System/Subsystem Design
by Suhyun Kim
System Block Diagram
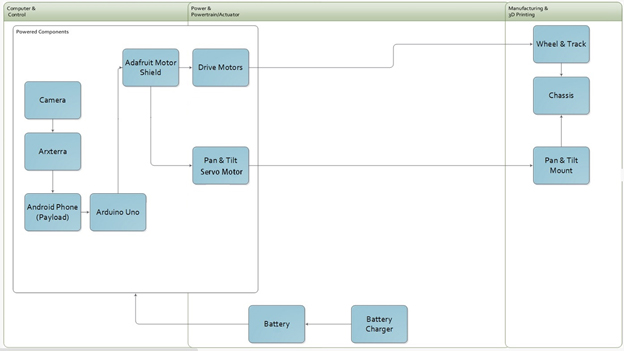
The image above provides an overview of how each component is linked together within the rover.
Camera/Phone:
From a remote location, using the Arxterra interface we will be able to communicate via the phone and camera. The camera will provide an image to the Arxterra interface. Through the phone, we can use the interface to communicate with the microcontroller.
Microcontroller:
The microcontroller subsystem includes an Ardiuno Uno and a Motor Shield. The Uno will be the bridge between the phone and the motor shield. The motor shield is used to control the 2 motors and 2 servos on the rover.
Battery:
The rover will have several batteries. One dedicated battery to power the microcontroller and one to power the motors and servos. The batteries must provide enough power for all of these components until the end of the mission.
Motors/Servos:
The motors will drive the wheels. The motors must provide enough torque to move and enough RPM to fulfill our speed requirement. The servos must provide enough torque to pan and tilt and must provide a range of vision as described in the test plan.