{kind=link}
Spring 2016: 3DoT David Leg Movement Angle Study
BY: Andrew Saprid ( manufacturing engineer)
Introduction:
The leg must be lifted in order for the spider to walk. Supplying 5 volts will be efficient enough to lift the leg, and rotating 360 degrees continuously.
Related Requirements:
Level 2 system requirement states:
The 3DoT David shall use two micro motors for the movement system of the robot.
Leg Study
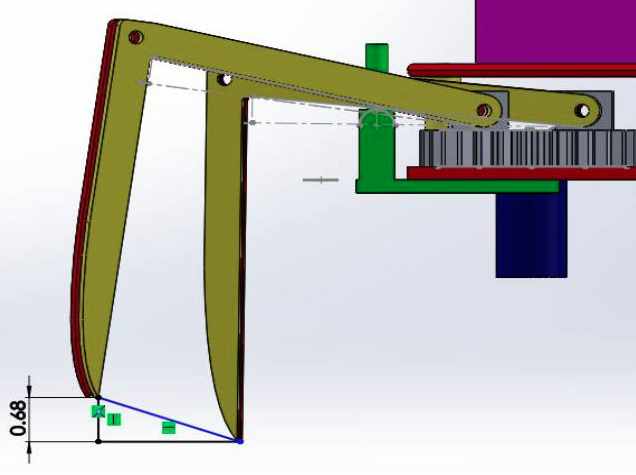
Calculations are done to find out the angle and the leg lifted off the ground. The calculated circumference of the 3 cm gear came up to be 4.78 cm. The initial lift of the leg is to be 5 degrees. by using sine to find x, it came to be .42 cm. The final lift is 13.3 degrees. The same method is done which came to be 1.1cm. Subtracting .42cm to 1.1cm, came up to be 0.68 cm off the ground.
Initial lift: 5 degrees Final Lift: 13.30 degrees
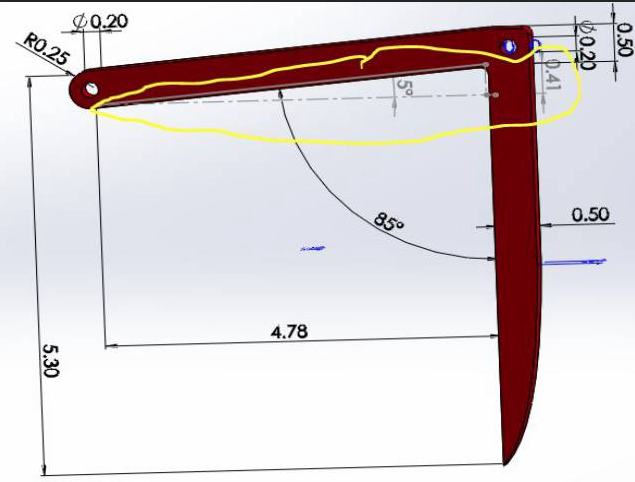
The calculations are as follow:
Circumference of the 3 cm gear
C = 2πr = 2π(0.76) = 4.78 cm
Given 5 degrees for the initial lift
sin(5) = x/4.78
4.78 x sin(5) = .42 cm
Final lift is 13.30 deg
4.78 x sin(13.30) = 1.1cm
1.1cm – .42cm
= 0.68 cm off the ground