{kind=link}
Spring 2016 AdBot Preliminary Design Documentation & Plan
AdBot is a rover that will climb stairs.
Preliminary Design Document
By Dang Le, Project Manager, and Don Tran, System Engineer
- Dang Le (Project Manager)
- Don Tran (System Engineer)
- Muhammad Ali Siddiqui (Electronic Engineer)
- Muhammad Maqbool (Manufacturing Engineer)
Program Objective/Mission Profile
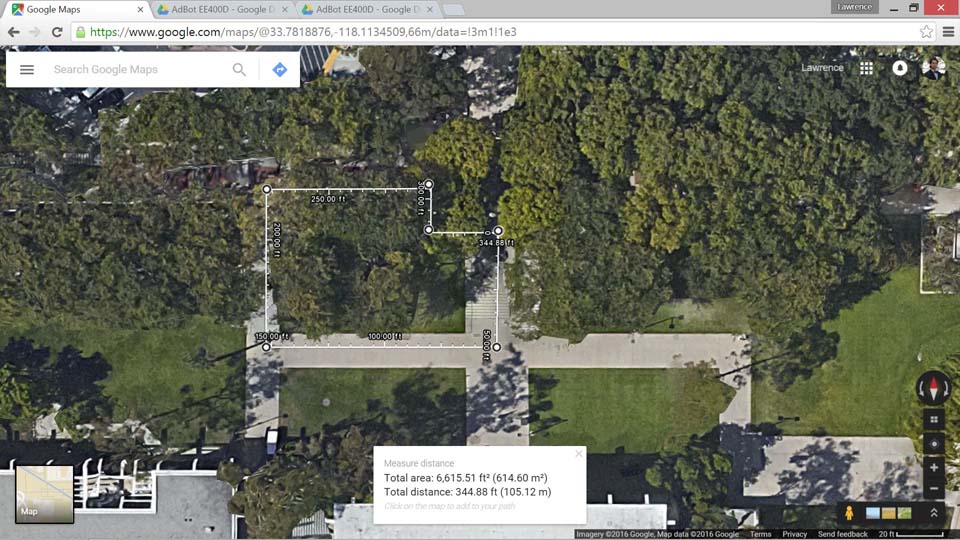
The customer wants a stair climbing robot to advertise his company in front of a building, and wants wireless steering using the Arxterra app for smartphones. We will give the customer Bluetooth. We will design the rover by May 14, 2016 around a $400 starting budget. The customer wants to use any parts available in the Electrical Engineering department or from the previous semester’s RoSco. We will document our thinking across the semester. The mission profile will be a test course consisting of the 9 steps in front of the USU building, then the concrete path clockwise leading down some inclines back to the bottom of the stairs. The images below show the bird’s eye view, front, and side of the test course.


Project Program Requirements
Level 1 Requirements
1. The project involving making AdBot and the blog posts shall be completed by 5/13/2016, which is last day of this 400D course:
2. The budget shall be $250, which is an estimate of most parts needed.
3. AdBot shall follow CSULB regulations for activities and for advertising.
4. AdBot shall travel 160 feet on concrete. This distance is the length of the test course counting inclines and stairs.
5. AdBot shall travel up 9 or more steps. The stairs in front of the University Student Union building consists of 9 4.3″x16″ steps.
6. AdBot shall use the Arxterra application for smartphones.
7. AdBot shall protect its hardware from rainfall and from a 50 psi water sprinkler.
8. The rover shall have at least one 3D-printed wheel, track, or parts.
ADVERTISING/PUBLICIZING EVENTS
All programs must be properly scheduled, confirmed and cleared prior to any notice or advertising of the event. All advertisements must include the sponsoring organization, name of program, date, time, location and contact information. Advertising in the USU of events hosted in the University Student Union and Soroptimist House require posting approval by ASI Communications, USU-235.
Level 2 Requirements
Level 1 requirements below are the same as the ones above, but restated.
