Pathfinder Chassis Spring 2019
Requirements & Verification Test Plan Pathfinder Chassis
Author: Daniel Enverga (Mission, Systems, and Testing)
Approval: Alexandrea Jackson (Project Manager)
Table of Contents
Introduction
The following verification test plan is to verify requirements derived from the mission seen below. Some of these test cases will cover multiple requirements as defined.
Requirements
Level 1 Requirements

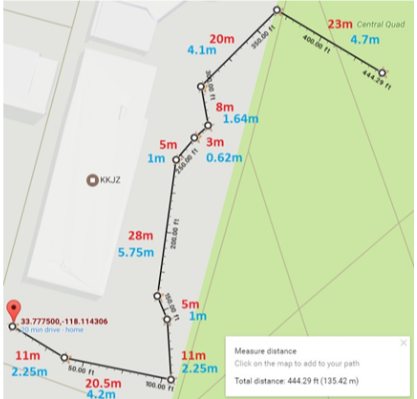
Figure 1: Final Course Outline
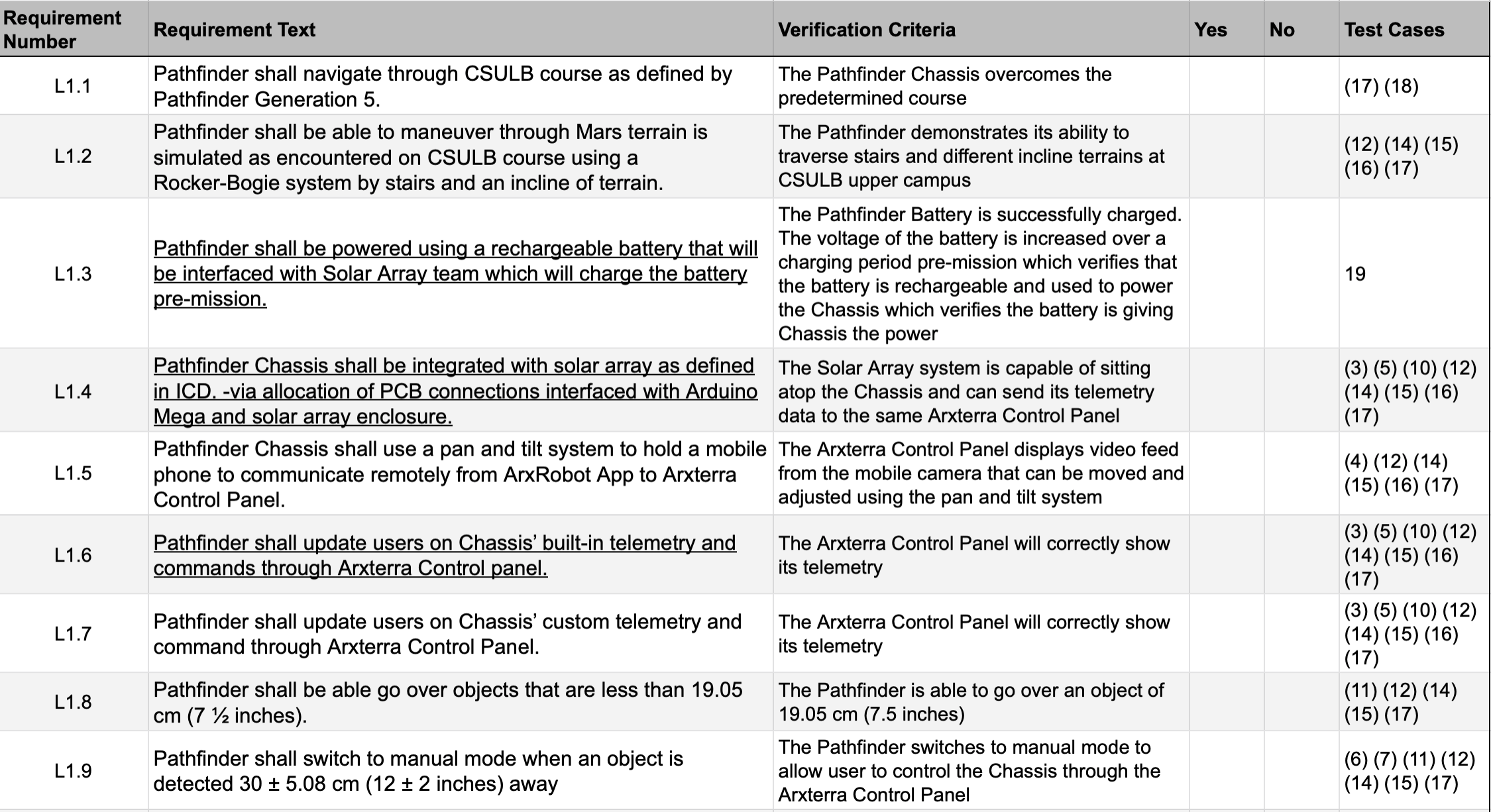
1.1: Pathfinder shall navigate through CSULB course as defined by Pathfinder Generation 5 seen in Figure 1.
{kind=link}
1.2: Pathfinder shall be able to maneuver through Mars terrain is simulated as encountered on CSULB course using a Rocker-Bogie system by stairs and an incline of terrain.
1.3: Pathfinder shall be powered using a rechargeable battery that will be interfaced with Solar Array team.
1.4: Pathfinder Chassis shall be integrated with solar array as defined in ICD via allocation of PCB interfaced with Arduino Mega and solar array enclosure.
