Spring 2016 Millennium Falcon Preliminary Design Document
BY:
Luis Valdivia (Project Manger)
Anthony Becerril (Systems Engineer)
Juan Mendez (Manufacturing Engineer)
Kevin Nguyen (Electronics Engineer)
Table of contents:
- Program Objective
- Level 1 Requirements
- Level 2 Requirements
- Design Innovation
- Subsystem Requirements
- Product Breakdown Structure
- Electronics System Design
- System Block Design
- Interface Definition
- Manufacturing Design
- Design and Unique Task Descriptions
Program Objective:
The Program Objective of the Millennium Falcon is to produce a safe, low cost, and durable quadcopter using ducted fans. The Millennium Falcon quadcopter will allow user friendly connectivity to an RC controller or any smartphone device using the Arxterra application. The project shall explore multiple innovative design solutions for yaw control leading to stable flight during operation of quadcopter. Stable horizontal flight control will also be addressed, as a design feature. The aircraft will resemble the famous spaceship from the Star Wars movie franchise with a newly designed shell and programmable lights.
Mission Profile:
The Mission Profile for the Millennium Falcon is to complete a flight course outside out CSULB property. The Millennium Falcon quadcopter must maintain stable flight as it circles around a tree in the field across the Whaley Park Community Center. Before attempting flight, the aircraft must be registered with the Federal Aviation Administration to ensure a safe environment for others.
Level 1 Requirements:
- The Millennium Falcon quadcopter team, aims to maintain flight stability.
- An enclosure box will protect battery.
- A new Printed Circuit Board (PCB) must be re-designed.
- New shell for aircraft intends to resemble aesthetic requirements.
- Millennium Falcon quadcopter must have longer landing legs to support vehicle.
- Quadcopter is expected to implement user input from wireless communication.
- The Millennium Falcon quadcopter must display a programmable light show during flight.
- Quadcopter will perform designated flight path while meeting safety requirements
- Purchases and services for material items must not exceed budget.
Level 2 Requirements:
- The Millennium Falcon quadcopter team, aims to maintain stability by using a fifth Electric Ducted Fan (EDF) for yaw rotation control. If side fan solution is not implemented, EDF orientation, specifically bracket angle, will be optimized for Millennium Falcon quadcopter stability during flight.
- A battery enclosure box must structurally support the weight of the battery and protect it from impact.
- New PCB will be required to keep all wiring internal and not exposed. Crystal oscillator, resistors, capacitors will be internally designed contrary to previous semesters design.
- New shell casing will meet aesthetics by resembling the Millennium Falcon spaceship from the Star Wars movies. New shell casing also will feature a latching system to secure shell onto Millennium Falcon quadcopter frame.
- Removable landing legs must support the entire weight of the vehicle and lift it at least one inch off the ground.
- Wireless control of the Millennium Falcon quadcopter will be done by communicating via the Arxterra smartphone application supported on both android and apple as well as via bluetooth remote control.
- The Millennium Falcon quadcopter light show must be customizable via Arxterra smartphone application.
- The Millennium Falcon quadcopter will perform designated flight path at the CSULB traffic circle while meeting requirements set by the Federal Aviation Administration (FAA) , Unmanned Aircraft Systems (UAS) and College of Engineering (COE).
- All purchases and services cannot exceed $400.00 with the guidance of project manager and customer approval.
Design innovation:
Below you can see the creative design process used in the creativity exercise.
Creative solution for vehicle protection:

Creative solution for controlling yaw rotation:

Subsystem Requirements:
Product Breakdown Structure (PBS):
Below in the product breakdown structure, all components of focus are outlined with details explaining their purpose.

