By: Raymundo Lopez-Santiago (Mission, System, and Testing)
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
This blog post covers 3DoT Hexy’s Resource Report which include cost, power and mass.Values for the battery and 3DoT board were initially estimated based on the final blog post of 3DoT David. Values for each component or device are updated as the project is further developed.
Resource Reports (Updated March 15, 2018)
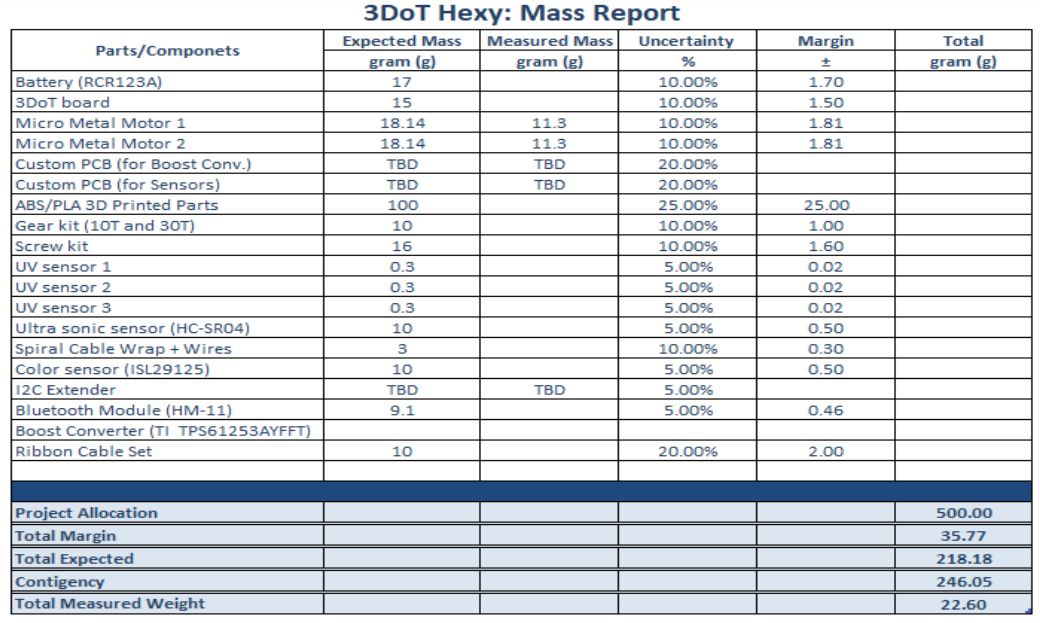
Mass Report Fig. 1: Mass Report
For the mass report, the allocated mass for 3DoT Hexy is 450 grams. This is determined using different weights until the robot operated at 3.7V is no longer able to operate. See blog post (Mass Allocation Post). Most parts/components are measured, but values will be updated as needed. A small home digital scale is used to measure all mass for each part.
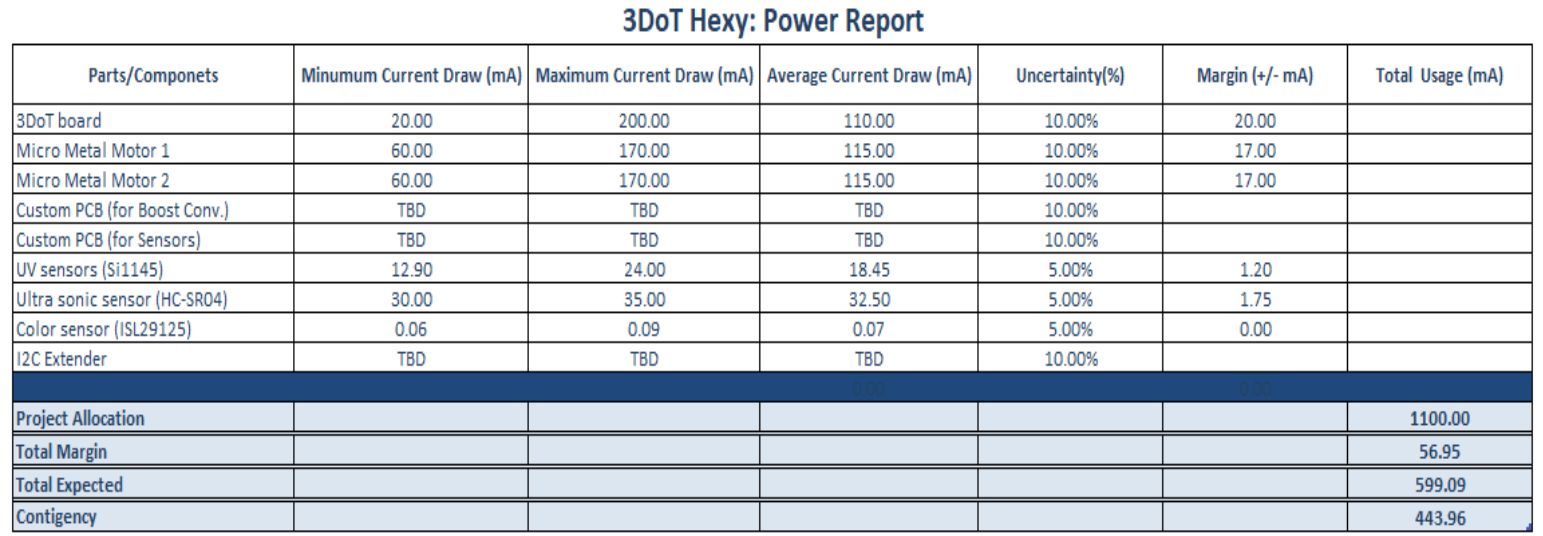
Power Report
Fig. 2: Power Report
For the power report, the allocated current comes from the battery used in this project which is 1100mA. This value is around 85% of the max current able to be supplied from the RCR123A battery. Values are initially estimated based on datasheets for minimum and maximum current draw f
or each device used. The maximum current draw is assumed to be worst case scenario and that is what is used for power estimates for each component. A section is included to compare the total expected current draw obtained from datasheets and total measured current draw. All measurements for current draw are done using a breakout current sensor.
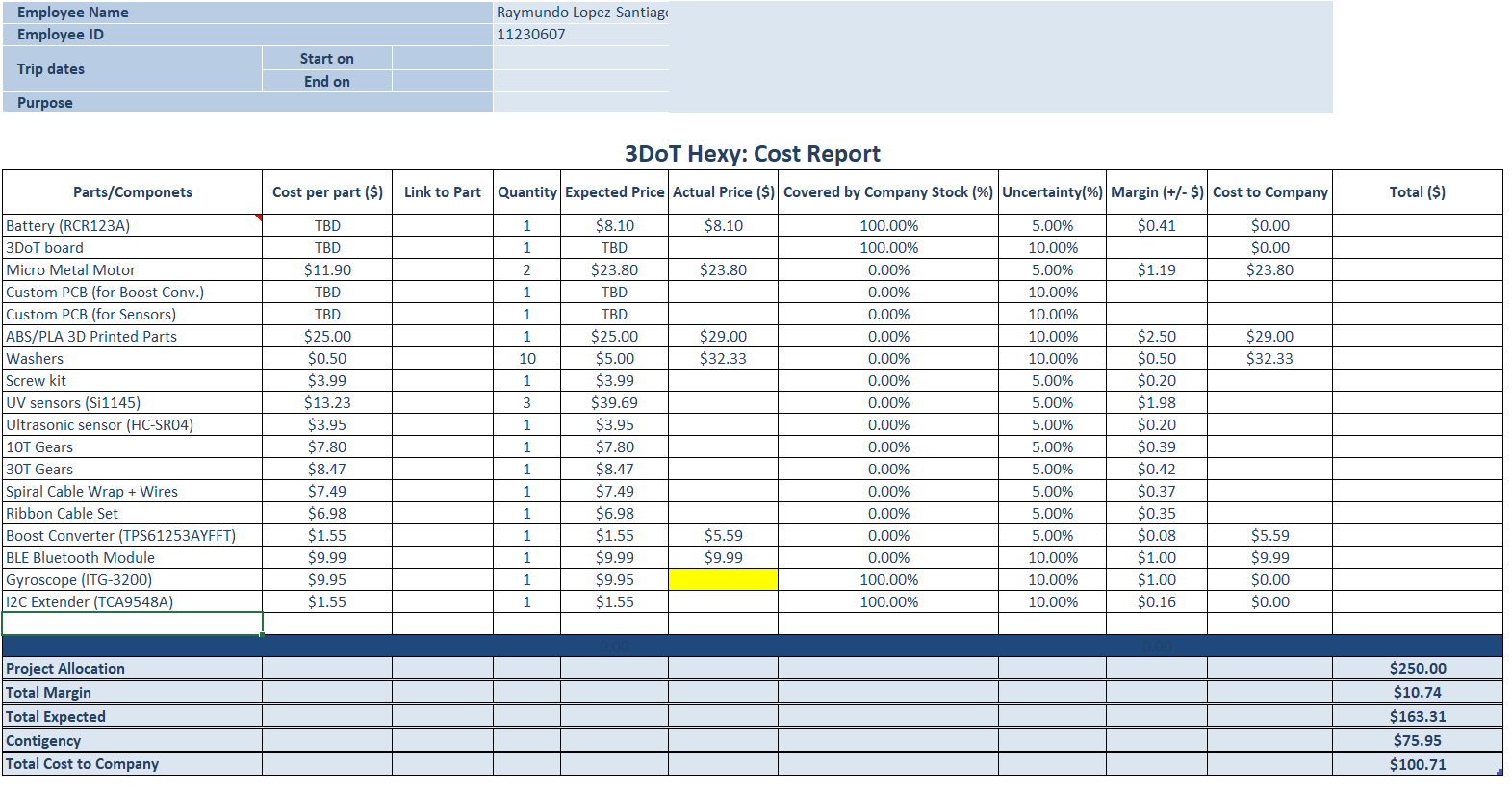
Cost Report
Fig. 3: Cost Report
For the cost report, based on customer requirement our project allocation cost is $250. At the moment we have got approval from the customer to allocate a max of $300 if needed. Most parts are already purchased, but values will be updated as needed. This table is covers all cost per part as well as provides links to all parts. A section added is to include parts covered by company stock. Even though some parts are provided, an expected price for those parts are included in the case someone else needs this information to know the total cost to build this robot. Total cost is broken up into cost covered by The Robot Company and expected cost from purchased parts.
Conclusion
Based on all spreadsheets presented in this blog post, we are in good shape to not exceed any parameters defined for each the cost, power and mass allocation. One recommendation is to start filling out all spreadsheets as soon as possible. Keeping up-to-date documentation will save a lot of time.
https://www.arxterra.com/wp-content/uploads/2018/05/rsz_images.png144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-05-06 19:35:322023-07-27 07:57:12Spring 2018 3DoT Hexy: Resource Report (Cost, Power, Mass)
By: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
The purpose of this blog post is to demonstrate how all parts designed in Solidworks needed to be modified to have a functional prototype. In doing this blog post, we learned that different materials function better than other materials in certain situations. Specifically, in parts that experience a lot of movement and contact with adjacent parts.
Related Requirements
Level 1 Requirement
In order to minimize manufacturing cost, and packaging cost the robot shall be able to be constructed from subassemblies within 10 minutes.