1.5: Pathfinder Chassis shall use a pan and tilt system to hold a mobile phone to communicate remotely from ArxRobot App to Arxterra Control Panel.
1.6: Pathfinder shall update users on Chassis’ built-in telemetry and command through Arxterra Control panel such as ultrasonic, battery levels, GPS location.
1.7: Pathfinder shall update users on Chassis’ custom telemetry and command through Arxterra Control Panel such as speed summary and current summary of motors.
1.8: Pathfinder shall be able go over objects that are less than 19.05 cm (7 ½ inches).
1.9: Pathfinder shall switch to manual mode when an object is detected 30 cm ± 5.08 cm (12 inches ± 2 inches) away.
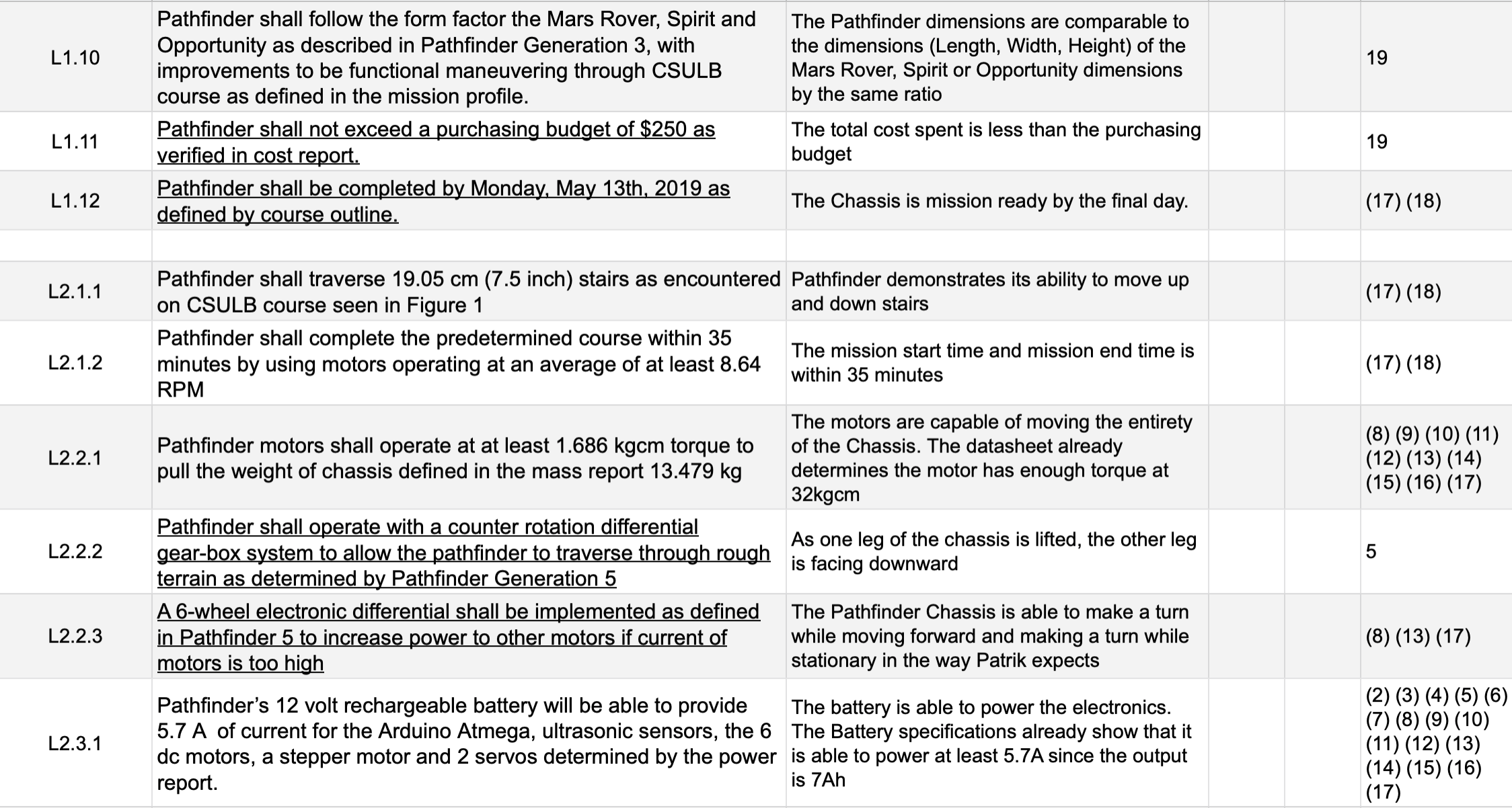
1.10: Pathfinder shall follow the form factor the Mars Rover, Spirit and Opportunity as described in Pathfinder Generation 3, with improvements to be functional maneuvering through CSULB course as defined in the mission profile.
1.11: Pathfinder shall not exceed a purchasing budget of $250 as verified in cost report.
1.12: Pathfinder shall be completed by Monday, May 13th, 2019 as defined by course outline.
Level 2 Requirements
2.1.1: Pathfinder shall traverse 19.05 cm (7.5 inch) stairs as encountered on CSULB course seen in Figure 1.
2.1.2: Pathfinder shall complete the predetermined course within 35 minutes by using motors operating at an average of at least 8.64 RPM.
2.2.1: Pathfinder motors shall operate at at least 1.686 kgcm torque to pull the weight of chassis defined in the mass report 13.479 kg
2.2.2: Pathfinder shall operate with a counter rotation differential gear-box system to allow the pathfinder to traverse through rough, unlevel terrain as defined by Pathfinder Generation 5.
2.2.3: A 6-wheel electronic differential shall be implemented as defined in Pathfinder 5 to increase power to other motors if current of motors is too high.
2.3.1: Pathfinder’s 12 volt rechargeable battery will be able to provide 5.7 A of current for the Arduino Atmega, ultrasonic sensors, the 6 dc motors, motor drivers, and 2 servos determined by the power report.
