Velociraptor (Th)

Velociraptor (Th) Final Documentation
By: Paul Ahumada, Project Manager Members: Kevin Armentrout, Electronics and Control Engineer Victoria Osaji, Manufacturing and Development Engineer Table of Contents Project Overview Mission Profile 3rd Generation Velociraptor is a robot developed by the CSULB 2016 Fall Semester class that will compete in a Jurassic/Modern Game: Save The Human with other toys on the last […]
PCB
By: Victoria Osaji, Manufacturing and Development Engineer Table of Contents Introduction: A printed circuit board (PCB) also known as a printed wiring board is used to build the infrastructure for electronic devices. The purpose of this infrastructure is to mount components and provide the electrical connection between the components in our system, which in our […]
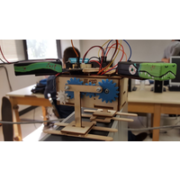
Mechanical Design:
By: Victoria Osaji, Manufacturing and Development Engineer Introduction: After a lot of trial and error and prototyping, we have the basis for our mechanical design. Listed below we explain how we achieved each part. Level 2 Subsystem below: 3. 3rd Generation Velociraptor (Th) should resemble a Velociraptor of the Theropodous Dinosaur Suborder that is scaled […]
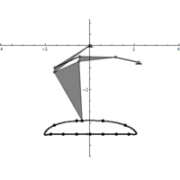
Coverage Angle Test
By: Victoria Osaji, Manufacturing and Development Engineer Table of Contents Design Analysis: Introduction: This was one of the four tests we conducted to demonstrate the mechanical capabilities of our robot dinosaur. In this test we are looking to determine the radius our robot head can cover essentially measuring what areas our robot can see as […]

Load Capacity Test
By Victoria Osaji, Manufacturing and Development Engineer Table of Contents Introduction: This was another one of the four tests we conducted to demonstrate the mechanical capabilities of our robot dinosaur. In this test we are looking to determine the load the robot can sustain without any significant damage or falling apart. This way we know […]
Design for Feet Trade-Off Study:
By: Victoria Osaji, Manufacturing and Development Engineer Introduction: The foot of the raptor is probably the most important piece to the animal. This determines the most support for the center of mass and gravity for the raptor. Based on this ideology, we thought about three different types of design for the foot of our raptor. […]

Materials Trade-Off Study:
By: Victoria Osaji, Manufacturing and Development Introduction: The previous semester, spring 2016, did a very detailed material trade-off study that we liked based on Aluminum and PLA Filament (3D printing material). We found this very useful because we have ideas that we can now build off of. Although, our design may differ in some places […]
Leg Design:
By: Victoria Osaji, Manufacturing and Development Engineer Table of Contents Introduction: The legs are one of the most important and complicated parts of this project. I mean without legs or not being able to control the robot the project would not meet a lot of requirements and it would not work. So we took this […]

Gear Train:
By: Victoria Osaji, Manufacturing and Development Engineer Introduction: The mechanical system we implemented was the gear train and it was designed to move the legs, head and tail. For the legs, the small gears have 10 teethes and big gears have 16 teethes. One of the small gears is actually a motor coupler as well […]

IMU System Incorporation
By: Paul Ahumada, Systems Engineer By: Kevin Armentrout, Electronics and Control Engineer Table of Contents Introduction As shown in a previous blog post, IMU accuracy has already been verified. The point of this blog post is to show the integration of the IMU into Arxterra as custom telemetry. Previous Results The IMU produced the following […]