The robot shall incorporate 3D printed parts to demonstrate the feasibility of the 3DoT board for 3D printed robots.
Improving Prototype Design (May 07, 2018)
After designing and testing our prototype, we saw that there were many areas that we could improve upon to make our design better. Areas such as the gear holding system and our gear-to-femur joints needed to be re-evaluated due to customer concerns with the prototypes design. Among other things, we also saw that most testing with the prototype was done flawlessly between 4.5 to 5V. However, due to the unavailability of the booster shield due to design constraints discussed in “Spring 2018 3DoT Hexy: Booster Shield Layout” . We will have to operate 3DoT Hexy at the battery rating of 3.7V. In order to achieve the same performance we were getting at 4.5-5V with 3.7V we will have to re-evaluate our current design and minimize friction between moving parts as much as possible. The professor had multiple ideas to make this possible, as well as other ideas to make our design better. Among them, the most promising ideas were to add bearings into the gear shafts, and add bushings to the gear-to-femur joints. Below are implementations of these suggestions, as well as other solutions we came up with to improve the performance of our design.
Modifications to our Cam System
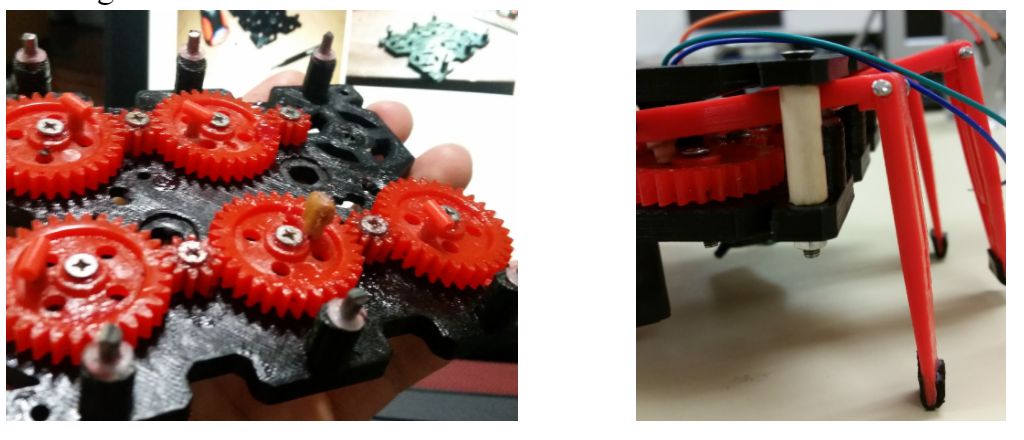
In order to improve our gear design’s performance at 3.7 V we decided to integrate bearings into the bores of our gear. This should improve performance while at the same time addressing one of the customers concern over the current machine screw design. The main issue addressed by the customer, was bore warping in the gears due to the machine screw thread being in contact with the plastic gear bore. We decided to integrate 3 mm x 6 mm x 2.5 mm bearings to the gear bores, which we outsourced from VxB bearings.
Figure 1: 3 x 6 x 2.5 mm bearings
How we did it
The bearing’s outer diameter was bigger than the bore diameter of the gears, so what we did was use a drill press to resize the bore holes. For better fitment, drilled boreholes were sized to the outer diameter of the bearings and forced in using a plastic hammer. We did this for all the gears.
Figure 2: Installing bearings to gears
The gears were attached to the chassis of our spider using 16mm flat head machine screws, brass bushings, washers, and nylon lock nuts.
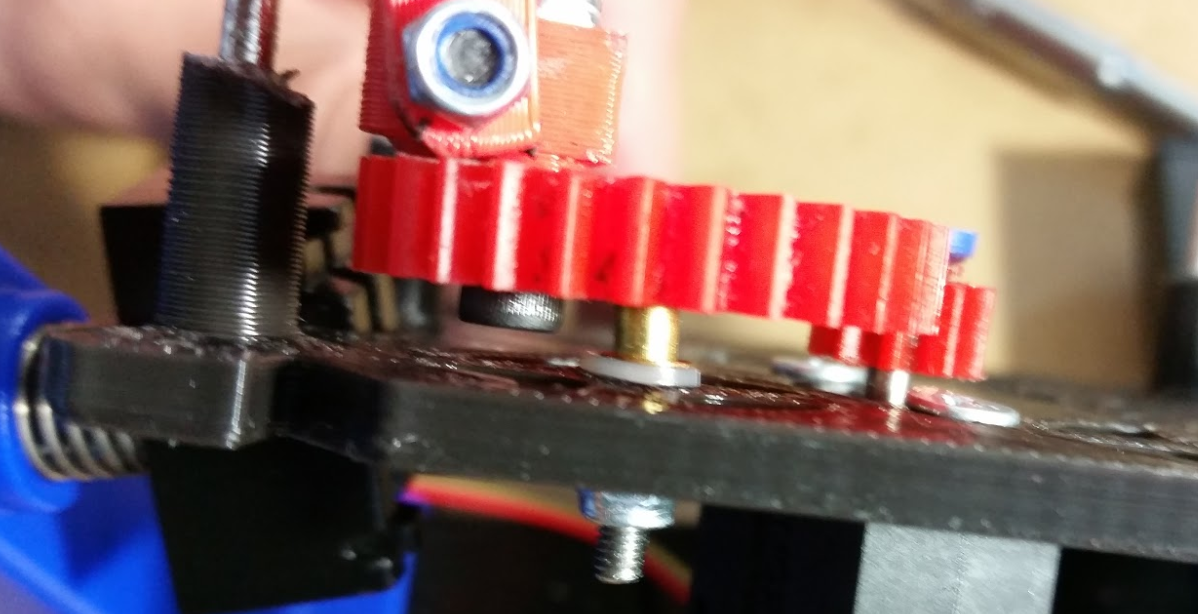
Figure 3: Gear Assembly
Figure 4: Gear Assembly
From the above figure, we can see that the brass bushing is used to pinch the bearing’s inner ring allowing only the outer ring to rotate.
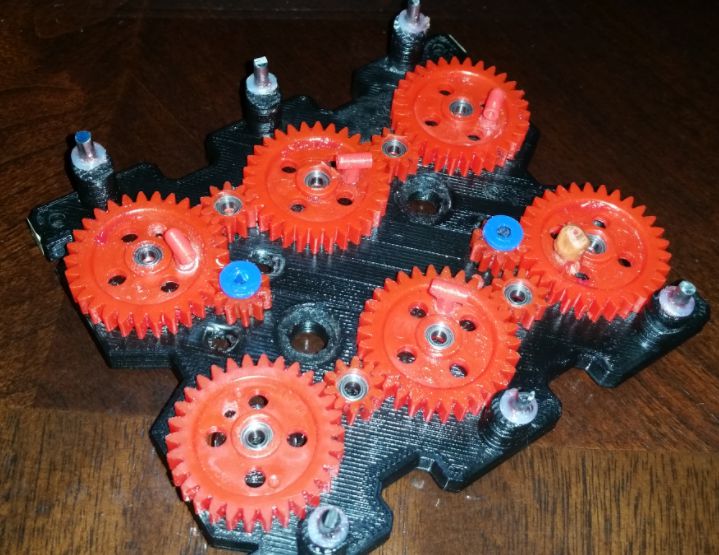
Figure 5: All bearings installed
Modifying our Gear-to-Femur Joints
The gear-to-femur joint design in our prototype was very flimsy due to having too much play. This play was coming from using cotter pins and from using screws to hold the joint to the gear. A solution the professor had was to add bushing to the holes and run machine screws and lock nuts to make a more sturdy joint. Manufacturing decided to pursue this solution because implementing this design solution would enables us to control the amount of play required to run our robot at 3.7 V. Nevertheless, implementing this solution requires redesigning the joint as shown below.
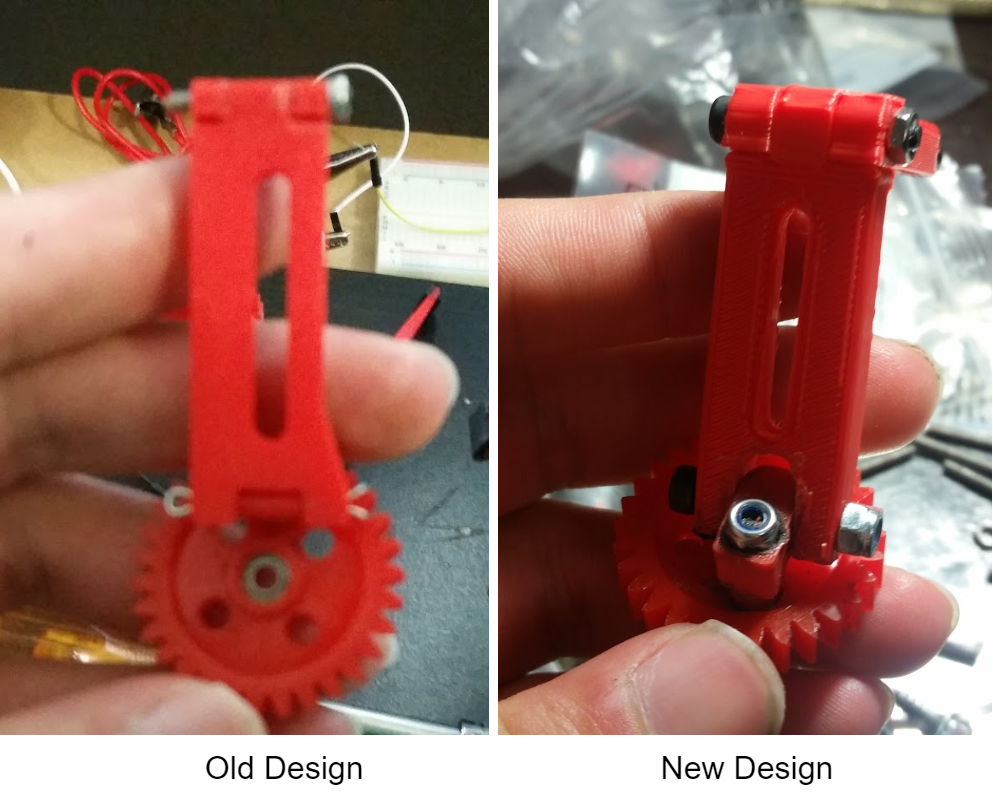
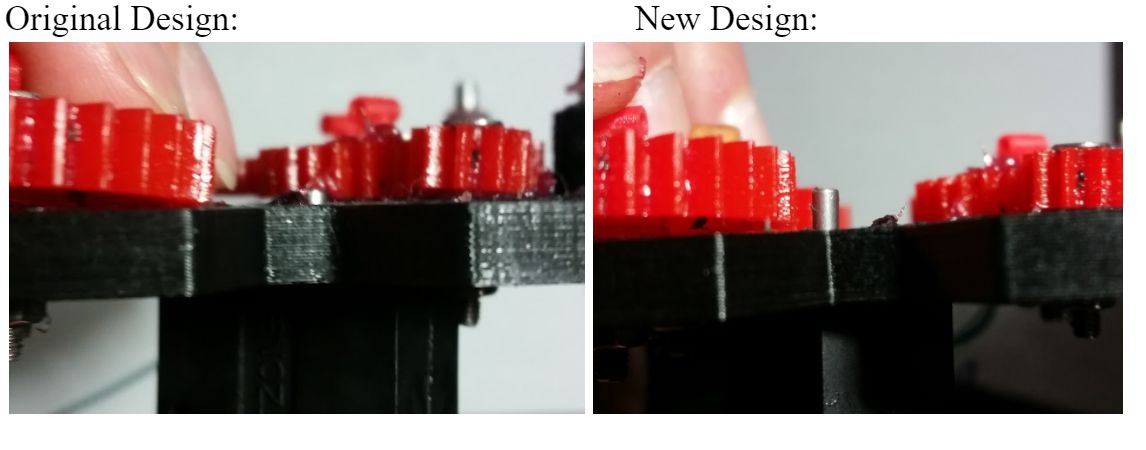
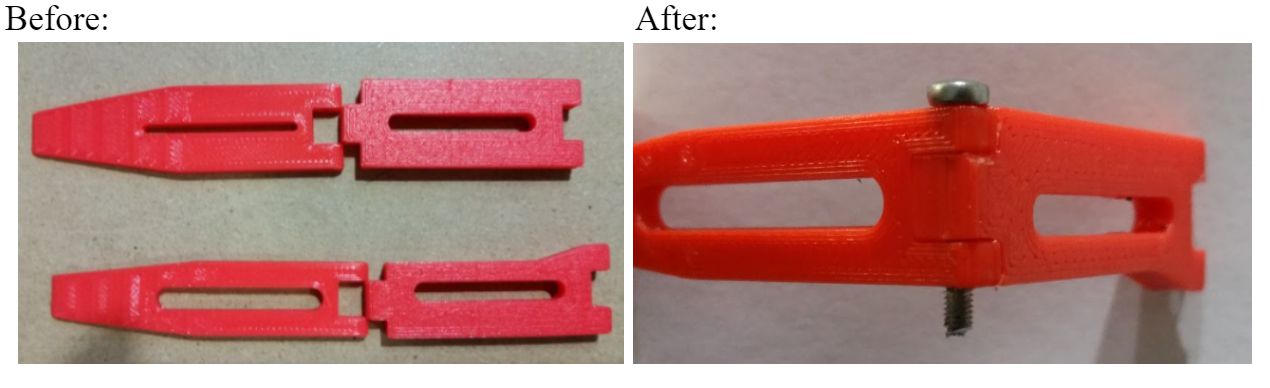
Figure 6: Old vs New Joint Design
Figure 7: Closer look at old vs new joint
Dimensions for the new joints can be found by clicking here.
