Spring 2017 Velociraptor: Range of Motion Prototype
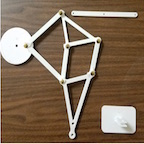
By: Andrea Lamore (Manufacturing) Approved By: Jesus Enriquez (Project Manager) Table of Contents Introduction The range of motion of the leg determines the type of step the robot will take. A static walk requires a different stride from a dynamic walk and it is important to pick the linkages in the leg according to the … Continue reading Spring 2017 Velociraptor: Range of Motion Prototype