By: Lucas Gutierrez (Project Manager)
Table of Contents
Project Overview
Team
Fall 2017 ModWheels:
Project Manager: Lucas Gutierrez
Mission, Systems, & Test Engineer: Andrew Yi
Electronics & Control Engineer: Matt Shellhammer
Design & Manufacturing Engineer: Natalie Arevalo
Summary
The Fall 2017 ModWheels toy car is a new project within The Robot Company. Its modular design comes from the changeable paper overlay, allowing the user to swap out to their preferred design. To control the robot, a 3DoT micro-controller is used to connect the user to the robot via Arxterra, a platform for easy robotics integration. A sensor suite will enable this to navigate a 2D maze, as defined by the customer. Infrared sensors gives ModWheels the feature of line of the maze, keeping the toy car within the confines of the maze hallways. To avoid collision, a proximity sensor gives ModWheels the ability to detect the other robots, which allow for the robot to avoid collision within the maze.
Mission Objective for Fall 2017
ModWheels is a toy car that will navigate a multi-colored 2D maze using autonomous capabilities as well as Arxterra to guide the toy car through the maze. The initial phase consists of having the toy car navigate the maze with user input, to which ModWheels will then memorize the route taken during the initial phase and will be able to autonomously navigate the maze for the second phase, all while being able to detect other robots and avoid collision. These are the mission objectives stated by the customer.
System Design
ModWheels is sized to fit the maze as defined by the customer for the Fall 2017 EE 400D semester. This final document will detail the mechanical design, electronics and control, and sensor suite that made ModWheels the project that it is.

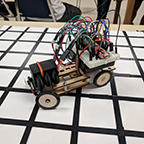
Figure 1: Fall 2017 ModWheels Prototype Used for Final Mission
Subsystem Design
Modeling Results
The use of SolidWorks helped to the ModWheels project design and model the chassis, steering mechanisms, and holders implemented onto the toy car. Tire treads were designed, modeled, and provided by Jeff Gomes.

Figure 2: Fall 2017 ModWheels 3D Model
Interface Definition
To help satisfy customer requirements, a system block diagram defines the capabilities of the ModWheels electronics and control. The interface matrix also verifies that the system block diagram and actual implementation of the ModWheels go hand in hand.

Figure 3: Fall 2017 ModWheels System Block Diagram for 3DoT v. 5.03

Figure 4: Fall 2017 ModWheels System Block Diagram for Pro Micro

Figure 5: Fall 2017 ModWheels Interface Matrix
Mission Command and Control
An important aspect in fulfilling ModWheel’s mission requirements is integration with the Arxterra platform, both with the phone application and web based application. To tailor and customize the user experience of the Arxterra applications to the ModWheels project, a few custom commands and telemetry will be incorporated. ModWheels would have implemented a 4 state custom command on the Arxterra GUI.
Electronics Design
In the design phase, ModWheels was design to electronically and mechanically adapt to the v. 5.03 3DoT, which was to be provided by the EE 400D . Due to complications with the fabricated 3DoT v5.03 and the limited amount of time we were required to resort to the use of the Sparkfun pro micro and motor driver for the final implementation.
 Figure 6: ModWheels Cable Diagram for Pro Micro (Used on mission)
Figure 6: ModWheels Cable Diagram for Pro Micro (Used on mission)
Firmware
The software is one of the most important factors within the ModWheels project for maze navigation. With the help of Matt Shellhammer (Electronics & Control Engineer for ModWheels), an adaptation for maze navigation from EE 444 to EE 400D was made. Since the 3DoT was not used on the mission due to complications, a more simplified code was implemented on the prototyping board.
PCB Schematic & Layout
Among the requirements set by the customer, all projects must design and fabricate a custom PCB. However, due to the nature of our project and its design, a custom PCB is not necessary. In order to get the requirement of the custom PCB waived, a cable diagram for our project was provided. The description and diagram show that the components within our design can be directly connected into the 3Dot board without being interfaced through a custom PCB.

Hardware Design
The ModWheels toy robot implements a blend between 3D printed components, as well as laser cut wood. This blend of materials helps to optimize cost and time (wood being inexpensive and quickly cut by a laser cutter) while keeping functionality (3D printed steering mechanism and engine block to hold the servo).
Figure 8: ModWheels Fall 2017 Prototype used on mission
Verification & Validation Test Overview/Summary
To confirm implementation of requirements, verification and validation of requirements of the ModWheels project was performed. To perform verification and validation of the requirements, a verification list and a validation test procedure was created.
Project Status
Power Allocation
As requested from the customer, the ModWheels will be implementing the 3DoT micro-controller. Due to the nature of the 3DoT, power restrictions must be made to ensure proper operation and performance. The power budget not only gives a worst case scenario of power consumption, but also helps to provide numbers to calculate mission duration, a very important factor to mission success.
3D Print Times
As set by the customer, there is a limit on the time allotted for the parts that will be 3D printed for the robots. The rule for 3D printing is that total print time must not exceed six hours, with no single part taking more than two hours to print. Once the 3D models were finalized and sent to be printed, a full rundown of labor, time, and cost were provided, which gives ModWheels final print time results.

Figure 9: Final print time summary
Cost Report
As part of the requirements stated by the customer, a budget was set for the ModWheels project for no more than $200.00 . To help cut some costs, the EE 400D previous semester’s inventory of electronics, hardware, and materials were provided for use. The Budget report includes total cost of the project as well as cost of the project offset by inventory.

Figure 10: Fall 2017 ModWheels Budget
Schedule
To help keep ModWheels on schedule, a project plan was created. The project planning along with the project burndown helps to give an estimation to work performed and work needed to complete the project.

Figure 11: Fall 2017 ModWheels Top Level Schedule

Figure 12: Fall 2017 ModWheels Project Burndown
Future Work
As the Fall 2017 semester concludes, a list of tasks have been compiled for following semesters to help further the ModWheels project and improve the 400D class.
- Fix IR shield to get improved readings and improve line following (change resistor values and refabricate as well as narrowing the distance between inside IR sensors to improve line following).
- Implement 3DoT v5.03 within ModWheels.
- Improved Steering
- Improve steering mechanism on ModWheels chassis to improve steadiness of steering.
- Change screws holding steering mechanism together to clamps or something that locks together so they steering mechanism won’t unscrew as it moves and turns (similar to what holds the 3DoT into place on the ModWheels chassis).
- Reduce size of servo holder to have a tight fit for the servo so it won’t move as it tries to move the steering mechanism.
- Improve software to implement Arxterra control of the robot (implement and test software developed for 3DoT v5.03 ModWheels after v5.03 is fixed).
- Improve power budget (more testing with servo to determine current draw and effectiveness at different supply voltages).
- Design modifications to allow for software upload while 3DoT is in the ModWheels chassis.