Electronics System Design:
Wireless Communication
- An RC control will be created to control the Millennium Falcon quadcopter.
- A smartphone application will be implemented to control the Millennium Falcon quadcopter. This application will be compatible with android and apple mobile devices.
Light Show
- Light show must be controlled through Arxterra application.
5th Ducted Fan
- 5th EDF must have enough thrust to counter the yaw rotation.
Battery
- Since 5 EDFs are used this semester, battery must be able to supply power to 5 motors.
New PCB
- All components must lie within the PCB.
System Block Diagram:
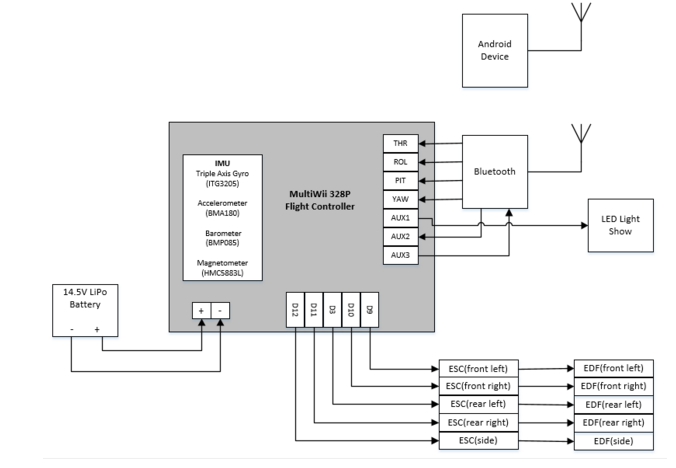
This is the Signal Block Diagram for the Millennium Falcon Quadcopter. To maintain stability during flight, the microcontroller will constantly read data from the sensors and the data would then be analyzed using a PID algorithm. The PID controller would determine how much power to supply to the ESCs to keep the Quadcopter in a stable position. The ESCs are directly connected to the Electric Ducted Fans and will control the speed accordingly. The microcontroller will be setup with a bluetooth module for communication with any mobile device. As an alternative to bluetooth communication, an RF transceiver will be connected to an input pin of the GPIO. A Remote Controller will be designed to communicate with the RF transceiver to control the quadcopter. The advantages of using radio communication instead of bluetooth communication is that radio waves are capable of travelling much longer distances than bluetooth. A 14.5 V LiPo battery will be used to supply power to the device.
Interface Definition:
Resource Map
| MultiWii 328p | Bluetooth | ESC | LED | |
| 1 | 3.3V | Vcc | ||
| 2 | A0 | |||
| 3 | A1 | |||
| 4 | A2 | |||
| 5 | AX1 | Vin | ||
| 6 | AX2(RX1) | RXD | ||
| 7 | AX3(TX0) | TXD | ||
| 8 | AX4/D3 | |||
| 9 | BAT | |||
| 10 | D10 | Front Right ESC | ||
| 11 | D11 | Rear Right ESC | ||
| 12 | D12 | Side ESC | ||
| 13 | D2 | |||
| 14 | D3 | Rear Left ESC | ||
| 15 | D9 | Front Left ESC | ||
| 16 | D13 | |||
| 17 | LCD | |||
| 18 | PIT | |||
| 19 | PSE | |||
| 20 | PWR | |||
| 21 | ROL | |||
| 22 | THR | |||
| 23 | YAW | |||
| 24 | GND | GND | GND |
Based on last semester’s resource map, the pin connections for the components will be similarly placed with addition to the 5th ESC that will be used for yaw control. The LED is moved to Auxiliary Pin 1 to make room for the 5th ESC. Pin layout for the sensors are not needed since they are embedded within the microcontroller.
Manufacturing Design:
Lightshow
- Mount neopixel light ring under the battery casing.
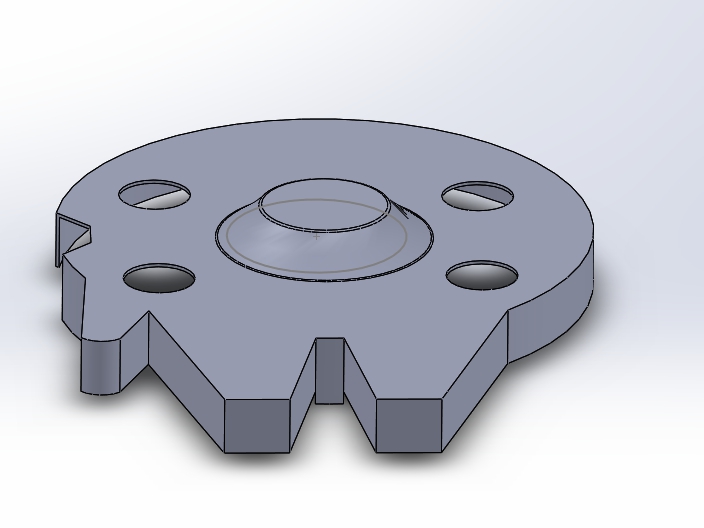
Electric Ducted Fan
- A 5th fan will be purchased and mounted on to the side of the Millennium falcon quadcopter.
- An additional bracket will be designed on Solidworks and 3D printed.
Picture of Electric Ducted Fan (EDF):
Picture of prototype EDF bracket:

Orientation (Alternate solution for yaw control)
- A series of case studies will be performed in order to determine an accurate angle to tilt the ducted fans.
- Additional brackets may be designed and 3D printed if necessary to replace the current ones.
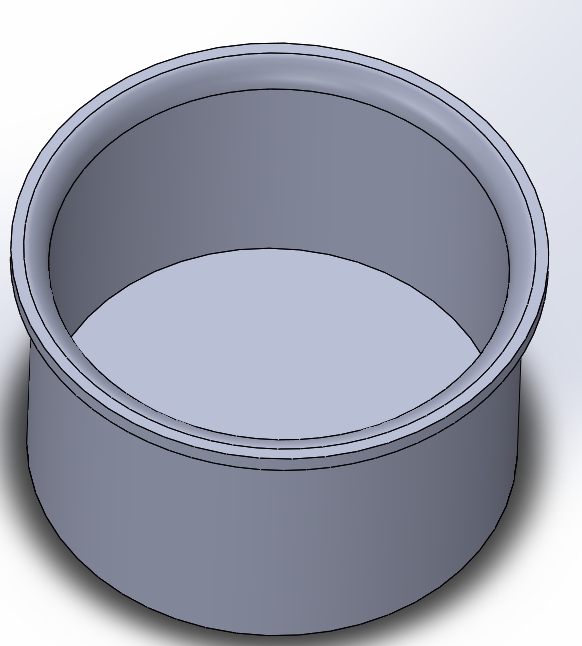
Battery Protection
- A protective case will be designed on Solidworks and 3D printed. The case will be dimensioned to fit the applicable battery which will be used.
- The case will be tested in order to determine if it can withstand impact without damaging the battery.
Picture of battery enclosure prototype:

