Goliath Spring 2018 – Fritzing Diagram
Written by Milton Ramirez (E&C Engineer)
Verified by Ernie Trujillo (Project Manager)
Approved by Miguel Garcia (Quality Assurance)
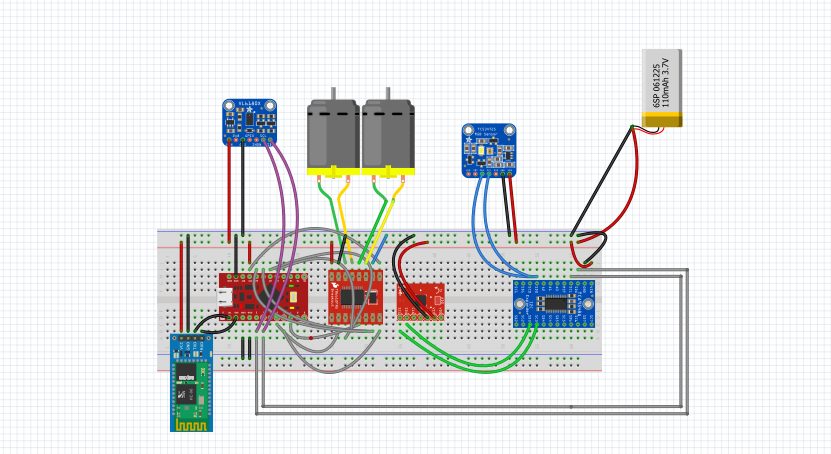
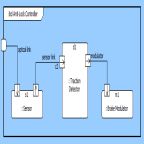
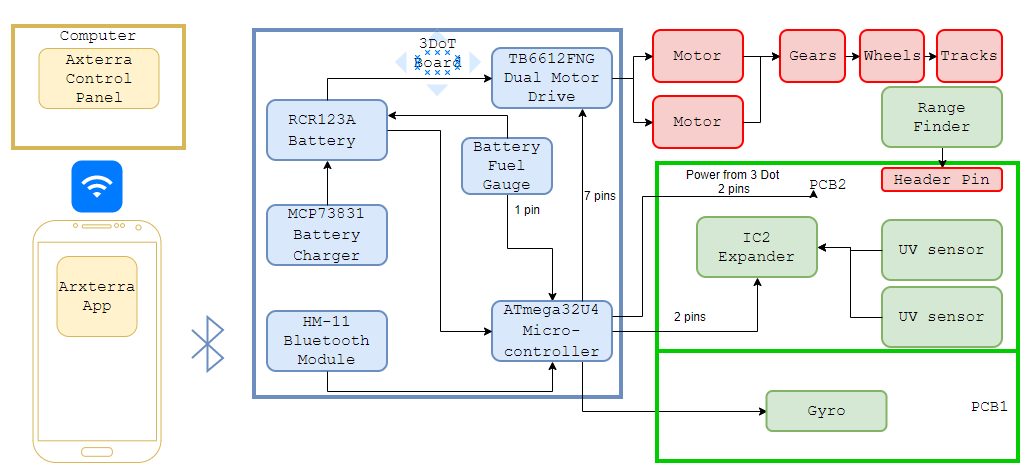
Figure 1 – Fritzing Diagram for the Goliath Tank.
Parts
- Pro Micro
- Motor driver
- Gyro
- Range-finder
- Multiplexer
- Bluetooth
- Color sensor
- Battery
Description
This a prototype of how we will connect the parts we are going to use, but some of these parts might not make the final design. In this prototype, our processor will be the pro-micro instead of the 3Dot board, since Professor Hill is still working on the 3dot board. Also, for that same reason, we will have to use a Bluetooth circuit for our prototype since the 3dot has Bluetooth implemented in it. We will probably have to use this configuration for most of our testing since we won’t get the 3dot until later in the semester. Also, we have a motor driver to control our motors. We are also using a multiplexer for our sensor, which is a Gyro sensor and a color sensor. Then we also have a range-finder, which this and the color sensor are floating outside on purpose, because the color sensor goes in the bottom of the Goliath. The range-finder will be somewhere in the front. Also, the specific part number is not included since that will also change for the last design.
References