Mission
L1: The primary focus of AdBot’s design is to make sure that it shall be able to travel up and down stairs in order for it to complete the test course that the president and division manager laid out.
- The front of the University Student Union building consists of nine 4.3″x16″ steps. AdBot shall be able to travel up and down at this 15-degree incline.
- AdBot shall be operational approximately 30′ from the smartphone-controller when no obstacles are obstructing. HC-06 Bluetooth receiver is rated for approximately 30 feet.
- AdBot shall lift its front end at least 4.3 inches with the use of two servos.
- The time to complete one circle of the test course shall be approximately sixteen minutes, at this point. This is time does not consider longer times going up stairs. For now, the following calculations are guessed for the 64 rpm free run speed, 800 mA stall current motors.
Budget
The budget shall maintain a low cost. The cost shall stay below $216 to $366. RoSco last had problems with 3D-printing driving up their costs from $216 to $366, and some cost was having to even pay for printer errors and problematic parts.
- RoSco’s four motors and six servos uses 3 to 6 V input. The current 7.2 V battery is capable of driving those parts. It shall be used while prototyping AdBot.
- It is important for AdBot that the amount of power it uses shall allow it to run for the proper length of time. The best case is it can travel the test course laid out one or more times. The current motors have a free run speed of 64 rpm and a stall current of 800 mA. When torque is calculated, then one can find the exact total power consumption. http://www.me.mtu.edu/~wjendres/ProductRealization1Course/DC_Motor_Calculations.pdf
AdBot shall have one or more 3D printed wheel, tracks, or parts. The manufacturing division within the company focuses on 3D modeling and 3D printing.
- AdBot shall use ABS plastic against other types. When printed correctly, this material is durable. One ABS plastic track on RoSco can withstand 150 pounds placed upon it.
- AdBot shall keep its tracks from coming off while AdBot is moving. The current treads are approximately 12 inches when loose. AdBot’s design will consider stretching the treads or shielding it around the wheels. The treads may also be cut and melted to a shorter size.
Size
AdBot shall build upon RoSco’s design while conforming to CSULB regulations for activities and for advertising.
- AdBot shall fix the loose tracks that was the main problem that RoSco had.
- RoSco protected its components from direct rainfall, such has having a waterproof chassis and motors inside its legs, but the cover for the chassis did not close its gap fully. Therefore, AdBot shall also protect its hardware from both rainfall and puddles, for as long as its mission duration. One solution would be using weatherstrip tape as one can cut it to exact dimensions.
- AdBot shall remain under 3 feet. The regulations for activities and advertising, in short, issues that signs must not exceed 3×3 feet. The height of the rover and the stake together will be designed under this height.
Feature
AdBot shall require the use of the Arxterra application on smartphones and the Arxterra Control Panel on the internet browser to control it.
- Arxterra has a setting called community where controls are on the Control Panel at http://cp.arxterra.com/# and the camera on the smartphone turns on for visible capability. AdBot shall be able to move the camera around separate from its main body. The solution is to have a pan, tilt system, because the firmware code for Arduino has a pan and tilt function.
- The smartphone shall have internet access. Arxterra’s Control Panel does not connect to the phone when the phone is not on a wireless internet network.
Timing
The project involving making AdBot and the blog posts shall be completed by 5/13/2016, which is last day of this 400D course.
- The project design phase shall be done by March 4 latest, as according to schedule: http://arxterra.com/wp-content/uploads/2016/02/projectschedule1-72dpi-1.jpg
- The critical software, electronic, and mechanical designs and reiteration engineering process shall be complete by April 2. This allows one month for assembly, verification tests, and launch/video preparations.
{kind=link}
Design Innovation
AdBot’s design will take to consideration a maximum load weight placed upon the tracks or the chassis-to-track connections in order to keep the tracks aligned. AdBot may or may not have a pan and tilt system holding a picket sign. The priority is to make AdBot work and have enough power to complete the mission profile.
Systems Design
AdBot’s tracks shall have up to 1 motor each. It will have free spinning wheels on opposite ends of the tracks. Parts from the old PCB will be reused. More blocks will be added to the systems design as we learn more about the project.