As can be seen above, the new design will have individual holes to provide the 2 degrees of freedom required by our design. Very small aluminum bushings were inserted into these joints. As advised by the professor, Mcmaster carr was the best place to go to find these bushings. However, due to being unable to find the desired specifications for the inner and outer diameter for the bushings (3 mm ID, 4mm OD), time and cost. The manufacturing department decided to make them himself since he has had experience in the past shaping metal. Using an aluminum sheet, the manufacturing engineer was able to make aluminum bushings that would fit into the hole of the joints within a few hours for testing.
Figure 8: Making Aluminum Bushings
As shown above, making aluminum bushing is pretty easy, if you have the right tools. First,cut a piece of aluminum to the required perimeter length (C=2*pi*r). Second, shape the small sheet of aluminum into a tube using an aluminum rod and pliers. Three, cut excess material using wire cutting pliers or a dremel (if you have access to one). Sand and polish the tubes to remove all dents and to smooth the material.
Below is the final assembly of our new design. As can be seen the design looks more sturdy than our old design, because it is. The new joints are definitely much less flimsy than the old design, and can be adjusted by tuning the cap screws to the amount of play desired for best performance.
Figure 9: Final Assembly
Prototype Part Adjustments/Modifications (April 05, 2018)
All components mentioned in our 3D model blog post, for Hexy Mk-01, were fabricated using a 3D printer. Parts that needed to be modified were fixed using a power drill and a Dremel tool for: cutting, grinding, sanding, and shaping the material.
Figure 10: Power tools used
Chassis
Bottom Plate
Removed all shafts
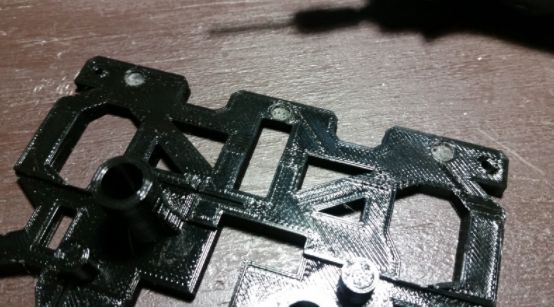
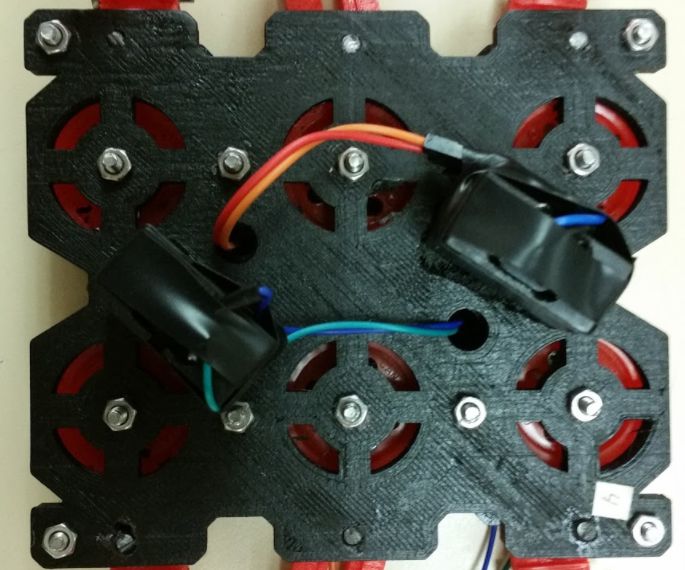
We removed all shafts from the bottom plate design because 3D printed. 3 mm shafts were very thin and fragile. The manufacturing engineer would have to constantly glue on the broken shaft pieces. A better solution for this is making 3 mm holes at the shaft positions and inserting 3 mm stainless steel rods for the leg guides. Similarly, gear holder shaft were replaced with 3 mm holes and will insert machine screws and nuts to hold the gears down. We also increased diameter of the wire holes by 2 mm using a dremel tool. Therefore, in the Solidworks file revision, all shaft extrusions will be converted to holes.
Figure 11: Replacing all shafts with holes
Added spacers to the base of all the leg shafts
This was done in order to raise the overall height at which the legs would rise.
Figure 12: Added white spacers to shafts
Made holes for motors on the underside of the bottom plate
3 mm holes for motor boxes on the underside of bottom plate were added. This was done because the thickness of the bottom plate was preventing the motor shafts from having a good contact with the gears they connect too. Future revision of Solidwork files will require reducing the thickness of the bottom plate.
Figure 13: Adding holes to underside of bottom plate
Figure 14: Left – original shaft clearance, Right – new shaft clearance
Top Plate
Modified Resting holes for leg guide shafts
The resting holes for the leg guide shafts were too small, so we had to increase the diameter of them by approximately 1.5 mm using a dremel tool.
Figure 15: Modifying top plate holes
Legs
Femurs
Sanded femur joint to tibia
Due to making the dimensions of the joint between femur and tibia the same size in both ends, mating the femur to the tibia was not possible. Therefore, the femur insert had to be sanded down using a dremel to enable the femur and tibia to mate correctly.
Figure 16: Before and after images of mating leg joint
Modified femur-to-gear joint junction
The edges on the underside of femur-to-gear joint junction were rounded. This was done because this end would tend to get stuck on the screw during rotation of the gear. We also increased the diameter of the hole to 2.5 mm in order to easily insert cotter pins
Figure 17: Modified femur edges and hole
Tibias
Adding grip
The tibia designed would bond easily to femurs after femur joint was modified. The only issue discovered was that the current design of having plastic tips would make Hexy susceptible to sliding while walking. Therefore, we decided to glue thin 10 mm x 5 mm x 2 mm pieces of rubber to the tips of the legs to increase the grip Hexy will have while walking.
Figure 18: Adding grip to tips
Femur-to-Gear Joints
Sanded junction between gear joint and femur
The same issue we had with the femur-to-tibia junction came up with the femur to gear joint. The dimensions of both mating points were designed with the same measurements causing them to not fit together as they should. The solution was to sand down the junction between the joint and the femur for better fitment.
Figure 19: Adjusting gear joints for fitment
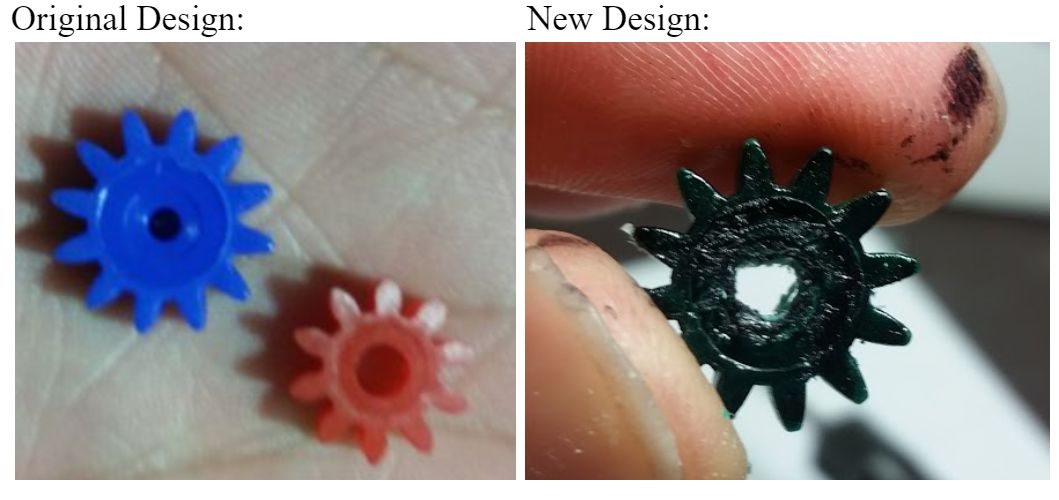
Modified Gears
Added 2 mm holes on the gears in order to insert the screw that will hold the femur-to-gear joint in place.
