3D SMD

Spring 2017 Final Blog Post – Pick and Place
Belinda Vivas (Project Manager) Tyler Jones (Manufacturing) Kevin Ruelas (Electronics) By: Chastin Realubit (MST) Table of Contents Executive Summary Program Objective By: Belinda Vivas (Project Manager) The objective of the Second Generation of the Pick and Place is to: ❖Build up from the First Generation of the Pick and Place machine and create an user […]
Pick and Place – Emergency Power Switch
By: Tyler Jones (Manufacturing) In order for the pick and place machine to have a safe and orderly operation the pick and place needs to incorporate an emergency switch. This should be obviously labeled and easily accessible to the user. If something were to occur as the machine is operating it might take too long […]

Pick and Place – 3DoT IC Tray
By: Tyler Jones (Manufacturing) The pick and place needs to have a way that it can easily access all the integrated circuits, and components that cannot fit in SMT part reels. This means that an IC tray must be created to house all the components for the nozzle to pick up. The IC tray must […]
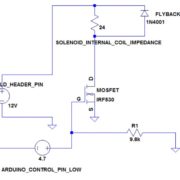
Pick and Place – SOLENOID VALVE DESIGN AND CONTROL
By: Tyler Jones (Manufacturing) and Kevin Ruelas (Electronics) The above Figure 1 and Figure 2 schematics show the solenoid circuit simulated in LTSpice. The circuit on the left shows that when the arduino pin is set to high the circuit turns on allowing the current to flow through drain and source to the solenoid valve. […]
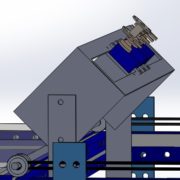
Pick and Place – 12 Servo Mount & Tape Feeder System
By: Tyler Jones (Manufacturing) and Belinda Vivas (Project Manager) In order for the pick and place machine to be able to complete one board, it must be able to pick and place many different devices for a whole board. It must be able to pick and place capacitors, and resistors of varying sizes 0402, […]

Pick and Place – Camera Test
By: Kevin Ruelas (Electronics) Using the interface definitions defined in the camera document. I was able to test the camera to make sure it worked and was taking a photo correctly. The microSD board was a big part of this test as it was required to test the image before figuring out how to send […]

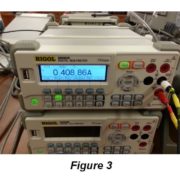
Pick and Place – Z-Axis and Nozzle Test
By: Tiler Jones (Manufacturing) and Chastin Realubit (MST) Z-Axis Motor: We did an experiment to see the load that the Z-Axis can handle and we found that it will still carry up to 2000 g. This experiment was done so that we can see if the motor can still move up and down even with […]
Pick and Place – Solenoid Valve Design and Control
By: Tyler Jones (Manufacturing) and Kevin Ruelas (Electronics) The above Figure 1 and Figure 2 schematics show the solenoid circuit simulated in LTSpice. The circuit on the left shows that when the arduino pin is set to high the circuit turns on allowing the current to flow through drain and source to the solenoid valve. […]
Pick and Place – Updated Requirements and Mass Reports
By: Chastin Realubit (Missions Systems and Testing) Level 2 Requirements: L2-1: Attached compartments shall not interfere with the functionality of the machine. L2-1a: Wires shall be shielded or incorporate heat shrinks in all areas of the pick and place machine. L2-1b: The RJ-25 cables shall be able to reach every operable part of the aluminum […]
Pick and Place – Servo Driver
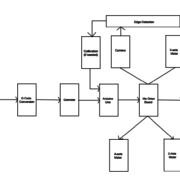
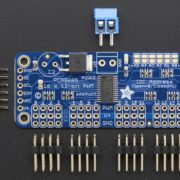
By: Kevin Ruelas (Electronics) The system block diagram presented in the PDR is undergoing changes, especially regarding the additional servos. The system block diagram that was made currently has two micro controllers connected via I2C. Both utilize the Me UNO shield and one port could generally house two servos. Using a 12-bit PWM/Servo Driver we […]