation through the maze’s hallways. The Sojourner will also be able to prevent itself from bumping into other robots through ultrasonic sensors that will detect other objects 1.5 feet away from it. If the rover is designed and assembled before the scheduled completion date, there will be time to install a standby/sleep mode, in order to conserve power, that will activate forty minutes after the rover ceases operation. The design and manufacturing of the rover will be complete by December 13th, 2017.
Design & Unique Task Descriptions
By Daniel Yeldell (Project Manager) and Andrew Yi (Missions, Systems, and Test)
Task Descriptions
By Daniel Yeldell (Project Manager)
The task description section lists tasks that the team members will be working on over the upcoming weeks.
Task Description
| Trade-off study for ultrasonic sensors | Zack | 09/27/17 | – | Scheduled |
| 3D Modeling Solution for Rapid Prototype | Malak | 09/27/17 | – | Scheduled |
| Researching Additional Requirements for Mission | Andrew | 09/27/17 | – | Scheduled |
Preliminary Project Plan
Table of Contents:
Preliminary Program Plan:
I. Work Breakdown Schedule
II. Product Schedule
A. Top Level Schedule
B. System/Subsystem Level Tasks
C. Burn Down and Project Percent Completion
III. System Resource Reports
IV. Project Cost Estimate
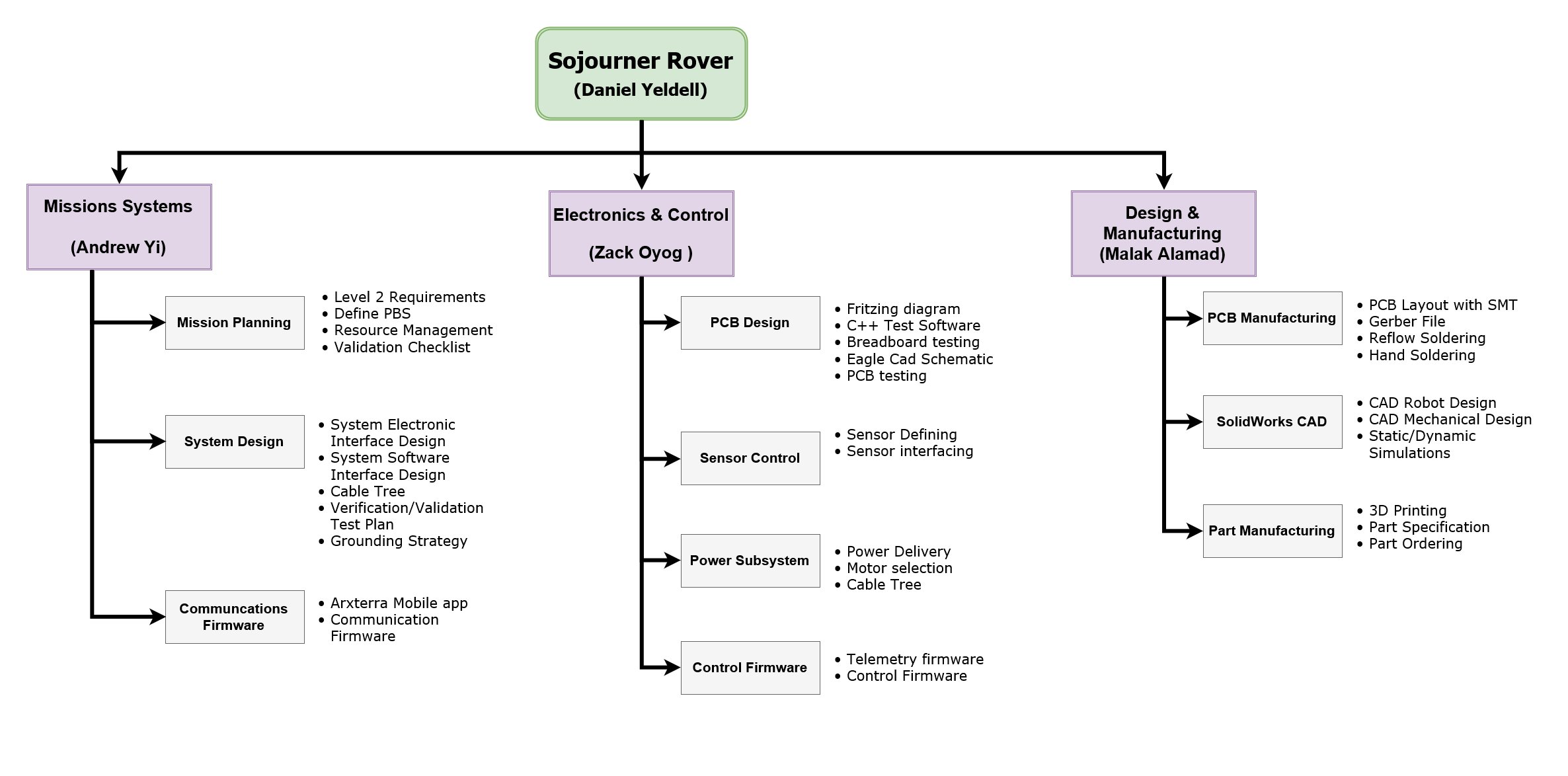
Work Breakdown Structure
By Daniel Yeldell (Project Manager)
The “Work Breakdown Structure” is a hierarchy chart that lists the allotted responsibilities of each team member.
WBS Chart
Project Schedule
By Daniel Yeldell (Project Manager)
The “Product Schedule” is composed of tabular and graphical representation of the team’s progress of the project. These schedules are based on the “Work Breakdown Schedule Chart” and “Task Descriptions” section from the Preliminary Design Document.
Top Level Schedule & System/Subsystem Level Tasks
Task Spreadsheet Part 1