Figure 20: Adding hole to gears
Testing Alternative gear-to-femur joint solutions
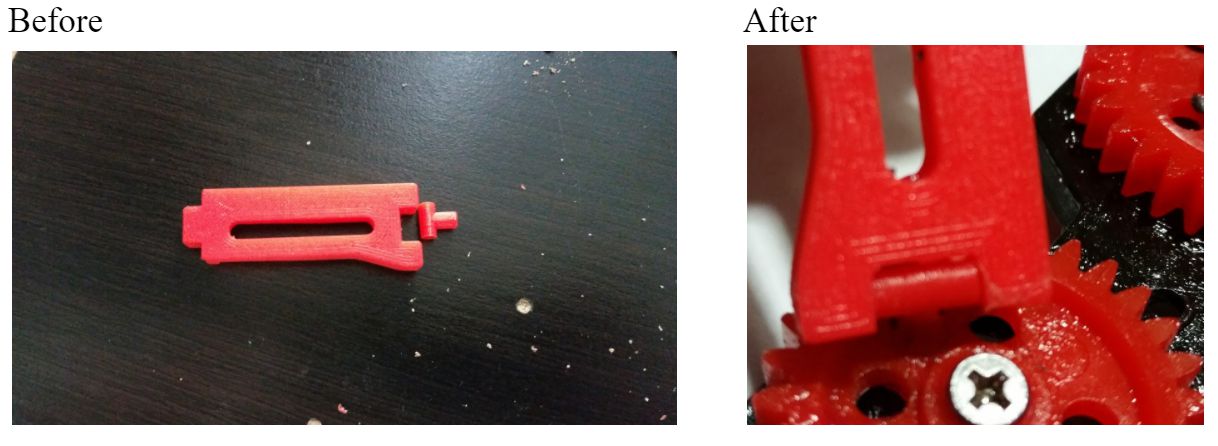
The current joint design was not very reliable. Do to the thin design of the borehole walls (where the screw is to be inserted), the joint would split open when a screw would be inserted. Liquid glue had to be added to the joint to hold it in place. Two solutions proposed by the manufacturing department were to either: redesign the joint and 3D print one with thicker borehole wall, or make them out of more durable materials, such as wood. Below is an image of a wooden joint fabricated by the manufacturing engineer. We will attempt to redesign joints to look like the wooden sample which is thicker. We might even try 3D printing them for easy manufacturing. If 3D printing these joints doesn’t work we will make them out of wood.
Figure 21: Two types of gear-to-femur joints
Spacers
Four 20 mm spacers were fabricated out of wood tubes for this prototype and will be replaced by nylon spacers in a future revision.
Figure 22: Wooden spacers
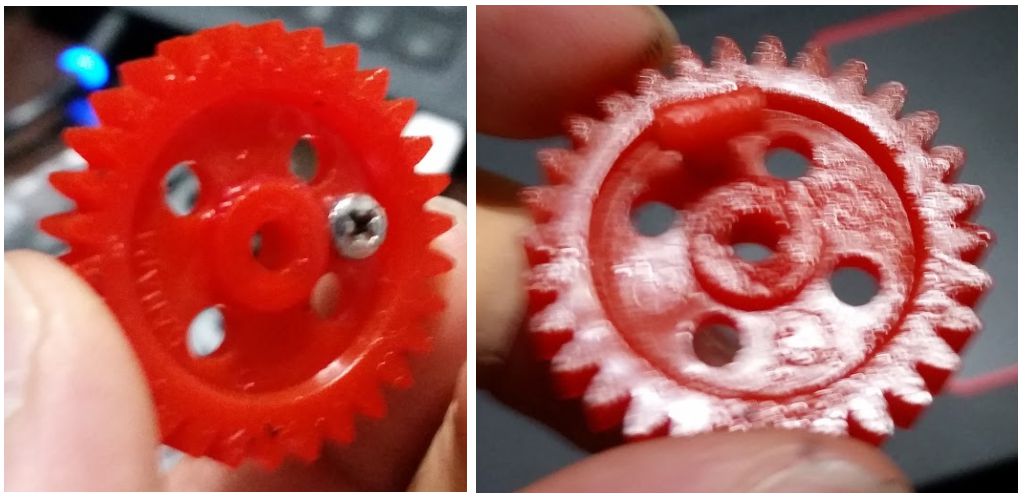
Driving Gears
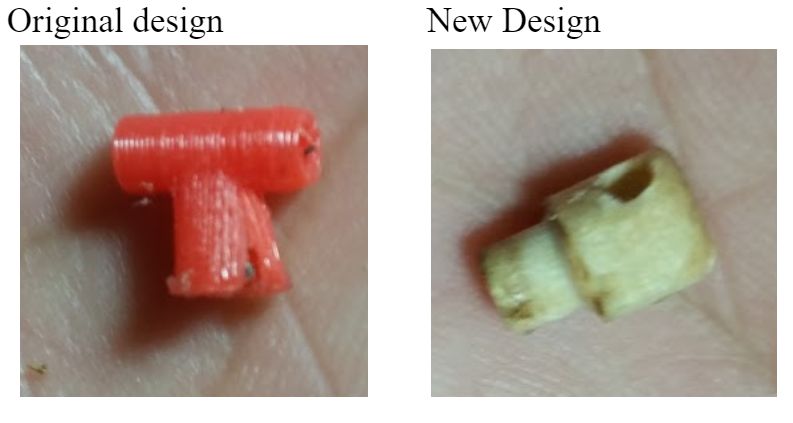
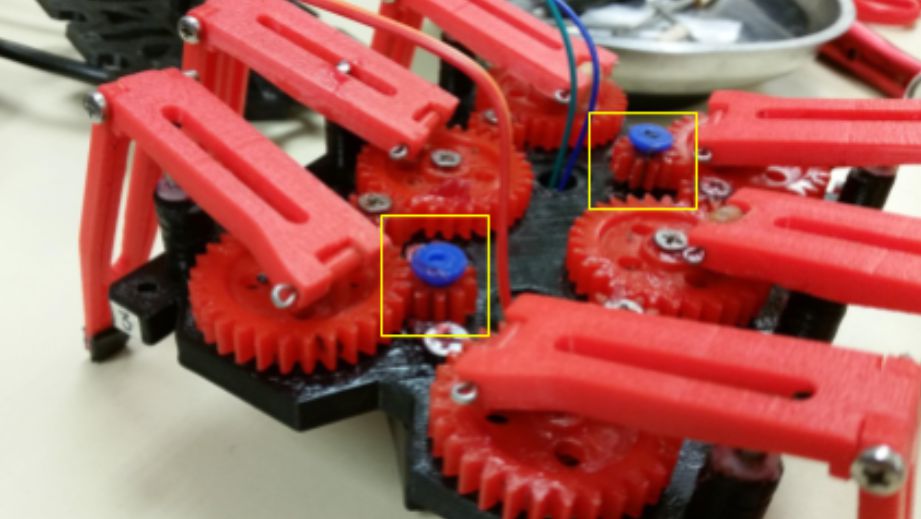
Our plan for making the connection between the 10T driving gears and the motor shaft is to do one of the following:
Insert a bushing to 10T Ajax gears to compensate for the different bore diameter of the Ajax gears and the diameter of the gear shaft.Figure 23: Method 1
Purchase 10T gears with a smaller bore diameter and shape a D that matches that of the gear motor shaft. This is done to lock the gear to the motor shaft while spinning. Figure 24: Method 2
Conclusion
Both designs have been built and tested. From the test we saw that both methods work the same and don’t differ in performance when driving the motion of the cam system. We will use method A due to having the same gear color as the rest of the cam system, as well as for providing the least amount of play when inserted to the motor shaft. We will use method B as a backup in case we have issue with method A later in the design.
https://www.arxterra.com/wp-content/uploads/2018/04/rsz_15.png144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-05-06 19:24:592023-07-27 07:57:12Spring 2018 3DoT Hexy: Prototype Part Adjustments/Modifications
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
The purpose of this blog post is to introduce the different types of motors that are at our disposal. We will compare and contrast each type of motor, and conclude the post with a final decision on which type of motors are best suited for our Spiderbot design.
Brushed DC Motor
Is used commercially in toys and also in industrial use. Inside are brushes that rub on a copper ring so that current goes through the coils as the motor spins while surrounded by positive and negative magnets.
Pros: Inexpensive and lightweight.
Cons: Very electrically noisy, needs extra circuits and connections for controlling, an difficult programming for small movements.
Figure 1: Brushed DC Motor
Brushless DC Motor
These motors are close to the brush motors except that they don’t make as much noise as them. These are use in fans, drones or multicopters.
Pros: Quiet
Cons: Needs extra connection and circuit to control the motor.
Figure 2: Brushless DC Motor
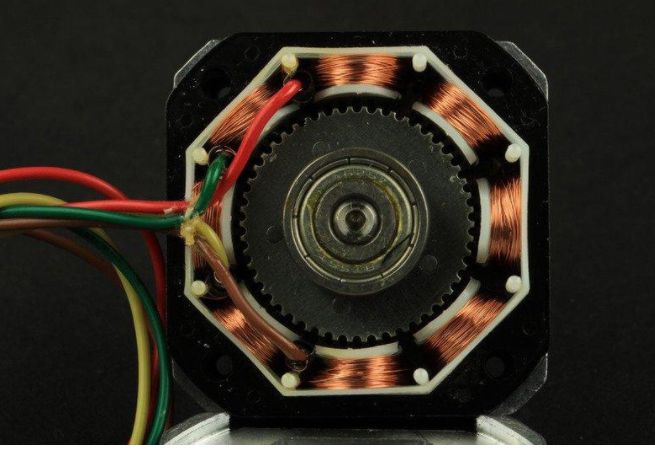
Stepper Motors
Is a motor that moves in steps unlike the brushed and unbrushed DC motors. Since it moves in steps it has precision control. It is used in 3D printers, robotics and printers.
Pros: Precise repeatable positions, speed control, great low-speed torque and great ‘holding torque.’
Cons: Low efficiency, needs encoder for reference and needs extra circuit board to use on Arduino.
Figure 3: Stepper Motor
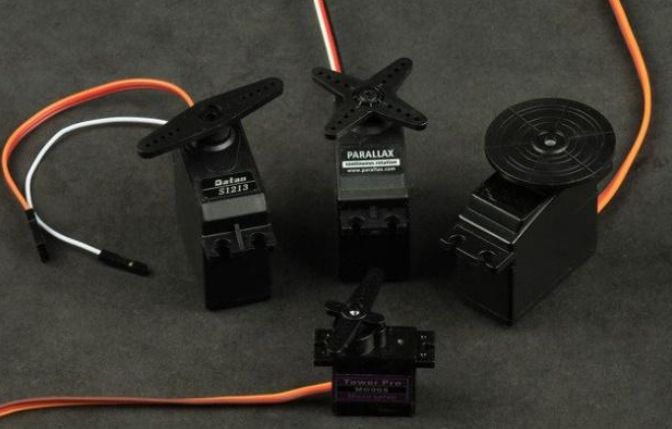
Servo Motors
Is a motor that uses negative feedback to control motor speed or position. They use very precise motion control. These are the most commonly used in electronics. Used for robotics, animatronics and electronic cars, boats or planes.
Pros: Low cost, variety and simple to control.
Cons: Limited range of motion goes from 0-180 degrees can become jittery if trying to hold a position.
Figure 4: Servo Motors
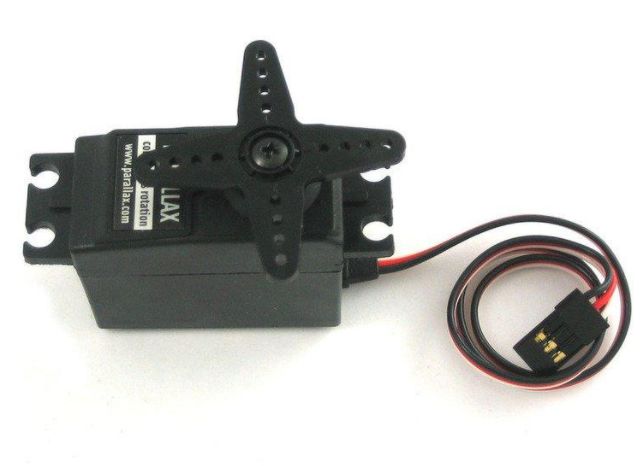
Continuous Rotation Servos
Are similar to the normal servo motors except that it has more mobility it can go 360 degrees and go in reverse. It contains a built in H bridge so no extra circuits were needed. Used in robot drive trains.