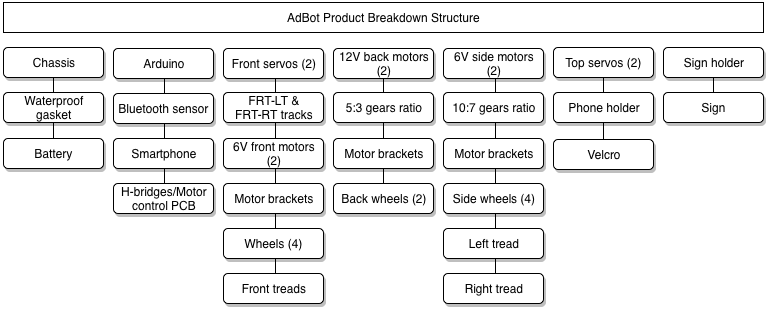
Product Breakdown Structure
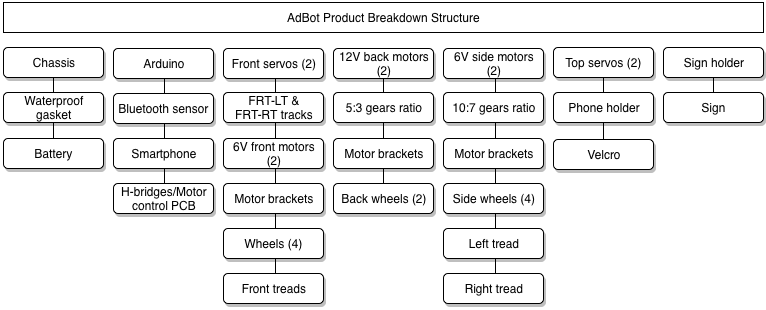
The PBS lists the software and hardware needed for a running prototype.
Manufacturing and Design
By Muhammad Maqbool, Manufacturing Engineer
The big tracks on each side of the robot consist of a total of four wheels, two in the back connected together with a steel rod and two in the front connected with another steel rod. We are thinking about using any spare leather belt so we don’t go out and buy it. on the belt we are thinking to layering wood patches so our track can have a firm grip which we will obtain through popsicle sticks. The wheels will be rotating at all times hence rotating the belt with it. As you can see the big tracks are attached to two small tracks called legs. The legs are attached to the gear system hence moving up while climbing up the stairs. The legs consist of four wheels total, two on each side.
For the wheels we will be needing reliable 3D printer, if not then we will be using the wheels from the old rosco as they are in good condition. Our main goal is to cut the cost as much as we can when it comes to the designing. So we can save money and buy some heavy duty motors and battery that can last longer once our robot performing its task.
The chassis and tracks shall be constructed after the dimensions are finalized in SolidWorks.
We shall use a 3D printer to print our desired components. ABS plastic will used to cut the cost to lower than $90.
Muhammad Maqbool shall obstain good 3D prints with the desired dimensions.
He will use Eagle CAD to design the PCB. The PCB will then be tested.
Small tracks on the AdBot will help it climb up, as it will be facing up while climbing up the stairs.