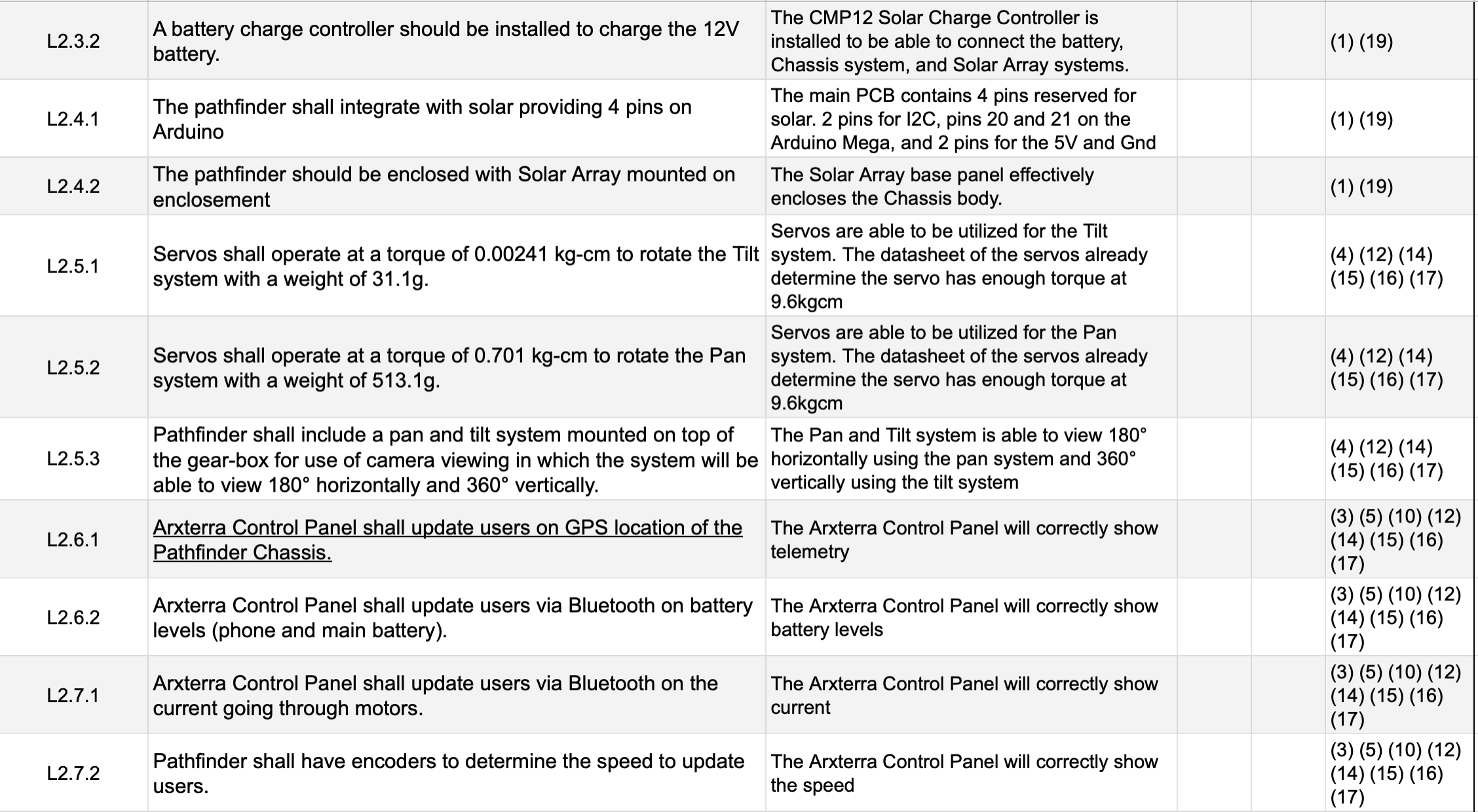
2.3.2: A battery charge controller should be installed to charge the 12V battery.
2.4.1: The pathfinder will integrate with solar providing 4 pins on Arduino.
2.4.2: The pathfinder should be enclosed with Solar Array mounted on enclosement.
