AdBot Rover

Spring 2016 AdBot Materials Trade-off Study
By Muhammad Maqbool (Manufacturing and Design) There are many different types of material we used to finish our final design. The body and the arms of our AdBot were made of aluminum of 0.125” thickness that we obtained from McMaster. The reason for using aluminum instead of plastic was the size of our body and […]

Spring 2016 AdBot Final Project Documentation
AdBot is a robot that can drives around campus in place of a person passing out flyers. Dang Le (Project Manager, Electronics and Control) Don Tran (Mission, Systems, and Test) Muhammad Siddiqui (Manufacturing and Design) Table of Contents Executive Summary Program Objective The project objective is to build a rover that will simulate a flyer […]

Spring 2016 AdBot Custom PCB Schematic
By Dang Le (Project Manager) The PCB schematic for AdBot, made by the project manager, in figure 1 shows pin allocations with the integrated circuit components and the Arduino Uno. The first L298P half bridge is the surface mount PowerSO20 component, which is not the Multiwatt15 breadboarding type so the pins read differently. The sense […]

Spring 2016 AdBot Custom PCB Manufacturing
By Muhammad Maqbool (Manufacturing and Design) Dang Le (Project Manager) PCB layout was one of the hardest tasks to complete. We were left with no schematic. Our project manager worked on the schematic and the manufacturing engineer put together the layout. One of the problems our manufacturing engineer faced while doing the layout was the […]

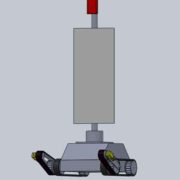
Spring 2016 AdBot SolidWorks/3D Model Design
By Muhammad Maqbool (Manufacturing and Design) Start out with understanding the basic design of AdBot. It consists of a total of eight big wheels, eight tension wheels, four tracks, two gears, one wooden shaft, one wooden pole, one pole holder, and one flat top. The design for the wheels and tracks are from previous semester’s […]

Spring 2016 AdBot Stall Current Test
By Don T. (Mission, Systems, and Test) Experiments AdBot was taken to lab equipment to measure the motor specifications. Some multimeters have a 0.020 A limit. The torque test apparatus was used on motors. 1K, 5K, 10K, and 20K potentiometers could not stall the motors. The motor shafts were held onto a bearing by a […]

Spring 2016 AdBot Motor Driver Trade-Off Studies
By Don T. (Mission, Systems, and Test) Dang Le (Project Manger) Motor Driver Trade-Off Study The Arduino pins supply less than 0.040 A. The small Pololu motors with 120:1 or 200:1 gear ratio run on 0.120 mA and more. The result is to find motor drivers. The motor drivers’ specification of interest are tabled. The […]

Spring 2016 AdBot Software Design
By Don T. (Mission, Systems, and Test) Dang Le (Project Manager) The software block diagram shows the order that the firmware handles data and calls main functions. Software/Firmware Design Details In the arxrobot_firmware tab, edit just #define project TRUE. The loop() function basically calls commandDecoder(). The command tab is where the commandDecoder() function is written. […]

Spring 2016 AdBot System Block Diagram and Interface Matrix Definition
By Don T. (Mission, Systems, and Test) Dang Le (Project Manager) A system block diagram and interface matrix allow people to replicate the project. They show the components that are used and wire connections. AdBot’s interface matrix begins displaying all the Arduino Uno’s pins and names. Components are placed in columns. When an Arduino pin […]
Spring 2016 AdBot Critical Design Review
The Rover should travel on level area, ramp area, and stair ways during the mission test. Critical Design Review By Dang Le, Project Manager Dang Le (Project Manager) Don Tran (System Engineer) Muhammad Ali Siddiqui (Electronic Engineer) Muhammad Maqbool (Manufacturing Engineer) Executive Summary Program Objective/Mission Profile Program Objective The project objective is to build a […]