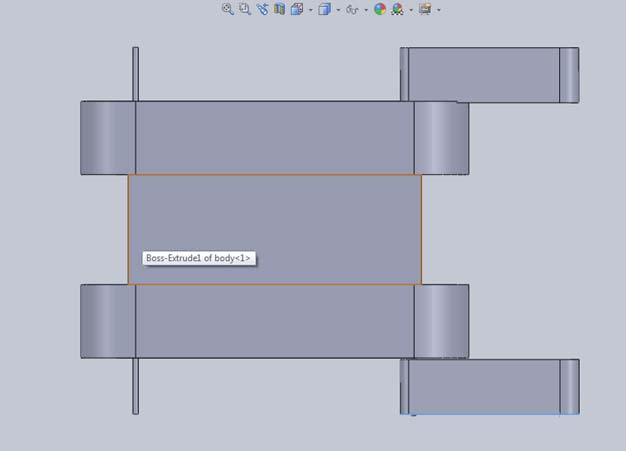
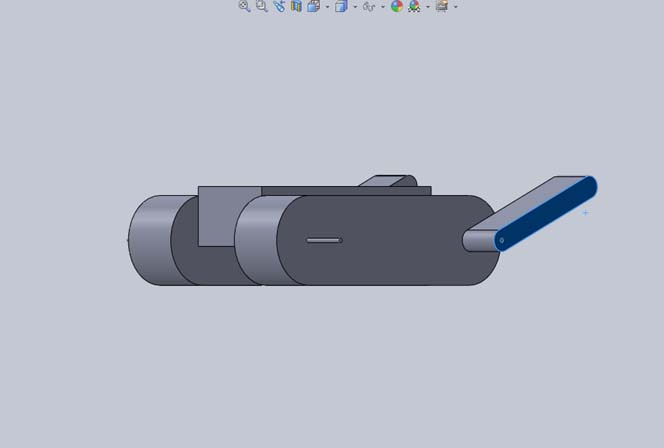
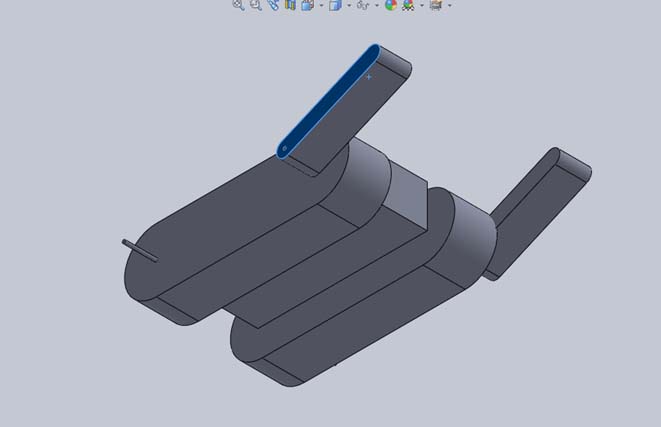
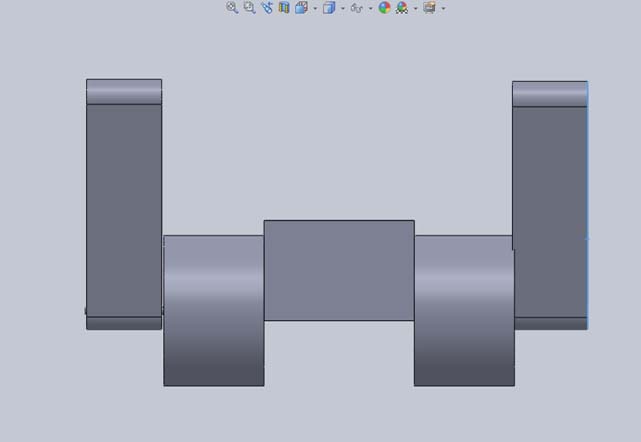
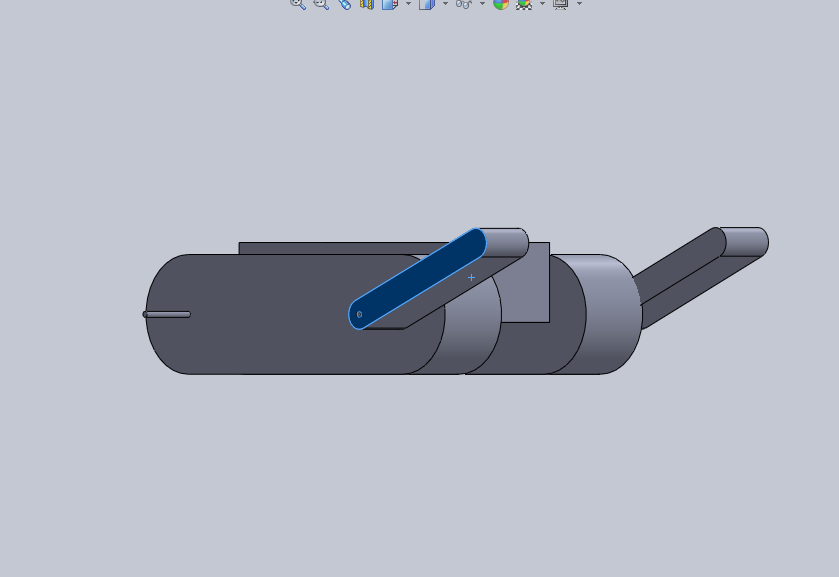
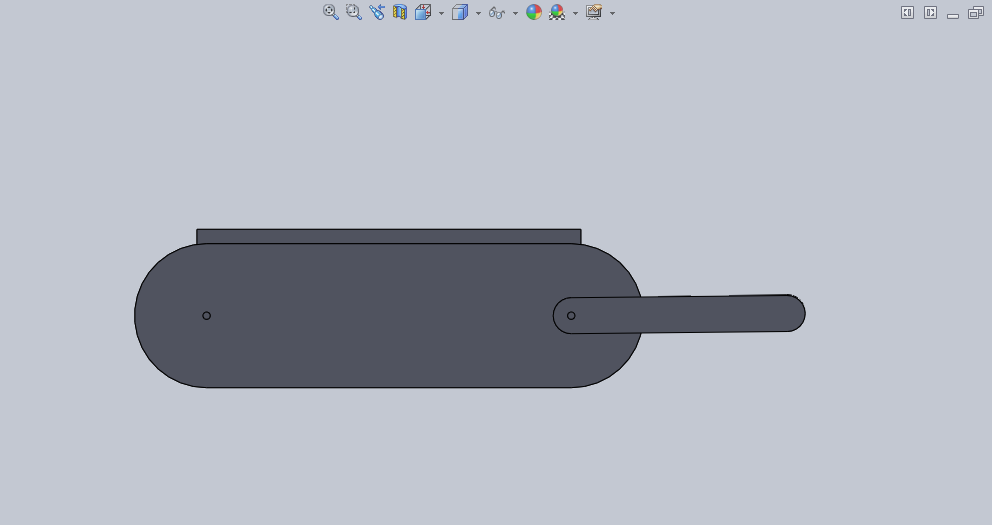
These are 3D models of AdBot:
Electronic and Test
By Muhammad Ali Siddiqui, Electronic Engineer
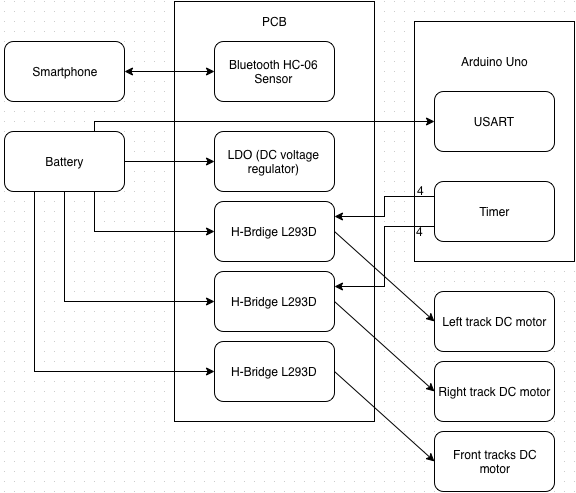
System Interface Matrix
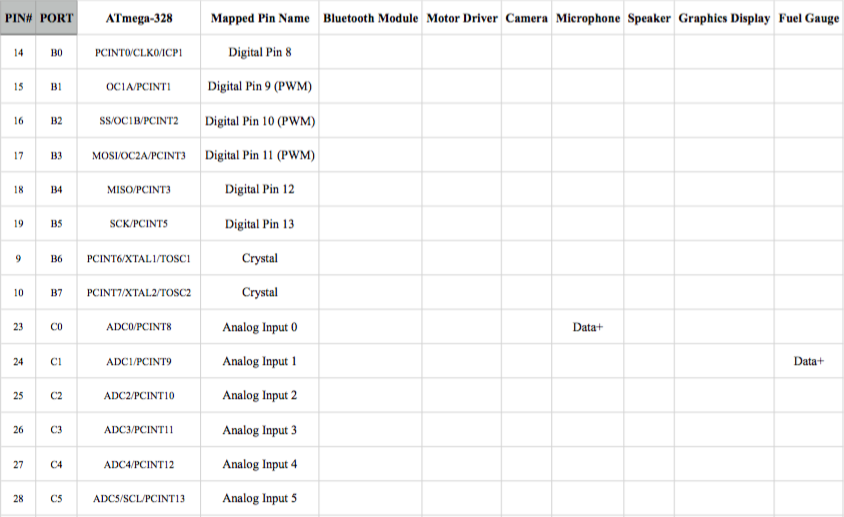
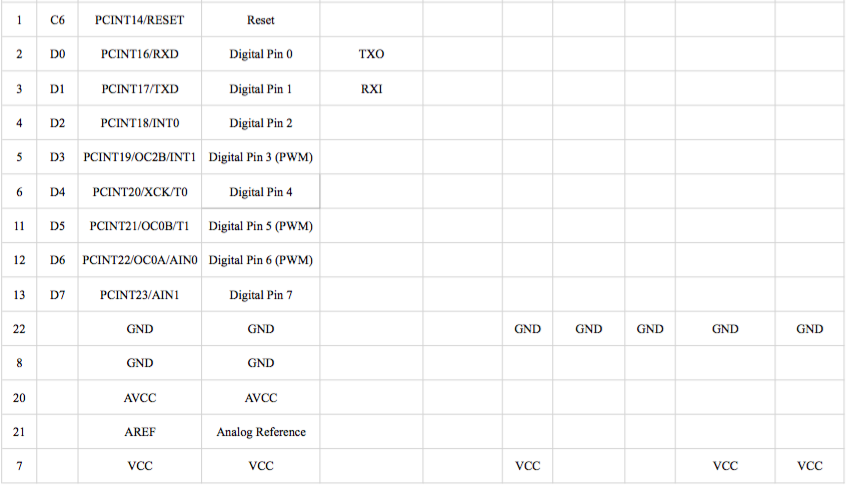
The interface diagram shows the connections of the Bluetooth sensor, motor control board, and motors.
- Work with systems engineer to create interface definitions and to create functions/subroutines for microphone, speake
- r, camera, and graphics display unit.
- Create fritzing diagram from the interface matrix.
- Create fritzing diagram for custom servo controller board.
- Create pcb layout for the custom servo controller board.
- Work with systems engineer to determine the type of battery to be used.
- Perform tests and run simulations to determine suitability of sensors being used.
- Consult with the division manager to determine audio and video encoding to be used for the AdBot.
- Shall be testing battery the to determine if it is capable to complete task 100% with 55 to 65% of battery consumption.
Unique Task Descriptions
By Muhammad Maqbool, Manufacturing Engineer
Preliminary Plan Document
By Dang Le, Project Manager
The AdBot diagram of work breakdown structure below shows individual responsibility during the project. Don is responsible for Mass report, Power report, Arduino coding, and verification test plan and report.
Muhammad Ali Siddiqui is in charge of PCB design, build breadboard, and coding for the motors, servo, Bluetooth, camera, audio, etc.
Muhammad Maqbool is responsible for 3D modeling and solid works design for chassis, wheels, and track.
Dang Le is responsible for project update, photo/video editing and order parts. He will take some work load from manufacturing like soldering components on PCB, cable tree wiring, and assembly AdBot.
