Table of Contents
Field of View Testing for Ultrasonic HC-SR04
By: Daniel Enverga
Test conducted: Monday April 1, 2019 (4/1/19)
Abstract:
On Monday, April 1, 2019. We, of the Gen 7 Pathfinder Chassis team, conducted a test to discover the range of view of the ultrasonic sensors.
Parts list:
- Arduino Mega
- Ultrasonic sensors (attached to front panel)
- Tape Measure
- Ruler
- Easy to move object (Rod)
- Reflective Surface (Printer Paper)
Procedure:
- The first step was determining the furthest distance the Ultrasonic sensors can reach. To accomplish this, we lined up the tape measure from the Ultrasonic Sensors straight ahead, the center line. From here we had one person stand in front of the sensors and observed the Arduino Data Panel to determine the distance of the sensors. The person in front of the sensor would continue to back up from their position until the sensors no longer detected the person. This distance would become the furthest the sensors can detect.
- The next step was determining the amount of left and right view the Ultrasonic sensors can detect. For this, we first determined 7 different points along the center line and from each of these points we had a rod with a sheet of paper taped to it to act as the detectable object. From each of these points, we continued to move right from the center line until the Ultrasonic sensors would read “out of reach.” From here, we used the ruler to determine the distance from the center line to the rod.
