{kind=link}
Spring 2016 Velociraptor: Course Analysis
By Khoi Vu (Project Manager)

Figure 1: Actual Course
This is the analysis of the course in which the Velociraptor biped robot will need to complete. This course contains multiple surfaces that the robot will need to be able to walk on. Furthermore, the course will also have an obstacle that the robot will lift its leg high enough to walk over. It will also encounter another obstacle that it will have to avoid and navigate itself around it. This obstacle will be the size of a textbook.
Surfaces:
1.The first surface the robot will encounter will be linoleum. The coefficient of friction of linoleum tiles will vary from 0.3 to 0.5 depending on the amount of waxed that is on the tiles. (Refer to works cited 1)
Figure 2: Linoleum Tiles
2.In the second surface, the robot will encounter is a 3.5 cm rubber bar with the height 0.3 cm. According to the Engineer’s Handbook, the coefficient of friction between rubber and a solid is 1.0. The rubber bar separates the Linoleum tiles and Berber Carpet.(Refer to works cited 2)
![]()
Figure 3: Rubber Bar
3.Finally, the robot will also walk on Berber Carpet for the remainder of the course. The carpet has a 0.58 as its coefficient of friction. (Refer to works cited 3)
 Figure 4: Berber Carpet
Figure 4: Berber Carpet
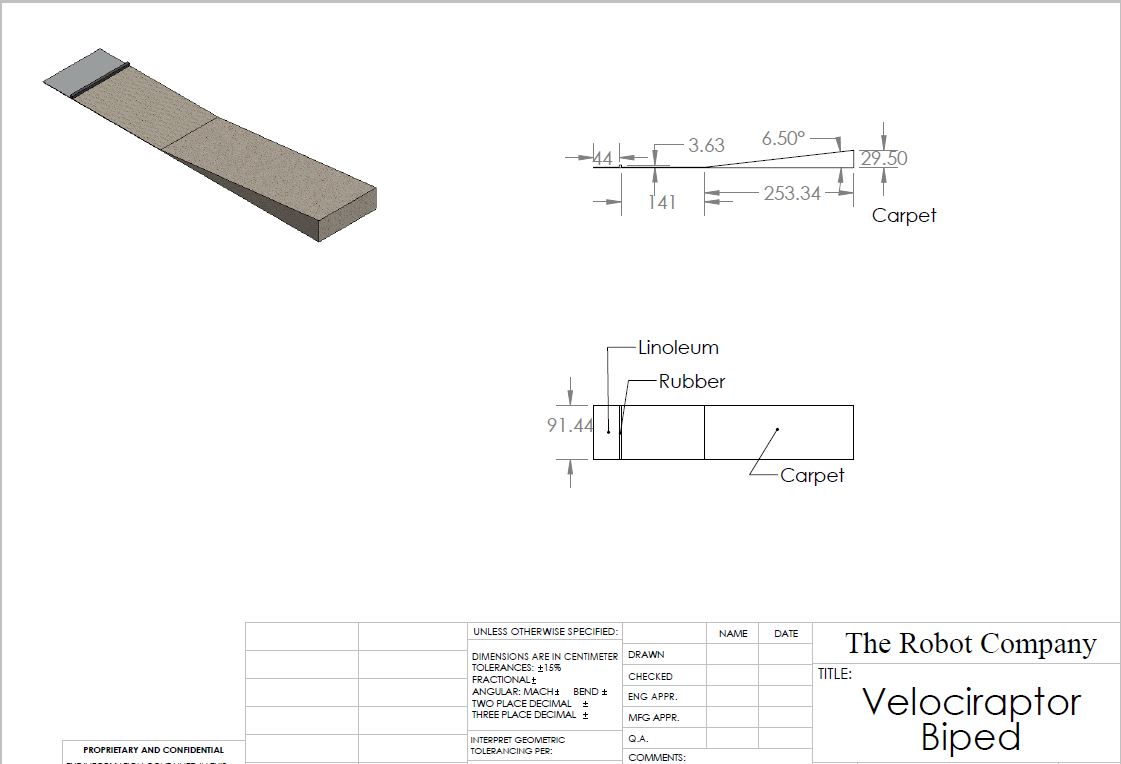
Figure 5: Measured Course Using SolidWorks
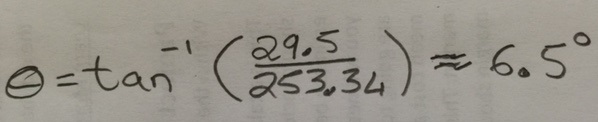
Equation 1: Calculation of the Incline angle
In Equation 1, the formula calculates the angle of the incline of the course by measuring the adjacent side of the angle and the maximum height of the ramp.
Works Cited