2.5.1: Servos shall operate at a torque of 0.00241 kg-cm to rotate the Tilt system with a weight of 31.1g.
2.5.2: Servos shall operate at a torque of 0.701 kg-cm to rotate the Pan system with a weight of 513.1g.
2.5.3: Pathfinder shall include a pan and tilt system mounted on top of the gear-box for use of camera viewing in which the system will be able to view 180° horizontally and 360° vertically.
2.6.1: Arxterra Control Panel shall update users via Bluetooth on GPS location.
2.6.2 Arxterra Control Panel shall update users via Bluetooth on battery levels (phone and main battery).
2.7.1 Arxterra Control Panel shall update users via Bluetooth on the current going through motors.
2.7.2: Pathfinder shall have encoders to determine the speed of the motors displaying summary on Arxterra Control Panel.
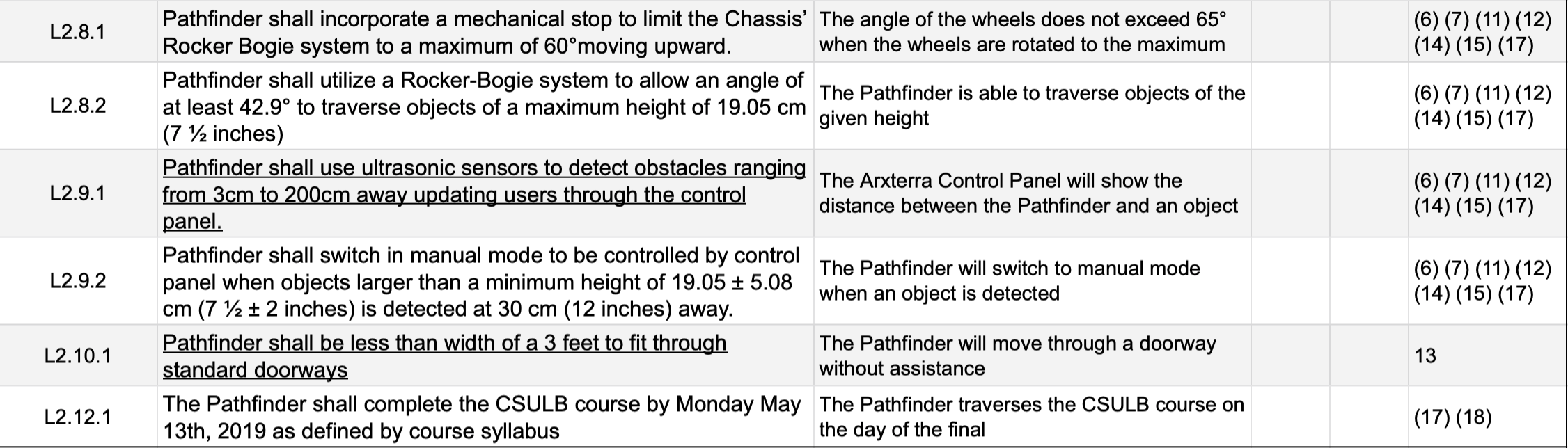
2.8.1: Pathfinder shall incorporate a mechanical stop to limit the Chassis’ Rocker Bogie system to a maximum of 60° ± 3° moving upward.
2.8.2: Pathfinder shall utilize a Rocker-Bogie system to allow an angle of at least 42.9° to traverse objects of a maximum height of 19.05 cm (7 ½ inches)
2.9.1: Pathfinder shall use ultrasonic sensors to detect obstacles ranging from 3cm to 200cm away updating users through the control panel.
2.9.2: Pathfinder shall switch in manual mode to be controlled by control panel when objects larger than a minimum height of 19.05 cm (7 ½ inches) is detected at 30 cm ± 5.08 cm(12 inches ± 2 inches) away.
2.10.1: Pathfinder shall be less than width of a 3 feet to fit through standard doorways.