Task Chart Part 1

Task Spreadsheet Part 2

Task Chart Part 2

Burn Down and Project Percent Completion
Burndown Chart

System Resource Reports
By Andrew Yi (Missions, Systems, and Test), Zack Oyog (Electronics and Control), and Daniel Yeldell (Project Manager)
The “System Resource Reports” document the quantifiable resources that relate to the engineering process.
Power Allocation Report
Power Allocation Report

Mass Allocation Report
Mass Allocation Report

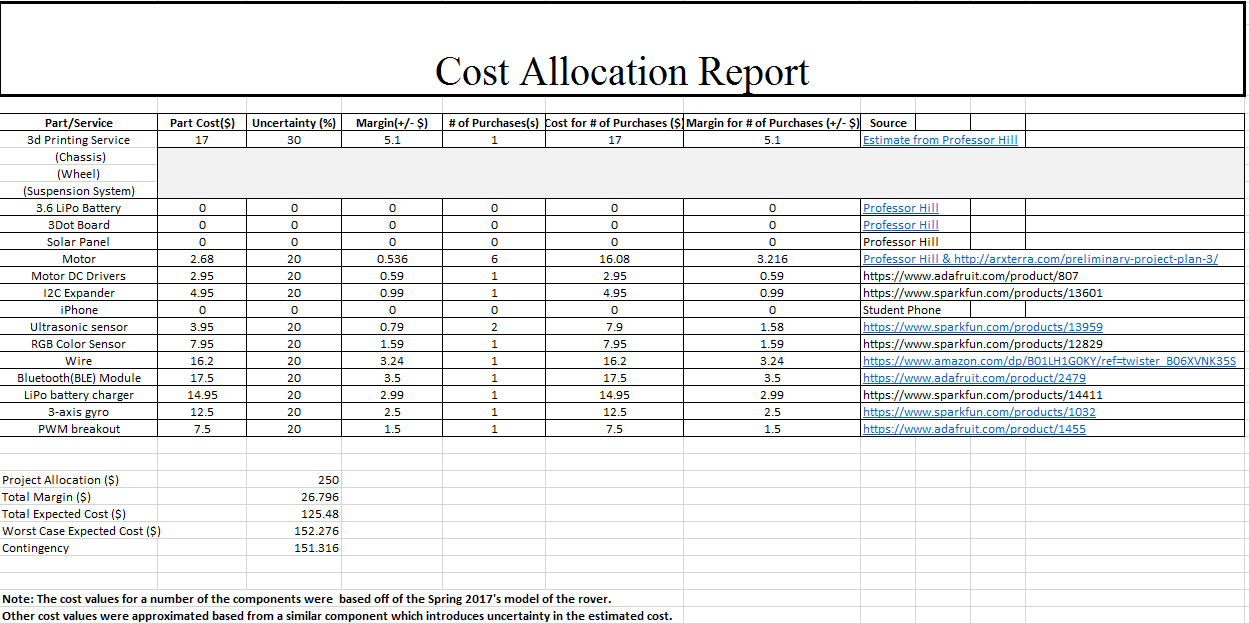
Product Cost Estimate
By Daniel Yeldell (Project Manager)
The “Product Cost Estimate” represents the preliminary estimate of the cost of the rover. This document was created as a percursor to a request for product funds from the customer.
Cost Allocation Report
Sources:
Preview Icon/ Blog Image: “Strata at Base of Mount Sharp “, NASA/JPL-Caltech
https://mars.nasa.gov/resources/7505/
Mechanical Design Section: Image
https://www.jpl.nasa.gov/news/press_kits/mpfland.pdf
http://arxterra.com/mini-pathfinder-spring-2017-preliminary-design-document/#Mechanical_Design