{kind=link}
Spring 2017 Velociraptor: Range of Motion Prototype
By: Andrea Lamore (Manufacturing)
Approved By: Jesus Enriquez (Project Manager)
Table of Contents
Introduction
The range of motion of the leg determines the type of step the robot will take. A static walk requires a different stride from a dynamic walk and it is important to pick the linkages in the leg according to the type of walk that the robot will be using. The robot is to fulfill the following requirement:
L1-7: The Velociraptor shall be able to perform a static walk
Prototype
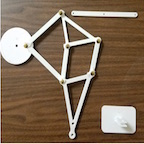
The velociraptor we are building shall have a static walk which uses two DC motors, so the Theo Jansen linkage was chosen as the optimal leg design for the robot. The following is the 3D printed model of the Theo Jansen Linkage. Before choosing the Theo Jansen Linkage [1] a series of other leg designs were cutout from cardboard and pinned together at the joints to simulate range of motion on a 2D plane.
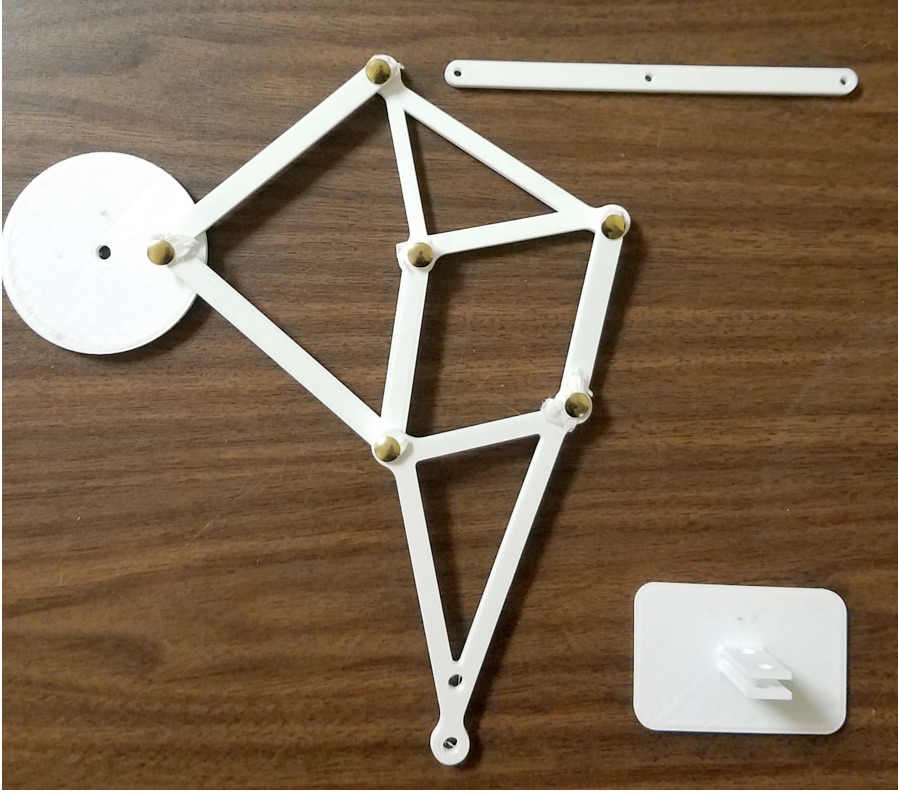
Figure 1: Theo-Jansen Leg Mechanism Prototype
Conclusion
The 3D printed model of the Theo Jansen Linkage was scaled up for this prototype just to get an early idea of whether or not to implement this idea into our design. This leg mechanism will be rotating upon a single axis of rotation using a DC motor to over all drive the load of the robot.
References
[1]: https://en.wikipedia.org/wiki/Jansen%27s_linkage