{kind=link}
Spring 2016 3 DOT Goliath Arxterra Firmware Motor Control Modification Test
By: Tae Min Lee (Mission, Systems, and Testing Engineer)
In order to use the Arxterra control panel we need to first implement the Arxterra firmware for the Goliath. After testing the Arxterra firmware we encountered a problem with the motor control. Since, the Arxterra firmware is implemented to using TB6612FNG motor control we had to make a few changes to the firmware to use the Arduino motor shield.
The following changes were made to implement the basic movements of the Goliath:

The run_AMS function is responsible for setting the direction and brakes on a motor. In this case we treated IN1 of controlling the direction on the motor and IN2 to controlling the brakes.
The following table will indicate the movement of the Goliath:

Setting a HIGH value for IN1 will make the motor move forward. While setting a LOW value for IN1 makes the motor go backward. In addition, the brakes are activated when we set IN2 variable to HIGH on the motors and setting a INT2 to LOW we will disable the brakes.
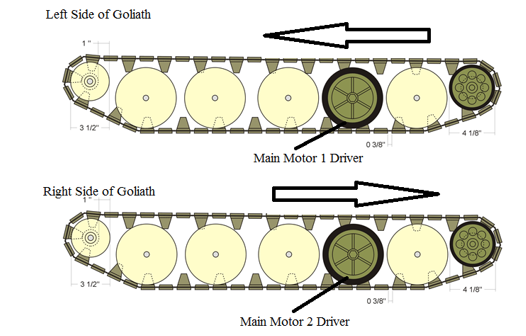
To make a right turn on the Goliath we made the motor on the left side to go forward while the motor on the right go backward. This provides a faster method of turning the Goliath to the right. A similar action can be performed for the left turn by having the motor on the right go backward and the motor on the left go forward.

Sources:
- https://www.arduino.cc/en/Main/ArduinoMotorShieldR3
- https://www.arduino.cc/en/Tutorial/DueMotorShieldDC