[av_image src=’/wp-content/uploads/2017/04/FlexSensors.png’ attachment=’23531′ attachment_size=’full’ align=’center’ styling=” hover=” link=” target=” caption=” font_size=” appearance=” overlay_opacity=’0.4′ overlay_color=’#000000′ overlay_text_color=’#ffffff’ animation=’no-animation’][/av_image]
[av_heading heading=’Spring 2017 Prosthetic Hand: Force Sensor Test’ tag=’h3′ style=’blockquote classic-quote’ size=’24’ subheading_active=’subheading_below’ subheading_size=’15’ padding=’10’ color=” custom_font=”]
The Robot Company | CEO Professor Gary Hill
[/av_heading]
[av_textblock size=” font_color=” color=”]
Blog Post Created by Project Manager | Bianca Esquivel
Project Test Executed by Electronics and Control Engineer | Forest Nutter
[/av_textblock]
[av_heading tag=’h1′ padding=’10’ heading=’Preliminary Information’ color=” style=’blockquote modern-quote’ custom_font=” size=’20’ subheading_active=” subheading_size=’15’ custom_class=”][/av_heading]
[av_icon_box position=’left’ boxed=” icon=’ue864′ font=’entypo-fontello’ title=’Test Objective’ link=” linktarget=” linkelement=” font_color=” custom_title=” custom_content=” color=” custom_bg=” custom_font=” custom_border=”]
In order to avoid breaking items that we picked up with the prosthetic hand, we chose to add force sensors to the fingertips. Our first thought was to use threshold or pid controller to avoid dropping or breaking items we pick up, but later we determined that each item will have different force requirements to pick them up. Therefore, we decided to provide feedback (vibrating motors) to the user so the user can decide how much force to apply to a picked up object. So if the user picks up something heavy he will want the vibrating motors to vibrate a lot compared to picking up a chip that will have the vibrating motors vibrating softly.
This Test Reflects the Requirement:
L2-5 Grip | System
The hand shall be able to grip the cup of water and the chips ahoy cookie without crushing it and without letting these items slip.
L2-5.1 The hand should integrate a force sensor measuring the force being applied at the fingertips and the tip of the thumb. This will allow the hand to stop gripping so as to not crush the food items before reaching the mouth.
[/av_icon_box]
[av_icon_box position=’left’ boxed=” icon=’ue856′ font=’entypo-fontello’ title=’Materials’ link=” linktarget=” linkelement=” font_color=” custom_title=” custom_content=” color=” custom_bg=” custom_font=” custom_border=”]
(1) Arduino Uno
(1) 10 Kohm Resistor
(1) Force Sensing Resistor, 0.5 inch circle
(-) Duct Tape
(-) Wires
[/av_icon_box]
[av_heading tag=’h1′ padding=’10’ heading=’Test Set Up’ color=” style=’blockquote modern-quote’ custom_font=” size=’20’ subheading_active=” subheading_size=’15’ custom_class=”][/av_heading]
[av_tab_container position=’top_tab’ boxed=’border_tabs’ initial=’1′]
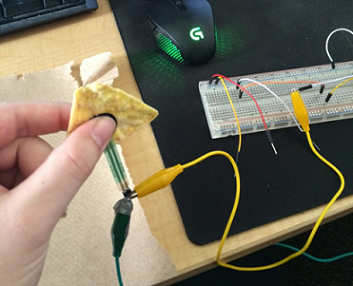
[av_tab title=’Set Up Image One’ icon_select=’yes’ icon=’ue826′ font=’entypo-fontello’]
[/av_tab]
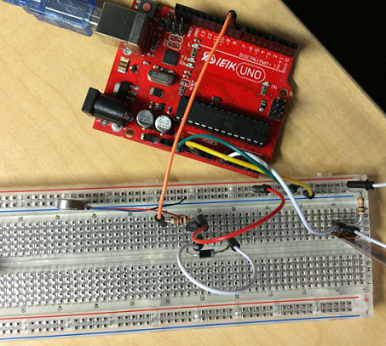
[av_tab title=’Set Up Image 2′ icon_select=’yes’ icon=’ue826′ font=’entypo-fontello’]
[/av_tab]
[/av_tab_container]
[av_textblock size=” font_color=” color=”]
The wires were attached to the flex sensors via duct tape to reinforce the connection to the alligator wires that connect the sensor to a breadboard. The breadboard is setup for the vibrating motors that we plan to use on the PCB. We are able to control the speed of the vibrating motor through the PWM pin and an npn transistor. The diode is just to protect the transistor from back emf.
[/av_textblock]
[av_heading tag=’h1′ padding=’10’ heading=’Results’ color=” style=’blockquote modern-quote’ custom_font=” size=’20’ subheading_active=” subheading_size=’15’ custom_class=”][/av_heading]
[av_textblock size=” font_color=” color=”]
The force sensor can detect the difference between a firm grip, at analog voltage readings of 295-310, vs that of a tight grip, at analog voltage readings of 110-130. This is the difference between holding a chip firmly and breaking the chip.
[/av_textblock]
[av_heading tag=’h1′ padding=’10’ heading=’Conclusion’ color=” style=’blockquote modern-quote’ custom_font=” size=’20’ subheading_active=” subheading_size=’15’ custom_class=”][/av_heading]
[av_textblock size=” font_color=” color=”]
The force sensor is capable of discerning the difference between forces that will hold and forces that will break an object, which is what we need for the prosthetic fingers to have in order to control their grasp on objects that are more frail to hold, such as chips.
The image below is the fritzing diagram that shows how the force sensors can be implemented to the circuitry of the prosthetic hand.
[/av_textblock]
[av_image src=’/wp-content/uploads/2017/04/Hand_FritzingDiagram-2-300×240.png’ attachment=’23538′ attachment_size=’medium’ align=’center’ styling=” hover=” link=” target=” caption=” font_size=” appearance=” overlay_opacity=’0.4′ overlay_color=’#000000′ overlay_text_color=’#ffffff’ animation=’no-animation’][/av_image]