2.12.1: the Pathfinder shall complete the CSULB course by Monday May 13th, 2019 as defined by course syllabus.
Test Cases
Test Case 1: Chassis Inspection
Requirements to be tested: L2.3.2, L2.4.1, L2.4.2
Assumption: The Pathfinder Chassis is assembled.
Steps to perform test:
- By inspection, the CMP12 Charge Controller is installed.
- By inspection, there are 4 pins in the PCB reserved for Solar Array.
- By inspection, Solar Array Team is integrated with Pathfinder Chassis.
Test Case 2: Bluetooth Verification
Requirements to be tested: L2.3.1
Assumption: The Pathfinder Chassis is assembled.
Steps to perform test:
- Start ArxRobot App on phone and connect to the bluetooth module on the Chassis.
- When connected verify bluetooth connection works by turning on the LED headlights.
- Turn off headlights to verify step 2 was from the ArxRobot App.
Test Case 3: Total Current Test
Requirements to be tested: L1.4, L1.6, L1.7, L2.3.1, L2.6.1, L2.6.2, L2.7.1, L2.7.2
Assumption: The Pathfinder Chassis is assembled and current sensors are working on the motors.
Steps to perform test:
- Use an ammeter to measure current on devices that do not have their own current sensors (servos, ultrasonic sensors, Arduino Mega).
- Compare these reading with the readings from the current sensors telemetry.
Alternative Way:
- Connect ammeter between the battery and the switch to see how much current is coming out of the battery.
Test Case 4: Pan and Tilt Verification
Requirements to be tested: L1.5, L2.3.1, L2.5.1, L2.5.2, L2.5.3
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- Using the Arxterra Control Panel, use the pan function to rotate the pan and tilt system. The pan function should be able to rotate 360°.
- Using the Arxterra Control Panel, use the tilt function to rotate the tilt part of the system. The tilt should be able to rotate 180°.
- Use the Arxterra Control Panel to bring both the pan and tilt function to the home position to verify that both can work at the same time.
Test Case 5: Telemetry of Wheels (Stationary)
Requirements to be tested: L1.4, L1.6, L1,7, L2.3.1, L2,6.1, L2.6.2, L2.7.1, L2.7.2
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- Place Chassis on top of a bucket or an object to keep the Chassis stationary with the wheels off the ground.
- Begin moving forward at max speed.
- The Arxterra Control Panel should update users on the speed throughout the test.
- Differential turning can be tested and other variations of movement.
Test Case 6: Ultrasonic Sensors Isolated Distance Test
Requirements to be tested: L1.9, L2.3.1, L2.8.1, L2.8.2, L2.9.1, L2.9.2
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- Place object (height 7.5 inches, 19.05 cm) at a distance > 30 cm away.
- The ultrasonic sensors telemetry should show the distance from the Chassis accurately.
- A tape measure can be used to verify the distance seen on the Arxterra Control Panel and the object.
- Place the same object at a distance < 30 cm away.
- The ultrasonic sensors should show a distance > 30 cm this will verify the object is no longer detected.
Test Case 7: Ultrasonic Sensors Vertical Distance Test
This test was combined with Test Case 6 in the interest of keeping the isolation tests to a minimal. If needed this test case can be tested by performing Test Case 6 with the object at 30 cm away. This will verify that the ultrasonic sensors detect the object as well as show on the Arxterra Control Panel that an object has been detected.
Test Case 8: Motor Isolated Test
Requirements to be tested: L2.2.1, L2.2.3, L2.2.4
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- While the Chassis is on the ground, move forward for 1 meter.
- Move backwards 1 meter.
- Rotate Chassis full circle to the left.
- Rotate Chassis full circle to the right.
- Move forwards 1 meter then, while still moving forward, begin to make a turn in either direction.
- This will verify the movement of the Chassis as well as the differential turning.