Pros: Inexpensive, small and easy to control
Cons: Not designed for large loads.
Figure 5: Continuous Rotation Servo Motor
Final Decision
Micro-motors
Figure 6: Micro-motors
We decided to use a micro brushed motor for our design. This is due to 3DoT David using the same type of motor. Their motor trade off study shows we will use the 3.7V 50,000 RPM Small Colorless Motor 716. These motors are extremely cheap at $1.95 each compared to $10-20 for servo motors.
https://www.arxterra.com/wp-content/uploads/2018/05/rsz_11.jpg144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-05-06 19:22:522023-07-27 07:57:12Spring 2018 3DoT Hexy: Decision on Motor Type Selection
By: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
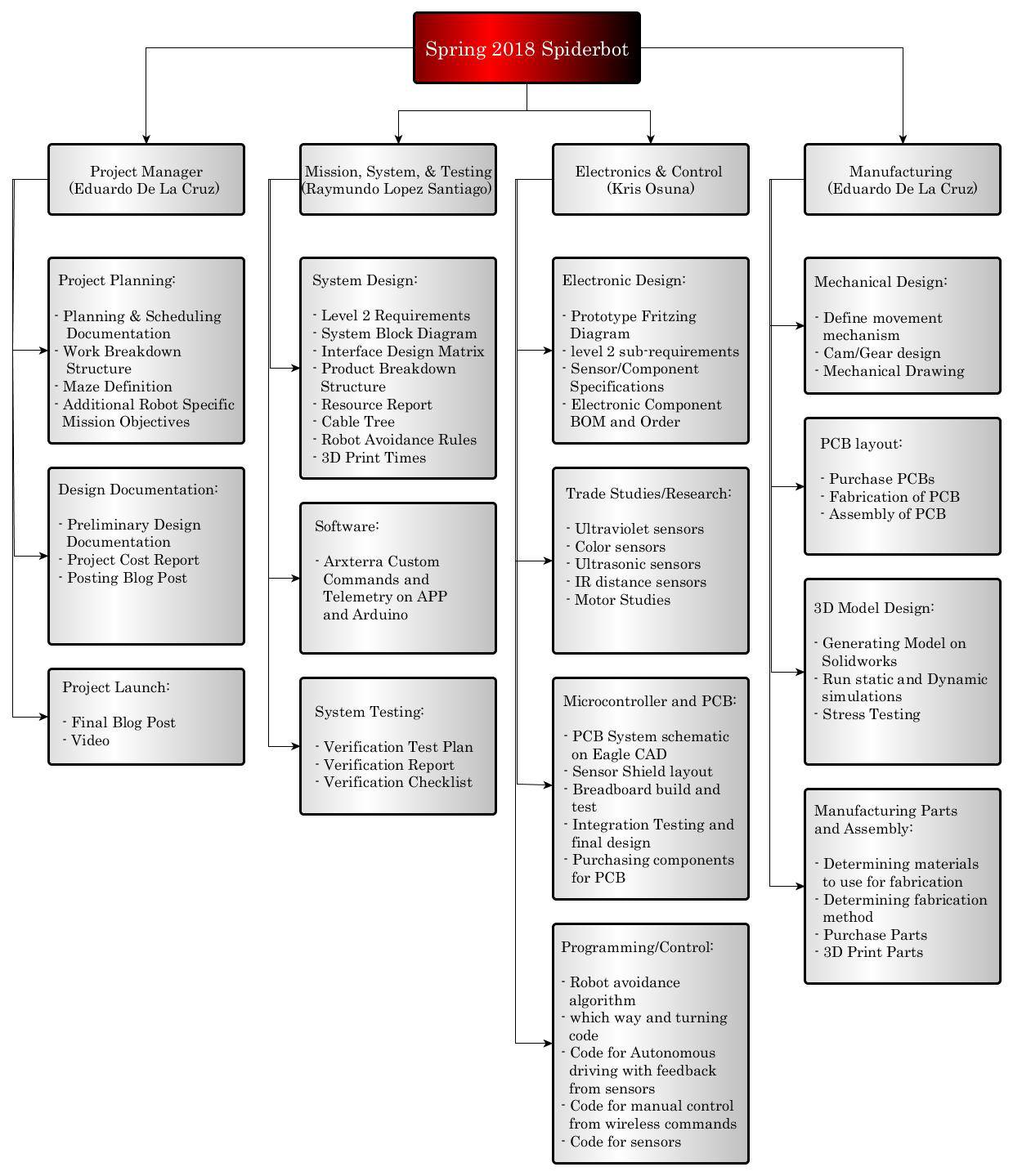
Below is the Work Breakdown Structure (WBS) for our project. The diagram is broken down into task each division engineer will be responsible for in the production of the final product. These assignments are based of the task matrix we developed as a class. Engineers can use this diagram as a reference for what they need to do. For a more detailed explanation of what each task consists of, consult the task matrix.
Figure 1: Work Breakdown Structure
Eduardo De La Cruz – Project Manager and Manufacturing Engineer
Due to having only three members per group, the Manufacturing Engineers of each group was assigned the task of project manager. Therefore Eduardo will be responsible for completing all the manufacturing and managerial task to ensure mission success.
The task shown above are broken down into top level task. All task that fall under each top level task will be the task each engineer will be accountable for. Top level task are organized in the order of priority. Therefore,
Top level task:
As Project Manager Eduardo will have to:
Prepare the project planning documentation
Prepare all design documentation
Project Launch Documentation
As Manufacturing Engineer Eduardo will have to:
Create the Mechanical Drawings.
PCB layout
Design the 3D Models.
Manufacture Parts and Assemble final model.
For specific details on what each task contains, see the work breakdown structure chart.
Kris Osuna – Electronics and Control Engineer
Kris Osuna will be responsible for designing, programming, and for doing all research for the hardware we will be using. His top level task are organized in order of priority:
Top level task:
Electronic Design
Trade Studies/Research
Microcontroller and PCB
Programming/Control
For specific details on what each task contains, see the work breakdown structure chart.
Raymundo Lopez Santiago – Mission, System, and Testing
Raymundo Lopez Santiago’s top level task will be to work on the system design, software, and hardware testing.
Top level task:
System Design
Software (for Arxterra interfacing)
System Testing
For specific details on what each task contains, see the work breakdown structure chart.
https://www.arxterra.com/wp-content/uploads/2018/05/rsz_wbs.jpg144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-05-06 19:05:472023-07-27 07:57:12Spring 2018 3DoT Hexy: Work Breakdown Structure
By: Kris Osuna (Electronics and Controls Engineer)
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
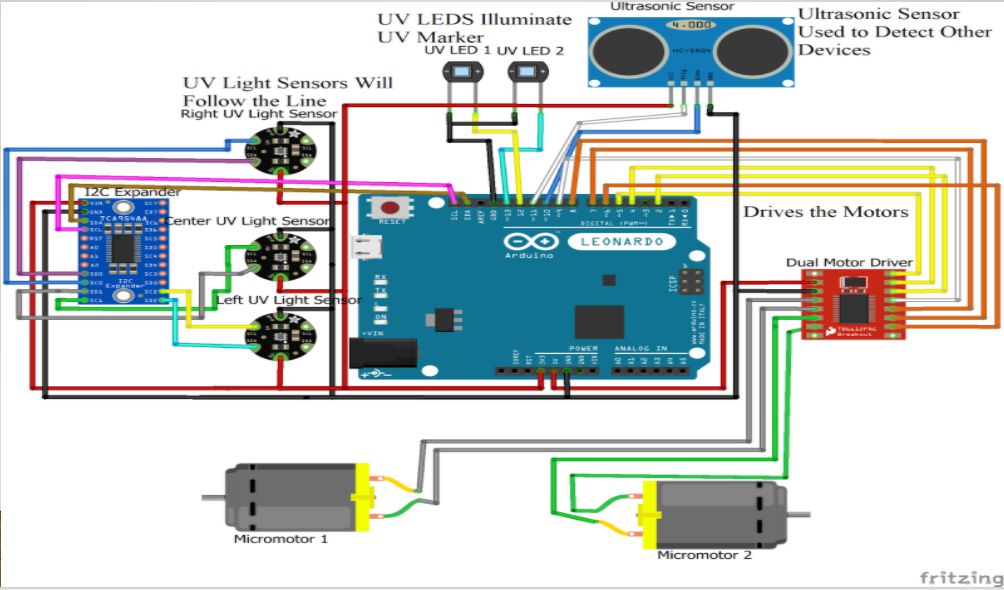
We used the open source fritzing software to create a prototype that will show all connections to an Arduino Leonardo. The Leonardo is used because it uses the same processor as the 3DoT board. The Leonardo provides 3.3V to the pins which is less than the 3DoT board provides, so if it works on the Leonardo it will work on the 3DoT board. The prototype will be able to move with motors connected to a dual motor driver to control the motors. Three UV sensors will be connected with three UV LEDs. The UV sensors and LEDs will help the robot navigate the maze. An I2C multiplier for the serial data is needed. An ultrasonic sensor is needed with two digital pins. The ultrasonic sensor will detect other obstacles.
Related Requirements
Level 1 Requirements
The robot will need to navigate remotely through a custom-built maze (built by AoSa image), memorize the path it took, start over, and autonomously travel through the path it took.
The robot shall avoid collisions if it encounters other robots while navigating through the maze. This involves detecting the robot, retracing steps back, and moving to a room that allows the other robot to have a safe passage.
The robot shall use a v6.43 3DoT board.
The robot shall demonstrate the capabilities of the 3DoT micro-controller for DIY hobbyists.
Level 2 Requirements
The robot shall use a single RCR123A 3.7 V, 650mA rechargeable Li-ion battery to power the 3DoT board, which will power the drivetrain and all attached peripherals.
The robot shall use 2 UV sensors connected to a custom PCB.
The robot shall use a HC-SR04 ultrasonic sensor to handle robot avoidance.
Ultrasonic sensor shall have a range of 0.5-meter radius to detect and respond accordingly to other robots.
https://www.arxterra.com/wp-content/uploads/2018/04/rsz_capture.png144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-05-01 23:15:092023-07-27 07:57:12Spring 2018 3DoT Hexy: Prototype Fritzing Diagram
By: Eduardo De La Cruz (Project Manager & Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
The purpose of this blog post is to demonstrate how all parts designed in Solidworks were put together along with other outsourced materials. We will be assembling two models of our robot: the prototype which is based of our preliminary design review design and our final design which can be found in “Spring 2018 3DoT Hexy: 3D Model”.
Related Requirements
C-03:
The robot will be designed to be a toy for people ages 8+.
C-04:
In order to minimize manufacturing cost, and packaging cost the robot shall be able to be constructed from sub assemblies within 10 minutes.