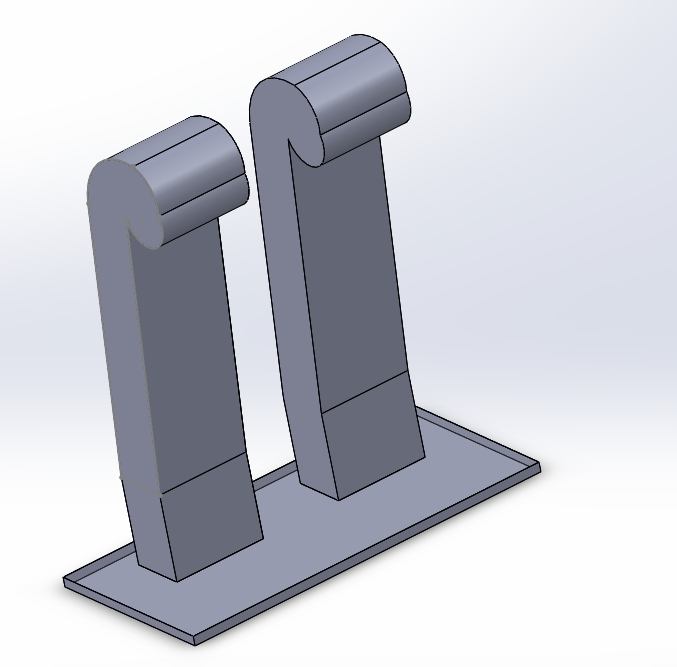
- A lid to close off the battery will be designed using Solidworks and be 3D printed. The lid will be designed to have landing legs added or removed. The lid and legs will be tested if they can support the Millennium Falcon quadcopter.
Picture landing leg prototype:
Printed Circuit Board
- PCB will be laid out and have components properly mounted on.
- PCB shall be mounted on to the current Millennium falcon frame.
Shell Casing
- Shell will be modeled to look the the Millennium Falcon. Techniques used in prior semesters will be used such as using foam to fabricate the mold and then vacuumed. Previous semester reference
- Additional brackets will be designed and 3D printed in order to be added onto the current frame which will serve as mounting brackets for the shell.
- Holes will dimensioned to be bigger in order to make more space for the ducted fans.
- A 5th hole will be cut out in order to make space for the additional bracket and ducted fan.
Picture of Millennium Falcon prototype shell:
Design and Unique Task Descriptions:
Task: Landing Legs must be able to support more than the estimated mass of the quadcopter.
Solution: Manufacture legs of best material in mass and strength combination.
Task: Test wireless control capabilities.
Solution: For bluetooth and RC control, test signal strength for best control.
Task: Power complete quadcopter electronics system.
Solution: Upon quadcopter completion, choose a battery best fit for quadcopter.
Task: Create quadcopter stability during flight.
Solution: Test EDFs thrust capability and trial and error placement and direction of EDF .
Cite references:
- Huynh, Tien-Phuc. “UFO Shell’s Production.” Arxterra. N.p., 6 Dec. 2015. Web. 18 Feb. 2016. <https://www.arxterra.com/ufo-shells-production/>.
- Arechiga, Danny. “Level 1 Requirements.” Arxterra. N.p., 16 Sept. 2015. Web. 11 Feb. 2016. <https://www.arxterra.com/level-1-requirements-4/>.
- Hatori, Ayaka. “Arxterra | Mission Objective and Level 1 Requirements.” Arxterra. N.p., 18 Mar. 2015. Web. 11 Feb. 2016. <https://www.arxterra.com/mission-objective-and-level-1-requirements/>.
- Hatori, Ayaka. “Mission Objective and Level 1 Requirements.” Arxterra. N.p., 8 Mar. 2015. Web. 11 Feb. 2016. <https://www.arxterra.com/ufo-intro/>.
- Vo, Tuan, and Elaine Doan. “Level 1 Requirements.” Arxterra. N.p., 21 Apr. 2014. Web. 11 Feb. 2016. <https://www.arxterra.com/level-1-requirements/>.








{kind=link}