{kind=link}
IMU Selection
By: Electronics and Control – Kevin Armentrout
Table of Contents
IMU Selection
IMU Selection Criteria
IMU Selection was based off the requirement for angle accuracies to the Hundredth of a degree and the IMU must utilize I2C. For I2C IMUs this left us two option, the MPU 6050 and the LSM9DS1. The LSM9DS1 was the option that the previous semester’s raptor used, and utilizing it caused problems with accuracy. That problem is exacerbated by the fact the LSM9DS1 only supports 2g and 200 degree/s natively. The MPU 6050 supports 2-16g and 2000 degree/s. This led to the choice to use the MPU 6050 rather than the LSM9DS1.
IMU Testing
IMU testing was conducted using Steady State operation, a 20 degree roll, and a 6 degree pitch. After Calibration the IMU produced the following results:
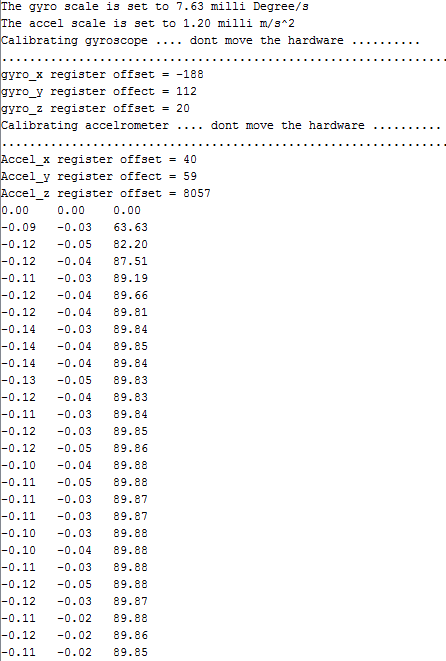
IMU Steady State and Initialization
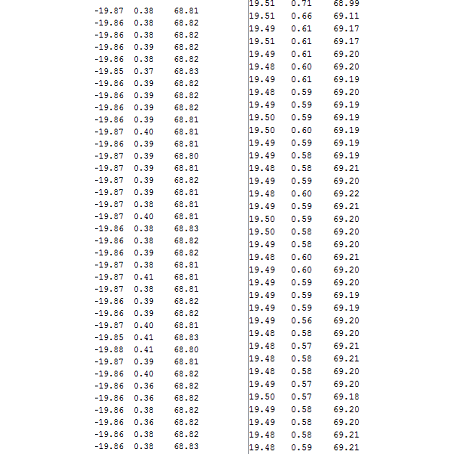
20 Degree Roll Left and Right
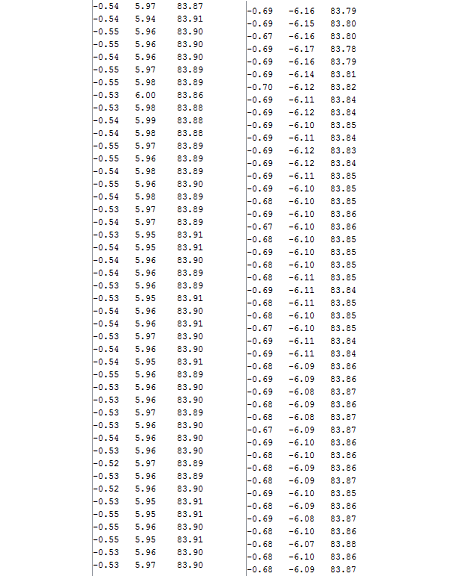
6 Degree Inclination and Declination
Results
The IMU produced the following errors when compared to expected values:
| IMU Testing | |||
| Test | X | Y | Z |
| Steady State | 0.113° (MAE) | 0.02° (MAE) | 0.13% |
| 6 Degree Decline | 0.54° (MAE) | 2.60% | 0.13% |
| 6 Degree Incline | 0.69° (MAE) | 0.65% | 0.14% |
| 20 Degree Roll Left | 0.67% | 0.58° (MAE) | 1.14% |
| 20 Degree Roll Right | 1.13% | 0.40° (MAE) | 1.67% |
The IMU had excellent accuracy when compared to actual values, making it the ideal selection choice for the I2C IMU.