Assembly of Final Model – (May 07, 2018)
Parts
3D Printed Parts:
x1 – Sensor Enclosure
x1 – Hardware Enclosure
x1 – Top plate
x1 – Bottom plate
x1 – Cable tube
x2 – Left Femurs
x2 – Right Femurs
x2 – Middle Femurs
x6 – Tibias
x6 – Femur-to-gear
Components Outsourced:
x22 – 3 -.5 mm nylon lock nuts
x6 – 3 -.5 mm hex nuts
x10 – 3 -.5 mm x 16 mm flat head machine screws
x12 – 3 -.5 mm x 20mm Socket cap screws
x6 – 3 -.5 mm x 16mm Socket cap screws
x12 – 8 mm x 4 mm OD x 3 mm ID aluminum bushings
x10 – 3 mm ID brass plated bushings
x16 – 3mm x 6mm (ID/OD) (#4) washers
x10 – 3mm x 8mm (ID/OD) (#6) washers
x4 – 3 -.5 mm x 45 mm socket cap screws
x4 – 1’ x ¼ ‘’ OD nylon spacers
x2 – Actobotics micro gear motor enclosure
x6 – 30T Ajax Scientific plastic gears
x4 – 10T Ajax Scientific plastic gears
x2 – Driving gears
x2 – 530 RPM micro gear motors
x10 – VxB 3 x 6 x 2.5 mm bearings
Required tools:
Philip Screw Driver
3 mm hex nut driver
3 mm allen key
Steps
Note: The leg assembly, which is the tibia, femur and gear will be advertised as a single piece to reduce assembly and disassembly times. However, for the purpose of this blog post we will go through the leg assembly for reference purposes.
Leg Assembly
Step 1: Connect the tibia to the femur and fasten them using a 20 mm socket cap screw and a hex nut.
Step 2: Connect the femur-to-gear joint to the gear and fasten them together by running a 16 mm socket cap screw with a #4 washer through the bottom of the gear and fasten them together using a lock nut.
Step 3: Connect the other end of the femur to the gear-to-femur joint using a 20 mm socket cap screw and a lock nut.
Step 4: Adjust how tight each screw is to achieve the best movement
Final Assembly
Step 1: Run a 16 mm flat head machine screw through the bearing bore of the gear, add a brass bushing and a washer through the other end of the screw, and fasten this assembly to the chassis using a lock nut and #6 washers.
Step 2: Connect the legs to the chassis leg guides
Step 3: Connect the top plate to the bottom plate using 45 mm socket cap screws, 1 inch spacers, and lock nuts.
Step 4: Connect the sensor enclosure to the chassis by using the same 45mm socket cap screws to one end of the chassis.
Step 5: Attach the motor enclosure to the bottom plate.
Step 6: Attach the cable tube to the back using the custom mount fabricated and using a 3 mm screw.
Step 7: Place the hardware cover which should clip on by the use of magnets.
For instructions on installing the hardware, reference the system integration and testing post.
Final Assembly
Assembly of Hexy Mk-01 (Prototype) – (April 3, 2018)
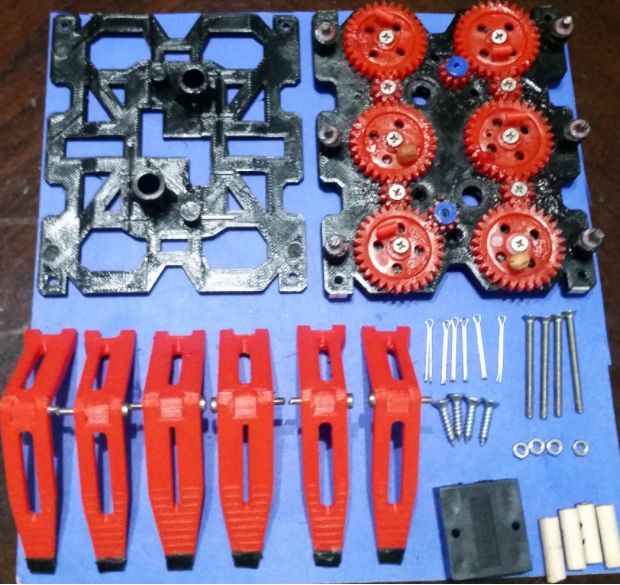
Figure 1: 3DoT Hexy Mk-01 Parts
Parts
3D Printed Parts:
x1 Bottom Plate
x1 Top Plate
x2 Left Femur
x2 Right Femur
x2 Middle Femur
x2 Middle Tibia
x4 Outer Tibia
x6 Femur-to-Gear joint
Components:
x6 cotter pins
x10 3-.5 mm nylon lock nuts
x4 3-.5 mm hex nuts
x6 2.5 x 15 mm machine screws
x10 3×15 mm machine screws
x4 3×30 mm machine screws
x4 3.5 x 15 mm sheet metal screws
x6 30T Ajax Scientific plastic gears
x4 10T Ajax Scientific plastic gears
x2 10T Driving gears
x2 530 RPM micro gear motors
x2 Actobotics micro gear motor enclosure
x6 5×2 mm sheet metal screws
x4 20 mm x 3.5 mm (length/inner diameter) spacers
x6 3 mm x 10 mm (inner/outer diameter) washers
x4 3 mm x 6 mm (inner/outer diameter washers)
Required tools:
Philip Screw Driver
3 mm hex nut driver
Flat tip pliers
Recommended:
Figure 2: Lucas Red “N” Tacky
Adding Lucas Red “N” Tacky grease before inserting gear shaft screws and to the gears themselves improves the performance of the cam system by reducing friction between parts.
Steps
Connect femur-to-gear joint to gears. Insert 5×2 mm sheet metal screws into designated gear hole. Connect joint to gear by screwing it in until the joints bottom face comes in contact with the gear.Figure 3: Assembling gear-to-femur joint
Place Washers and gears over gear holder holes. Note 3 x 10 mm washer go on 30T gears and 3 x 6 mm washers go on 10T gears. Figure 4: Placing washers
Insert 3×15 mm machine screws and place nylon lock nuts on the underside. Screw in nylon lock nuts, using 3 mm hex nut driver, to a desirable position that is not to tight to prevent gear rotation. Note: Adding grease to screw shaft and gear improves cam performance. Figure 5: Placing gears, screws, and lock nuts
Assemble legs. Mate the femur to the tibia to form elbow joint. Insert 2.5×15 mm machine screws to hold joint together. Figure 6: Assembling legs
Adding legs to cam system. Connect legs to femur-to-gear joint using cotter pins. After inserting cotter pins use flat head pliers to pry open the endpoints of the cotter pins. Figure 7: Adding cotter pins
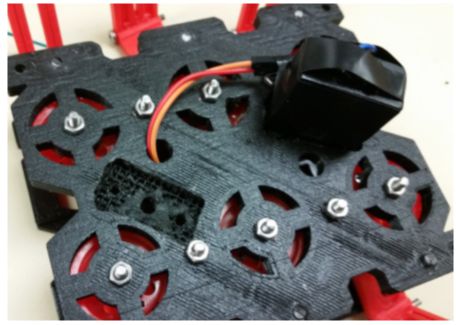
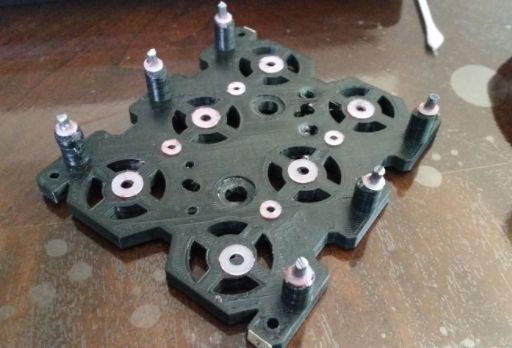
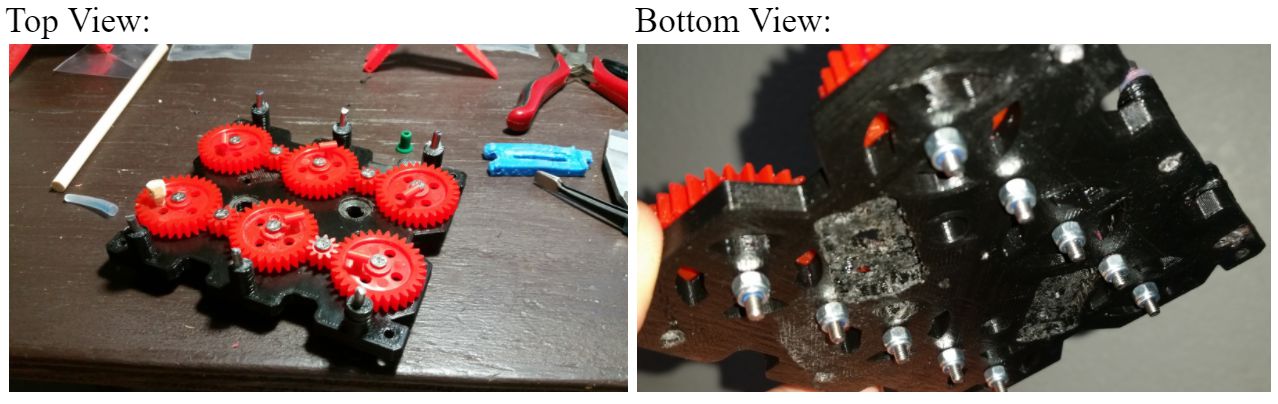
Insert micro gear motor enclosures to the underside of the bottom plate and screw them in place using 3.5 x 15 mm sheet metal screws. Figure 8: Adding micro gear motors
Insert 10T Driving gears from the top plate and insert micro motors from the bottom plate. Since we are using the method A driving gear design (read above) we will need to apply a little pressure to insert gear with bushing into the shaft of the motor. Figure 9: Adding driving gears
Insert femur’s center opening on the aluminum rods (as shown above)
Place top cover, align it with the bottom plate, insert 20 mm spacers in each corner, insert 30 mm machine screws in each corner, and screw hex nuts to screws from the underside of the bottom plate. Figure 10: Adding spacers, screws, and hex nuts
https://www.arxterra.com/wp-content/uploads/2018/04/rsz_1capture.png144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-05-01 23:08:042023-07-27 07:57:12Spring 2018 3DoT Hexy: Assembly (Prototype/Final)
Verified by: Eduardo De La Cruz (Project Manager & Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
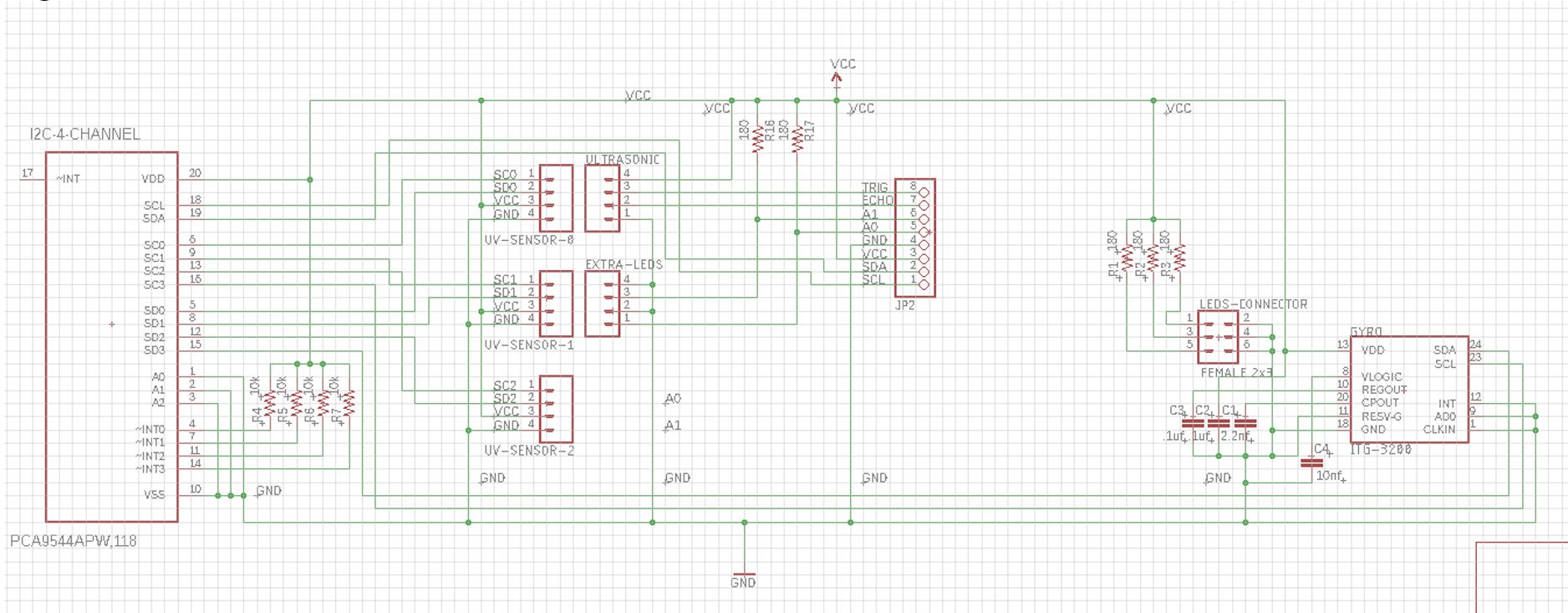
This blog contains the sensor shield schematic that the PCB will be based on. The schematic must contain these parts: I2C multiplex, connection to UV sensors, connection to LEDs connection to ground and power. The UV sensors, LEDs and booster are not going to be directly to the schematic. These items are going to be connected through wires so headers are going to be needed to connect them. We are getting digital pins from J3 which will be going to connect to the 3DoT. The powerI tried to make the schematic as clear as possible so the viewer can understand what is happening and which sensors are connected or related. Libraries for each product were easy to find online.
