{kind=link}
Spring 2016 Velociraptor: Center of Mass
By: Mingyu Seo (M&D)
Introduction:
Humans use center of mass to balance, for example when we are standing on both feet our center of mass would be at the center of our body, but when we try to position or balance on one foot, we shift our body closer to the supporting leg which also shifts our center of mass to find balance. Our team has incorporated this idea to our robot in order to successfully perform both static and dynamic walking. Solidworks can calculate the center of mass and the total mass of our 3D model based on the design and dimension created by the Manufacturing & Design Engineer. Our level 1 requirement shows the robot should be able to complete the course using both static and dynamic walking. In order to successfully complete a static walk, the robot should be able to balance itself on one leg while the other leg takes a step forward. When we’re lifting one leg up it is very important for the center of mass to be as close to the most supported leg to maintain balance.
Method:
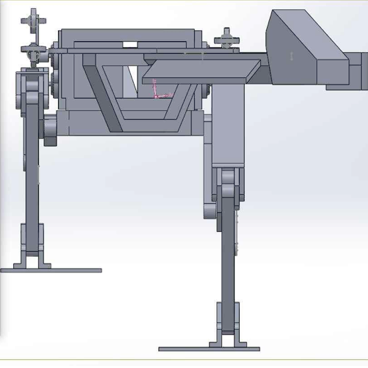
Solidworks can calculate the center of mass by simply changing the position of our robot. When we are performing a static walk, we will lift one leg up and use our head and tail as a counter mass to bring the center of mass closer to the supporting leg. The pictures shown below will explain how the center of mass shifts when the robot takes a step.
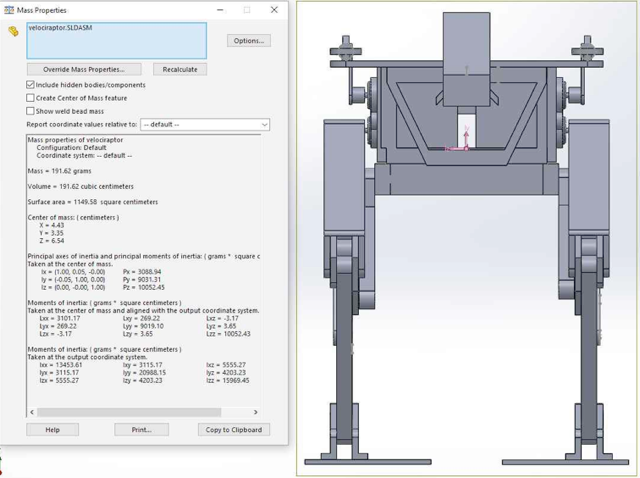
Figure 1: Standing on both feet
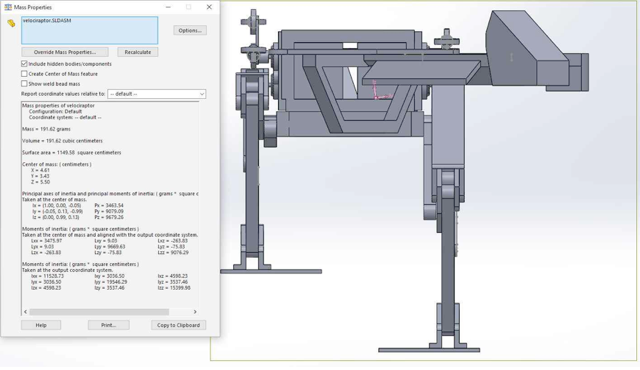
Figure 2: Lifting right leg
Figure 3: Lifting left leg
Figure 1. Shows, when the robot is standing on both feet, we could see that the center of mass (pink dot) is position right in between the two feet. Figure 2. Shows when we lift our right foot, we position our head and tail left in order to create a counterweight for our center of mass to be closer to the supporting leg (left leg). Lastly, Figure 3. Shows when the left foot is up, we would position our head and tail to swing right to move our center of mass closer to the right foot. Figure 2. & Figure 3. Shows that the center of mass hasn’t reached fully above the supporting leg, but this error was caused by the insufficient weight of the head and tail. Our design includes distributing our battery between the head and tail in order to minimize weight load on our body as well as create enough counter weight for our robot to perform static and dynamic walk. For 2016 Velociraptor team, Center of mass testing using Solidworks have helped to validate our Level 2 Requirement (#6) of maintaining balance while performing static walk.