Work Breakdown Structure
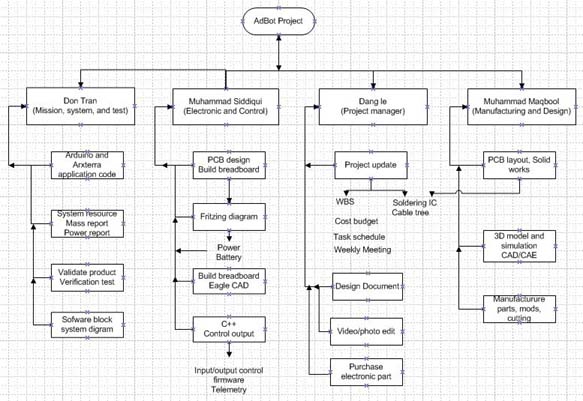
This work breakdown structure exists to provide task coordination in this project team. Each block indicates the responsibility of only one engineer designated it.
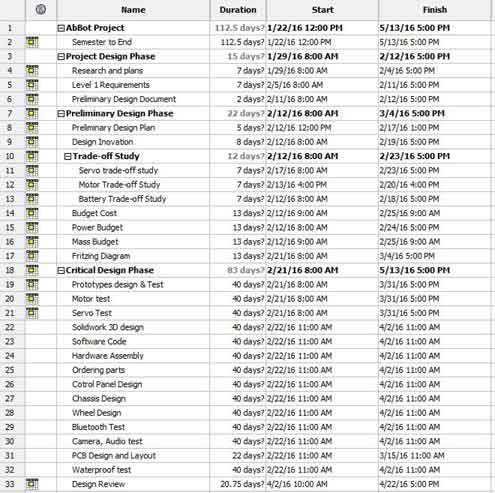
Project Schedule
By Dang Le, Project Manager
We have been working on the prototype of the AdBot. Muhammad and Don was testing the motor, servo, and Bluetooth device. In the mean time, Muhammad Maqbool was designing the wheels and chassis. We will test our prototype when everything ready and fully assembled. Using the Projectlibre tool, we should see our task move along with our schedule as we planned or not. This schedule allowed us to focus closely on each stage as we move on until the completion date. This is our final schedule in planning to complete our project.
Top level Schedule


The schedule begins on Feb-12 and ends on May-13. Both planned and actual remaining time will be measured in days.
System/Subsystem Level Tasks
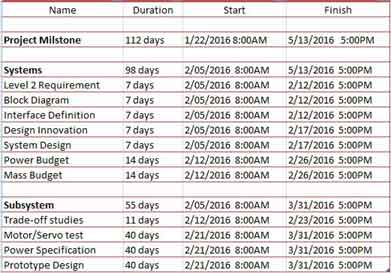
The system and subsystem level have defined by our work breakdown structure
Burn Down and Project Percent Completion
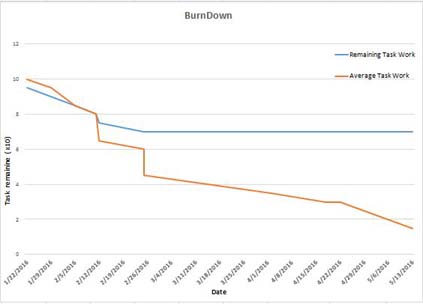
The burn down chart is measured by weekly progress.
