Spring 2016 Velociraptor: Hardware &Simulation
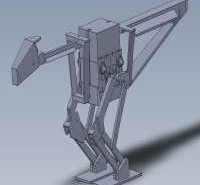
By: Mingyu Seo (Manufacturing &Design) Introduction: The purpose of this blog is to show the feasibility of the design we’re going to incorporate in to our robot. Using Solidworks, we’ll be able to validate center of mass of the robot when we’re performing static walking. Also by using the simulation on Solidworks, it’ll show the … Continue reading Spring 2016 Velociraptor: Hardware &Simulation