Related Requirements
Level 1 Requirements
The robot will need to navigate remotely through a custom-built maze (built by AoSa image), memorize the path it took, start over, and autonomously travel through the path it took.
The robot shall avoid collisions if it encounters other robots while navigating through the maze. This involves detecting the robot, retracing steps back, and moving to a room that allows the other robot to have a safe passage.
The robot shall use a v6.43 3DoT board.
The robot shall demonstrate the capabilities of the 3DoT micro-controller for DIY hobbyists.
Level 2 Requirements
The robot shall use a single RCR123A 3.7 V, 650mA rechargeable Li-ion battery to power the 3DoT board, which will power the drivetrain and all attached peripherals.
The robot shall use 3 UV sensors connected to a custom PCB.
The robot shall use a HC-SR04 ultrasonic sensor to handle robot avoidance.
Ultrasonic sensor shall have a range of 0.5-meter radius to detect and respond accordingly to other robots.
Update 3: Sensor Shield V3 ( April 10, 2018)
Parts
4-Channel I2C
Gyroscope
8-pin header
Five 4-pin headers
6-pin header
Schematic now contains these parts: 4-channel I2C, gyroscope, connection to UV sensors, an 8-pin header, five 4-pin headers and a 6-pin header. The 8-pin header will connect to the 3DoT board, which will provide power, ground and four digital pins. Three of the 4-pin headers will connect to the UV sensors. A 4-pin header will connect the ultrasonic. The last 4-pin header will connect two controllable LEDs. The 6-pin header will connect to 3 LEDs. I added resistors to the digital LEDs.
Figure 1: Sensor shield schematic version 3
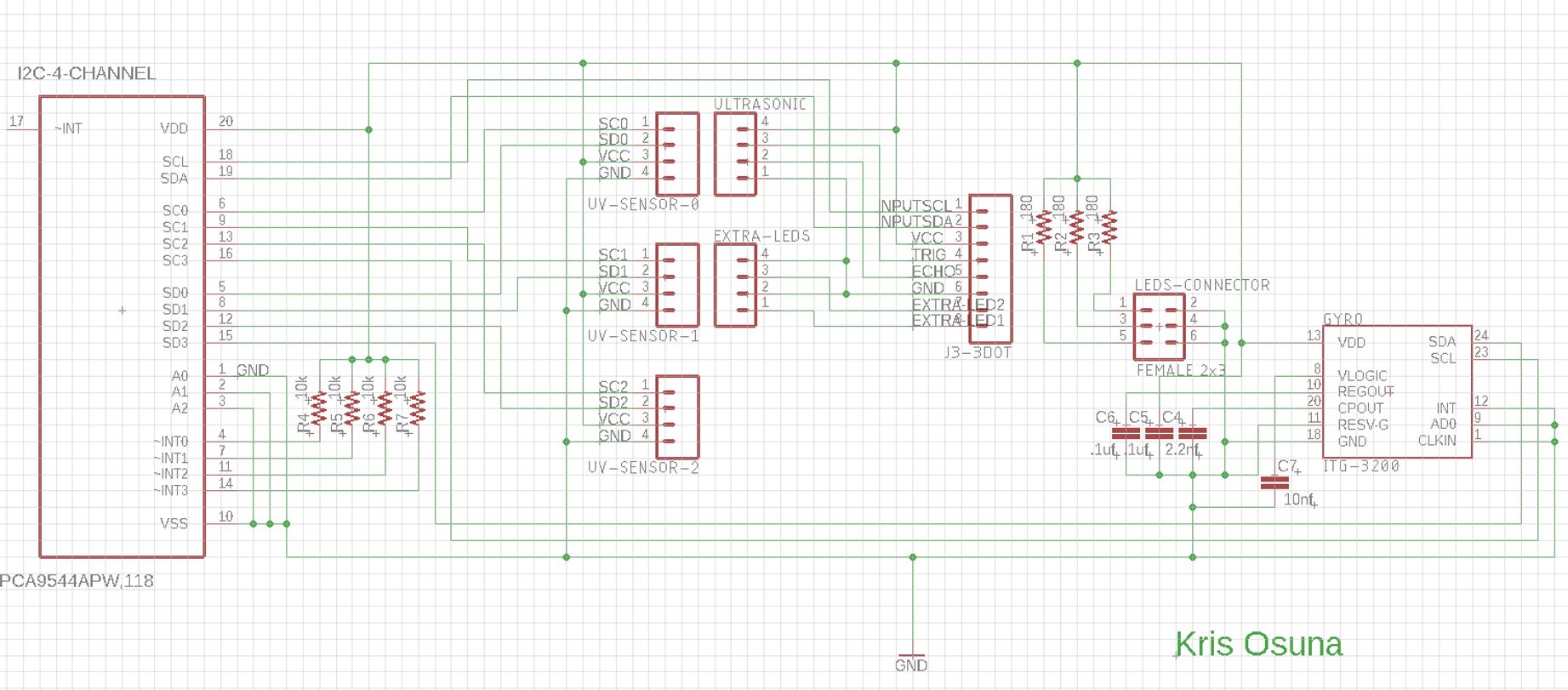
Update 2: Sensor Shield V2 ( April 03, 2018)
Parts
4-Channel I2C
Gyroscope
8-pin header
Five 4-pin headers
6-pin header
A gyroscope was added to the design. The gyroscope will help identify when the robot has made a turn. The 5V power was taken out and all power will now come from the 3DoT battery. The 16-Channel I2C is now a 4-Channel I2C to save space.
https://www.arxterra.com/wp-content/uploads/2018/04/rsz_21.png144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-04-29 19:21:022023-07-27 07:57:13Spring 2018 3DoT Hexy: Spiderbot Schematic
By: Eduardo De La Cruz (Project Manager & Manufacturing), Raymundo Lopez-Santiago(Mission, Systems, Test), Kris Osuna (Electronics & Controls)
Verified by: Eduardo De La Cruz (Project Manager & Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Mission Objective
Design and fabricate a remote controlled, competitively priced, toy robot that is capable of memorizing and traversing a path.
The child “teaches” his/her robot by guiding it through a maze. Once the child and robot team solve the maze. The child returns the robot to the entrance of the maze and quizzes the robot to see if it has learned the maze.
Additional robots may be introduced into the maze while the robot is moving through the maze. The robot should avoid collisions with the other robots.
Parents and friends may remotely view the progress of their child’s robot.
Our game testers will be given the robots on the day of the final. The test room is ECS 316. The maze will be located in the front of the room (about 8 ft x 18 ft).
Level 1 & Level 2 Requirements
By: Raymundo Lopez-Santiago
Requirements follow the following numbering conventions:
C-xx is used for all common requirements for all projects under The Robot Company.
L1:xx is used for all Level 1 requirements specific to 3DoT Hexy.
L2:xx is used for all Level 2 System and Subsystem requirements specific to 3DoT Hexy.
3DoT Hexy requirements will be updated as the project is further completed.
Level 1 Requirements
Program Requirements
C-01:
In accordance with the Spring 2018 final schedule, the project shall be completed by May 8th, 2018 and shall be prepared for a demonstration on the linoleum floor of ECS 316 on May 15th between the hours of 10:15 am – 12:15 pm.
C-02:
Documentation for the project shall be completed a week prior to the day of demonstration (May 8, 2018).
C-03:
The robot will be designed to be a toy for people ages 8+.
C-04:
In order to minimize manufacturing cost, and packaging cost the robot shall be able to be constructed from subassemblies within 10 minutes.
C-05:
The robot will be remotely controlled wirelessly via bluetooth using the ArxRobot Android or iPhone application.
C-06:
The robot will need to navigate remotely through a custom-built maze (built by AoSa image), memorize the path it took, start over, and autonomously travel through the path it took.
C-07:
Video support during autonomous navigation will be provided via the Arxterra control panel, as well as a live VR feed.
C-08:
The robot shall avoid collisions if it encounters other robots while navigating through the maze. This involves detecting the robot, retracing steps back, and moving to a room that allows the other robot to have a safe passage.
C-09:
For quick production of the prototype, the preliminary project shall be restricted to six hours of total printing time with a 2 hours limit for each single print.
C-10:
The robot shall use a v6.16 3DoT board.
C-11:
The robot shall demonstrate the capabilities of the 3DoT micro-controller for DIY hobbyists.
C-12:
The robot shall be designed in such a way that there are no dangling or exposed wires and the final fabrication is pleasing to the customer.
C-13:
The robot shall incorporate 3D printed parts to demonstrate the feasibility of the 3DoT board for 3D printed robots.
Project Requirements
L1-1:
The robot shall use sensors to: detect robots disrupting their path, for intersection detection, and for either line following or hedge following.