System Resource Reports: Power Report, Mass Report, and Cost Report
Power Report
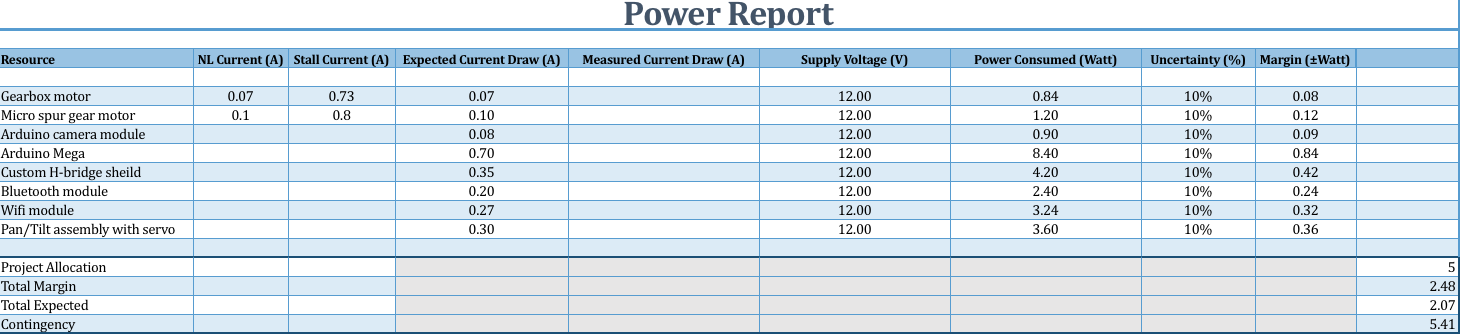
The projected values on the power report are all estimates based on research on components. Since the maximum current allowed was undefined, a reasonable value was chosen for the project allocation. By the end of this week, measured free and stall current for servos and motors will be added. This requires using an Arduino, spring scale torque-measurer, and more.
Mass Report
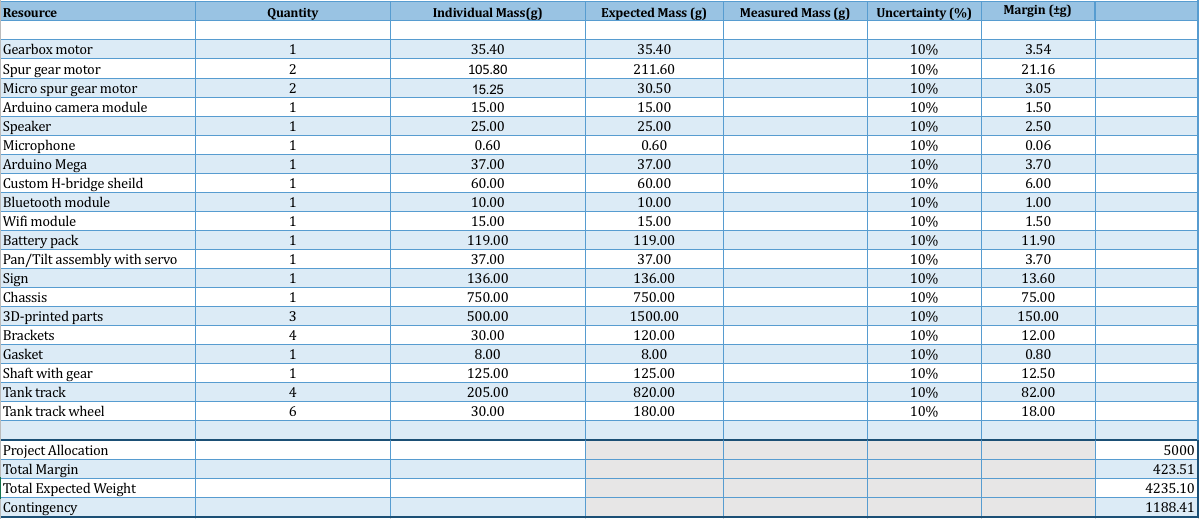
The projected values on the mass report are estimates based on research on components, and since the upper weight limit was undefined, the projected weight seems reasonable. By the end of this week, actual weights will be included.
The mass report came about this way:
1. Label all the parts in the AdBot blueprint/mockup drawing or check the PBS.2. Search available components from retailers/Sparkfun.
(Parts may change depending on torque decisions, etc.)
3. Search for model datasheet PDF files on Google to find component masses.
4. Estimate the mass for 3D-printed parts.
{kind=link}
Project Cost Estimate

The cost report from 2/26 is replaced with an alternate cost estimate made earlier by Don Tran. A better table will replace this in a few days once midterms are completed. The table currently excludes four motors and four servos from RoSco. A prototype rover is being assembled and more idea about the handling of mass and load by the current motors will be found out.