Spring 2017 BiPed – BiPed Prototype/Walking Experiment
By: Alexander Clavel (Project Manager)
Approved by: Alexander Clavel (Project Manager)
Table of Contents
Introduction
The BiPed projects goal is to be able to create a walking bipedal robot that is able to perform static walking. The definition of static walking is walking that remains constantly balanced throughout the robots entire walk. In theory, when the power to the robot is cut off, the BiPed should stay standing and balanced. This is one of our main requirements. This blog post shows the process of building one of the prototypes.
Design/Construction
The overall construction which included buying all the parts and materials and then assembling them together took a little less than a day. We decided to go with a design that was found through reserach on youtube of walking bipeds. We were looking to find something simplistic as to be able to stay light on the material as well as the power draw on the electrical components. The BiPed we based this prototype off can be found here in a video. In the video, the biped uses a straight leg with no linkage and uses circular motion to walk forward. It is also a very small design that reaches a little under 20 centimeters in height which is something we would like to incorporate in ours.
Gear Box
{kind=link}
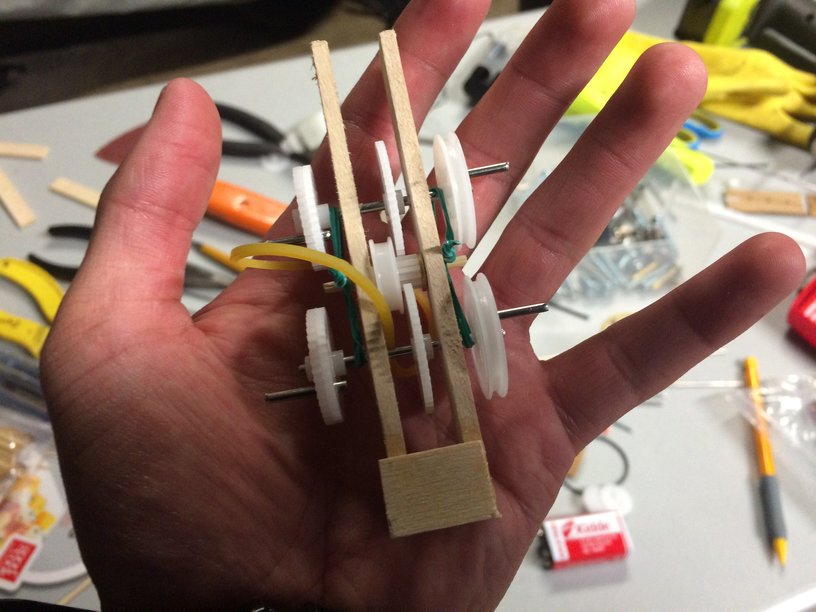
Figure 1

Figure 2
This was the first attempt at using a gear/pulley combination to drive the robot. The white round gears on the outside of the wood area in figure 1 show the rotational movement that the legs would be taking during the walking motion and the actual legs would be connected to the metal pegs sticking out. The rubberband in the pulley in figure 1 would wrap up to the pulley that is attached to the motor in figure 2. I tried using a 1 to 1 ratio for the pulley on the shaft to the pulley that will drive the 2 gears next to it. From reasearch done and experience with cars, I learned that using a smaller radius for the driver to a larger radius produces more torque, but less speed. For our requirements we will be needing that torque to be able to drive the robot, but we will also need to keep it fast enough to pass our speed requirement. From this reasoning I tried a 2 to 1 or 3 to 1 for the purpose of testing the walking motion. The two additional bevel gears in figure 2 were to work towards a solution for the balancing problem, but it was never completely finished due the professor not liking the design of our feet (which overlapped each other) so the design was to be changed anyways.
Leg Design/Movement
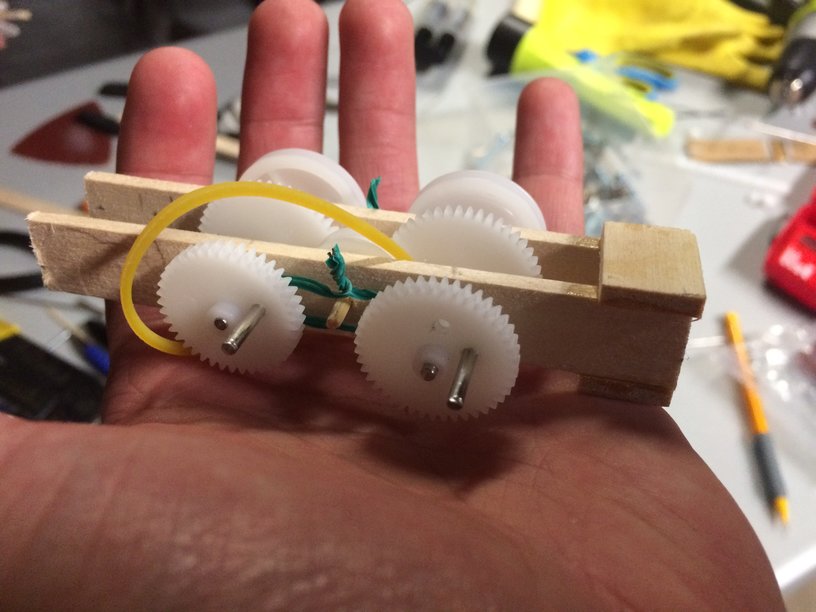
Figure 3
As stated before, there is a single wooden board for the legs that use a rotational motion for the legs. Figure 3 shows a side view of the gear box where the legs would be attached. The bottom of the robot is to the right of the image. This being just a test, I placed the pegs very close to the shaft because I just wanted to at least see if it would rotate. The final product would have to have a larger radius from peg to shaft so that the robot will be able to get a decent distance with each step. Again our design was kicked back because the feet that were attached were overlapping to account for the balancing. Without the overlapping feet, the balancing mechanism at the top of the robot would have had to be completed.
Conclusion

Figure 4
Figure 4 shows the entire main body of the biped attached. Again the rubberband is connected from the pulley in the gearbox to the pulley driver connected to the motor. The legs were not added to the image, but again, they are connected to the metal pegs sticking out on the sides. To restate it, the gear at the top of the robot is vestigal at this point and doesn’t serve a purpose for this prototype but should play a bigger part in the final product. When completely assembled, the robot shows that it does indeed give a clean walking motion while being held in the air. When placed on the ground the robot does “walk”, but it was a very rough, sloppy, and unbalanced motion. As it moves forward it does wobble side to side to a large degree, but at a very slow pace. Concluding comments would be that:
- It does perform a walking motion
- It does not stay balanced without the overlapping feet unless a balancing mechanism can be created
- The walking speed is very slow.
There will need to be more adjustments to the prototype for application on the final product.