
By: Paul Ahumada, Systems Engineer
By: Kevin Armentrout, Electronics and Control Engineer
Table of Contents
Introduction
As shown in a previous blog post, IMU accuracy has already been verified. The point of this blog post is to show the integration of the IMU into Arxterra as custom telemetry.
Previous Results
The IMU produced the following errors when compared to expected values:
| IMU Testing | |||
| Test | X | Y | Z |
| Steady State | 0.113° (MAE) | 0.02° (MAE) | 0.13% |
| 6 Degree Decline | 0.54° (MAE) | 2.60% | 0.13% |
| 6 Degree Incline | 0.69° (MAE) | 0.65% | 0.14% |
| 20 Degree Roll Left | 0.67% | 0.58° (MAE) | 1.14% |
| 20 Degree Roll Right | 1.13% | 0.40° (MAE) | 1.67% |
The IMU had excellent accuracy when compared to actual values, making it the ideal selection choice for the I2C IMU.
System Integration into Arxterra
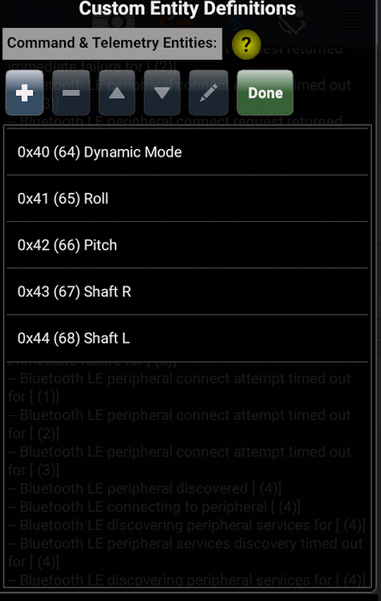
Through the phone app, custom telemetry was set up to read short variables (4 bytes) that would be sent to the control panel. For the IMU, the variables ‘Roll’ and ‘Pitch’ are being sent with a range of =/- 180 for the rotation angles.
The Arxterra Control Panel had an accuracy of +/- 1 when implemented. For example, if the real world ‘Roll’ angle was 12 degrees, Arxterra could possibly read 11 or 13 degrees. Arxterra output whole numbers, too. Accurate, updated results showed that real-time values were being read from the IMU.

Conclusion
The IMU’s pitch and Roll Telemetry has been successfully implemented in the Arxterra control panel as custom telemetry with less than a degree error for the MCU and +/- 1 degree of error the Arxterra Control Panel. This fulfils the requirement for L2-4, L2-17 and L1-5.