Test Case 9: Watchdog Timer Test
Test Case 10: Simple GPS Test
This test case was not implemented due to the Chassis not being capable of GPS waypoints or waypoint autodrive.
Test Case 11: Manual Mode Switch
Requirements to be tested: L1.8, L1.9 L2.2.1, L2.3.1, L2.8.1, L2.8.2, L2.9.1, L2.9.2
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test
- Place an object of height > 19.05 cm 2 meters away from Chassis.
- Place an object of height < 19.05 cm 1 meter away from Chassis that is wide enough to fit underneath the chassis.
- Allow Chassis to automatically drive forward toward the taller object.
- The Chassis should drive over the closer object and stop when 30 cm away from the further object.
Test Case 12: GPS Movement and Obstacles
This test case was not implemented due to the Chassis not being capable of GPS waypoints or waypoint autodrive.
Test Case 13: Doorway Check
Requirements to be tested: L2.10.1
Disclaimer: This Test Case can be included with Test Case 8 in the interest in time.
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- Place Chassis about 1m away from a standard doorway.
- Drive Chassis through the doorway.
- If Chassis moves through doorway, it verifies the size.
Test Case 14: GPS Left Test
This test case was not implemented due to the Chassis not being capable of GPS waypoints or waypoint autodrive.
Test Case 15: GPS Right Test
This test case was not implemented due to the Chassis not being capable of GPS waypoints or waypoint autodrive.
Test Case 16: Stair Test
Requirements to be tested: L1.2, L1.4, L1.5, L1.6, L1.7, L2.2.1, L2.3.2, L2.5.1, L2.5.2, L2.5.3, L2.6.1, L2.6.2, L2.7.1, L2.7.2.
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- Place Chassis in front of normal sized stairs (Outside ECS, Near Staff Lot by ET, Near the entrance to the library).
- While in manual mode, drive forward to move up the stairs.
- The Rocker-Bogie system should help the Chassis move up.
- Mechanical Stops should prevent the Chassis from flipping over.
- Can also perform test going backwards.
Test Case 17: Predetermined Course
Requirements to be tested: L1.1, L1.2, L1.5, L1.6, L1.7, L1.8, L1.9, L1.12, L2.1.1, L2.1.2, L2.2.3, L2.3.1, L2.5.1, L2.5.2, L2.5.3, L2.6.1, L2.6.2, L2.7.1, L2.7.2, L2.8.1, L2.8.2, L2.9.1, L2.9.2, L2.12.1
Assumption: The Pathfinder Chassis is assembled and connected to Arxterra Control Panel.
Steps to perform test:
- Place Chassis in starting position by the CSULB library as the course defines it.
- Continue to each waypoint by controlling the Chassis in manual mode.
- Throughout the course, telemetry data should be updated.
Test Case 18: Leg-by-Leg
This test case was not implemented due to the repetitiveness of the other test cases verifying the requirements.
Test Case 19:Pre-mission
Requirements to be tested: L1.3, L1.10, L1.11, L2.3.2, L2.4.1, L2.4.2
Assumption: The Pathfinder Chassis is fully integrated with Pathfinder Solar Array.
Conditions: The battery is at most 25% capability (voltage reading of about 12.0V). There is at least 12 hours of sunlight to conduct pre mission time.
Steps to perform test:
-
Verify the CMP12 Solar Charge Controller is installed.
-
Verify Solar Array is using the 4 provided pins on the PCB.
-
Verify the Solar Array is mounted atop of the Chassis.
-
Allow Solar Array to be charging the battery for the allotted time (12 hours).
-
Form Factor can be determined by comparison between the dimensions of the Pathfinder Chassis with the dimensions of the Mars Rovers Spirit/Opportunity.
-
Budget can be verified through the purchase report.
Verification Matrix
Conclusion
This covers the requirements and step by step cases for our verification plan. This is to ensure that our thought process and design for the robot is as expected and desired as originally intended in the mission. Otherwise, this design process will have to go through another iterative process to correct any possible design errors.