- We then repeated Step 2 for the opposite side. After finishing both sides, we then took two additional trials and averaged to get a basis of the field of view.
- We also repeated the experiment to find the amount of vertical view the Ultrasonic sensors can detect. This can be accomplished by rotating the Ultrasonic sensors by 90°. This will change the perspective of test from “left” and “right” view to “up” and “down” or above and below the sensors.
Results:
The following table is the data we gathered through the 3 trials. The first set of data corresponds to the distance from the center line the ultrasonic sensors were able to detect. The second set of data within the parenthesis represents the Arduino reading for the distance in comparison to the actual distance labeled within the top row.
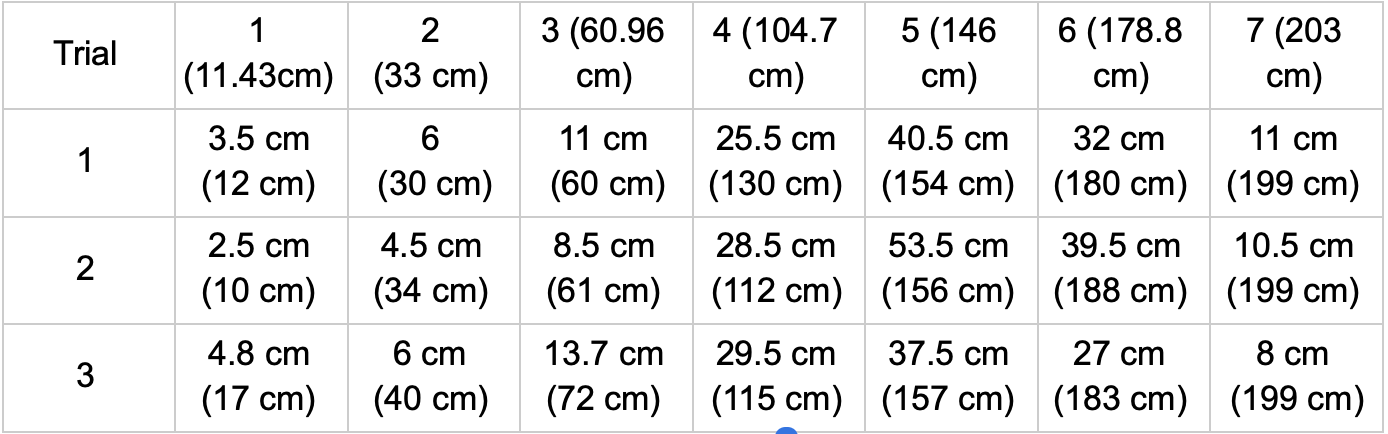
Table 1: Data Measurements for Horizontal Field of View
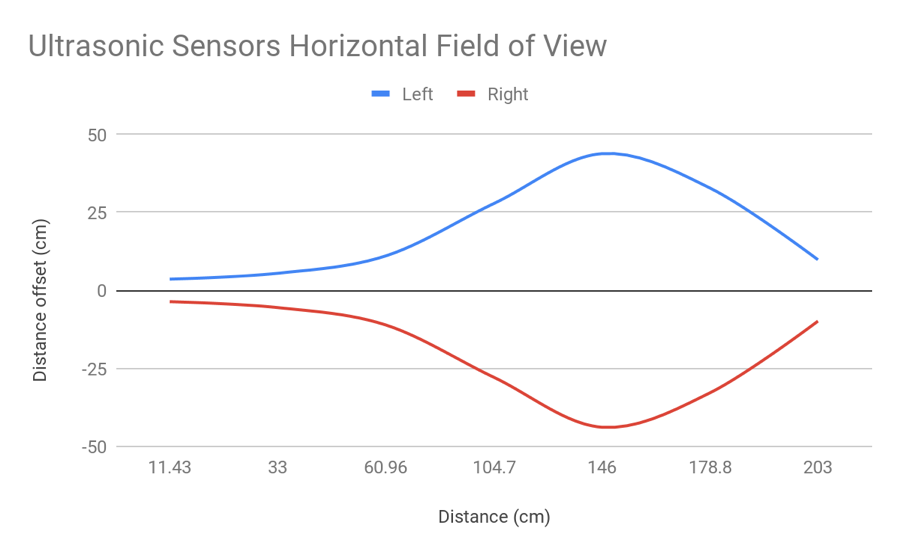
Figure 1: Horizontal Field of View
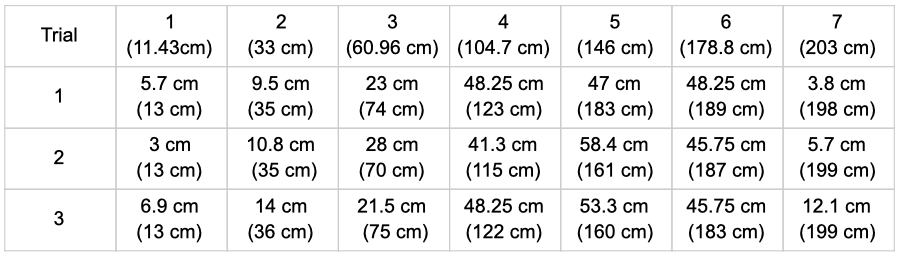
Table 2: Data Measurements for Vertical Field of View
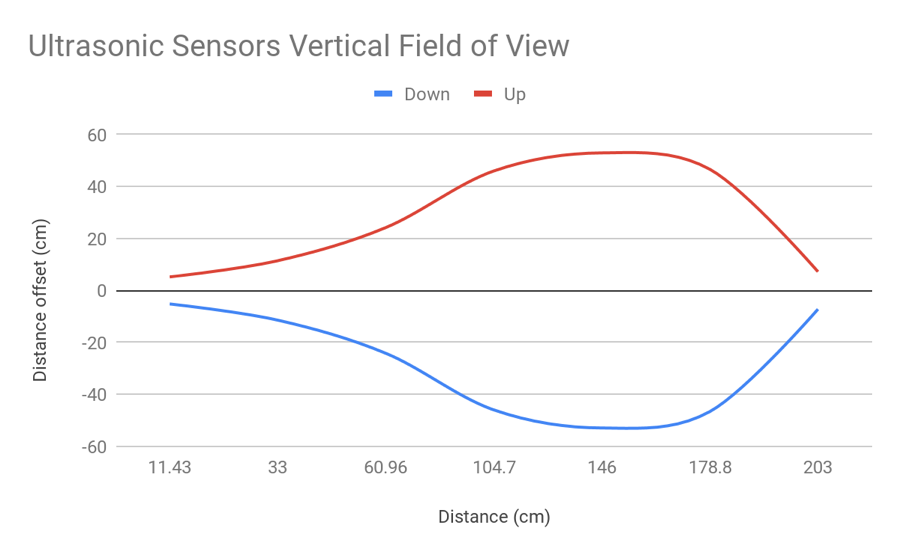
Figure 2: Vertical Field of View
Conclusion:
The Ultrasonic sensors will be able to detect objects between the two lines as we have discovered through this experiment. The cutoff we discovered was any length further than 203 in which the Ultrasonic sensors will read a value of 199. The graphs display what exactly is seen from the ultrasonic vertically and horizontally giving us a better idea of what objects the ultrasonics will be able to detect or not detect and at what distance.