{kind=link}
Spring 2016 Velociraptor: Microcontrollers
By: Camilla Nelly Jensen (System Engineer)
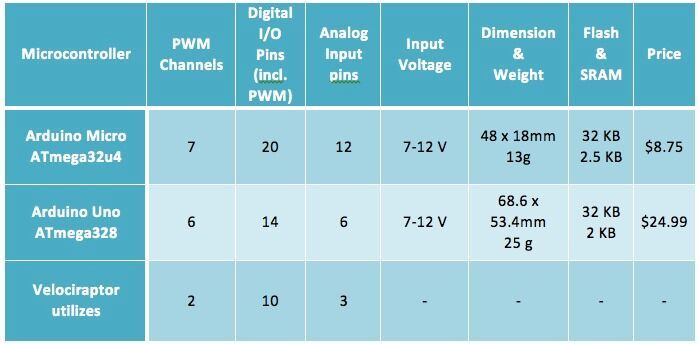 Table 1: Comparing the Microcontrollers
Table 1: Comparing the MicrocontrollersTable 1 compares two possible microcontrollers which acts as the brain for the Velociraptor. The microcontrollers will be used to connect all the components required for the Velociraptor. The chart compares pins available, input voltage, dimension, weight, memory, and average price.
The amount of pins necessary for the Velociraptor has been estimated from the systems resource worksheet which allocates the pins of the components such as sensors, servos, and the Bluetooth module.
The Velociraptor contain a ultrasonic proximity sensor that will be connected to 2 PMW pins, an accelerometer that need 3 analog pins, and 10 digital pins, 8 pins for the 8 servos and 2 pins for the Bluetooth module. The input voltage is the key to understanding the amount of voltage that the batteries must supply. The dimensions and weight are important to create a lighter and smaller body for the Velociraptor.
Minimizing the cost of the microcontroller is important as sought out in the cost report. After comparing the microcontrollers, the group decided on using the Arduino Micro because it has the lowest weight and cost and smallest dimensions and thus is the more cost effective choice for the Velociraptor.