MicroFobo / Spring 2020
Distance Sensor, Rotary Encoder, & Stepper Motor Trade-Off Study
Author: Jeffrey Macahilig
Table of Contents
Introduction
This generation of MicroFobo requires a distance sensor that is able to sense objects at a maximum of one meter, and this module has to precisely obtain data as it scans the area. Unlike previous versions of MicroFobo, this iteration has its head separated from its body. This head will be rotating collecting data with precision and such a task requires a module with a small step angle of rotation to obtain accurate results.
A trade-off study for distance sensors, rotary encoders, and stepper motors was conducted to determine which component would best fit for the robot.
Distance Sensors
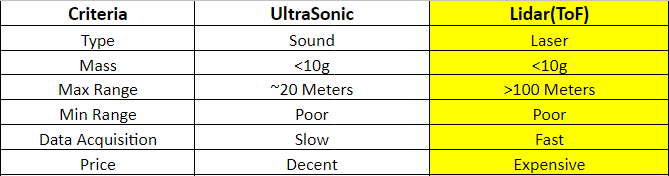
Figure 1: Distance Sensors–Trade-off Studies
Figure 1 is a table comparing the types of distance sensors–Ultrasonic and Lidar. The focused criteria for determining which sensor to be used were mass, range, data acquisition, and price.
Lidar over Ultrasonic
When comparing the two sensors described in Figure 1, the lidar came out to be a better fit for our project. The two sensors both are able to detect objects that are a meter from the scanning location and are about equal in mass; however, the reason for the lidar being more suited was because the lidar can acquire data at a faster rate than an ultrasonic and is capable of obtaining many data points through its scan. A downside to using a lidar sensor for this project is that the price of a unit is expensive compared to an ultrasonic, and this is a possible issue due to a budget constraint.
Rotary Encoders and Stepper Motors

Figure 2: Rotary Encoders and Stepper Motors — Trade-off Studies
Figure 2 is a table comparing a couple rotary encoders with a couple stepper motors. The focused criteria for determining which device to be used were dimensions, mass, operational voltage, degree of step angle, and price.
Rotary Encoder
A rotary encoder is a device that is capable of providing a precise location because each angular position is bound to a specific binary value.
The more expensive rotary encoder, EMS22A30-C28-MS6, has a step angle of 0.35 which meant that with increments of 0.35 degrees the angular position provided by the encoder would correlate to a specific binary number specific to that encoder. This encoder has 1024 pulses per revolution(PPR) which means it is capable of 1024 angular positions. For example, 0.35 degrees could be binary 0000000010, and 0.70 degrees could be binary 0000000101. This would allow for extremely precise detection of objects during a scan.
Stepper Motor over Rotary Encoder
When comparing the devices found in Figure 2, the ELEGOO-28BYJ-48 stepper motor was the best fit for our project. When determining which product to purchase the dimensions, required voltage, mass, angle of rotation, and cost were compared.
Rotary encoders are much smaller in dimension and mass compared to the stepper motors. The smaller the step angle of a rotary encoder the pricier it got, and the cheapest rotary encoder has a step angle of 2.8 degrees. This step angle would not allow for precise acquisition of data, and the other encoder that would provide a sufficient step angle was too expensive when compared to the stepper motors.
The stepper motors are capable of achieving sufficient step angles, but are larger in size and require more voltage. The SY35ST26-0284A stepper motor is capable of a step angle of 0.007 degrees but has a mass of 130g and requirement of at least 7.28 voltage to operate, which is not an ideal pick for the project.
The ELEGOO-28BYJ-48 best suited this project because it was affordable, required at least 5V to operate, had a step angle of 0.087 degrees, and was small enough to fit onto our robot.
Conclusion
The Lidar distance sensor and ELEGOO-28BYJ-48 stepper motor were the two devices chosen for performing the mission objective of MicroFobo. The Lidar is capable of measuring objects up to 100 meters, has a small mass, and can acquire data fast. The ELEGOO stepper motor is capable of operating at 5V, small in mass and dimension, and is capable of rotating at an angle of 0.087.