L1-2:
The robot shall use the same maze to compete in a game of who gets out first. (Defined by both 400-D sections)
L1-3:
To keep cost down, and keep as a toy aspect, the robot shall use only 2 micro motors to drive the movement of the robot.
L1-4:
Spiderbot shall have an allocated budget of $250, however to compete with the existing robot toy market we shall try to minimize the cost of production as much as possible.
L1-5
Spiderbot shall have custom SMD I2C shield as platform to build from and will incorporate peripherals for sensors and motors.
L1-6:
Spiderbot’s dimension shall have a chassis large enough to house a 3×7 cm 3DoT board.
Level 2 Requirements
System Requirements
L2-1:
Communication to the robot will be through the HM-11 bluetooth module.
L2-2:
The robot shall use a single RCR123A 3.7 V, 650mA rechargeable Li-ion battery to power the 3DoT board, which will power the drivetrain and all attached peripherals.
L2-3:
The robot shall use 3 UV sensors connected to a custom PCB.
L2-4:
The robot shall use a HC-SR04 ultrasonic sensor to handle robot avoidance.
L2-5:
The robot shall use 3D printed chassis and legs. This follows from the project level requirement about using 3D printed parts.
L2-6:
The robot will use a cam system identical to that of 3DoT David to drive the movement of the legs while navigating through the maze.
L2-7:
The robot shall use 2 micro guard motors to drive the motion of the robot.
L2-8:
The robot shall use one RGB color sensors to handle intersection detection.
L2:9
The robot shall incorporate 6 legs in the design of the drivetrain to improve stability while moving, to support its own weight and to mimic the behavior of a spider.
L2-10
The Arxterra control panel shall display the current battery level, as well as all sensor data.
Sub-System Requirements
L2-4a:
Ultrasonic sensor shall have a range of 0.5-meter radius to detect and respond accordingly to other robots.
L2-5a:
The robot shall use PLA or ABS filament in the fabrication of the chassis and legs. This will minimize the mass of the robot, while at the same time being strong enough to hold its weight.
L2-6a:
Gears shall have a gear capture system to prevent them from popping (main issue encountered in 3DoT David design). This ensures the cam system will work without fear of popping gears.
L2-9a:
The robot shall operate in a tripod form, having three legs (2 outer in one side and middle leg in the other side) to provide stability while moving.
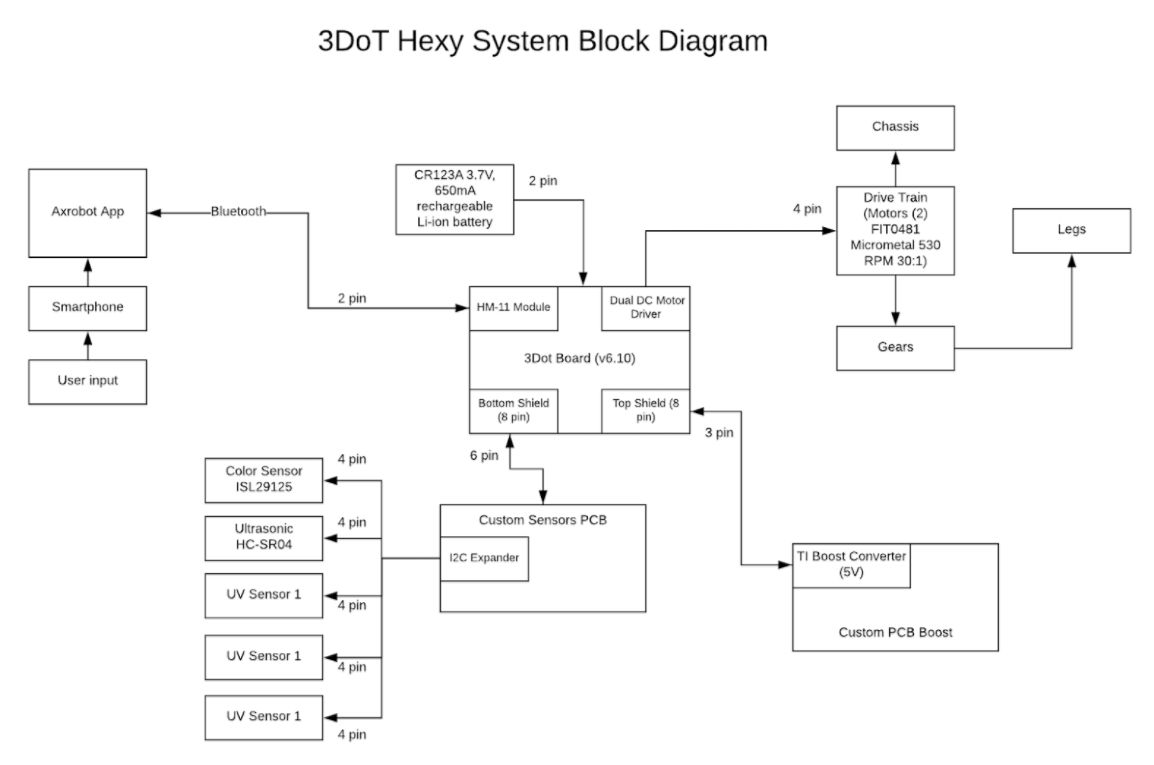
The system block diagram mimics the interface matrix developed for 3DoT Hexy. The 3DoT Hexy system block diagram below shows the different parts of the robot and how they interact with each other. A total of 9 pins out of the 16 pins available from the 3DoT board will be used for the custom PCB’s. The two custom PCB’s will be designed and built to add an I2C expander which will connect to all sensors, also a boost converter to provide 5V to the motor driver. 3DoT Hexy will be powered from a single 3.6V RCR123A battery. Communication for mobile operation of 3DoT Hexy will be done using the HM-11 bluetooth module. Any changes will be added as needed.
Figure 1: System Block Diagram
Work Breakdown Structure
By Eduardo De La Cruz
Figure 2: Work Break Down Structure, generated using yEd Graph Editor
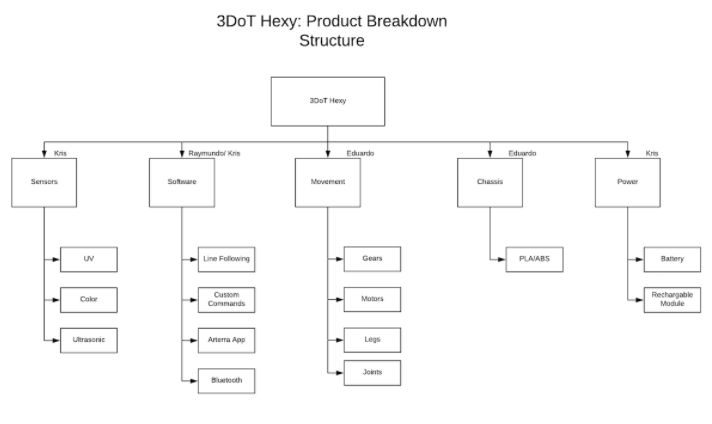
Product Breakdown Structure
By: Raymundo Lopez-Santiago
The product breakdown structure outlines the major systems of the robot. The 3DoT Hexy Product Breakdown Structure (PBS) below shows the different components (subsystems) of each part of the overall robot.3DoT Hexy is split into five sections (Movement, Software, Sensors, Chassis, Power) for the PBS. Anything related to the movement system which includes motors, joints, gears, and legs are the main parts for mobility of 3DoT Hexy. Communication via Bluetooth from a smartphone and the Arxterra app allow for wireless control of 3DoT Hexy. Sensors such as the color and UV sensors will aid in detecting corners and for the case of the ultrasonic sensor, it will aid in detecting robots. The chassis will be 3D printed in either PLA/ABS plastic. 3DoT Hexy and its peripherals will be powered by a single 3.6V RCR123A battery. Any changes will be added as needed.
Figure 3: Product Break Down Structure
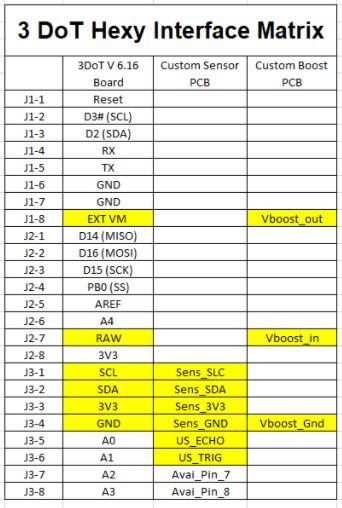
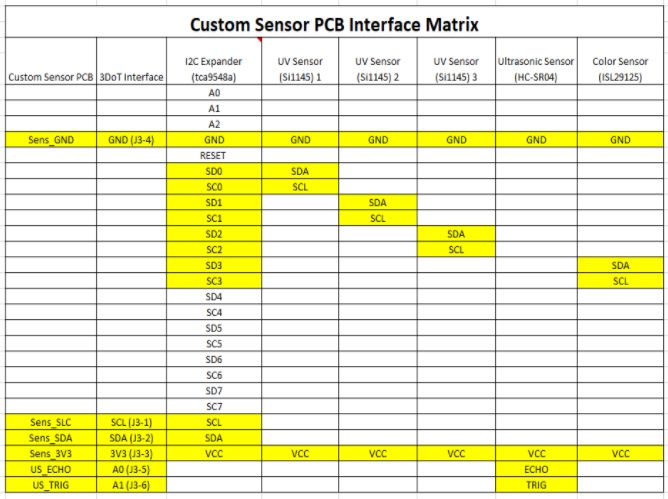
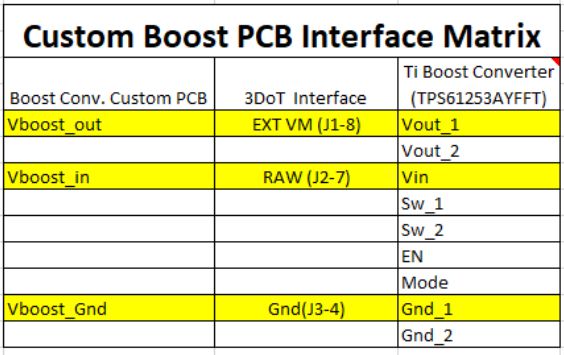
Interface Matrix
By: Raymundo Lopez-Santiago
Three separate interface matrices are created in a table format to show how the available pins for specific systems are going to be allocated in the design. This document helps show how things should be connected together using the corresponding pin names that are provided from the data sheets. For this project, we break up systems into 3 interface matrices which are the 3DoT interface, the Custom Sensor PCB and the Custom Boost PCB. The 3DoT interface matrix shows the pins allocated from the 3DoT board and how they connect to the two custom PCB’s. The Custom sensor PCB interface matrix shows connections used to connect the I2C expander (TCA9548A), Ultrasonic sensor (HC-SR04), and UV sensors (Si1145) to the 3DoT board interface. The Custom Boost PCB interface matrix shows connections used to connect the Boost converter ( TPS61253AYFFT) to the 3DoT board Interface. Since project Biped will be using similar PCB designs, we have decided to split the work and have our team work on the Custom Boost PCB design while the Biped team will work on the Custom Sensor PCB design.
Figure 4: Interface Matrix
Fritzing Diagram
By Kris Osuna
We will have three UV sensors. One sensor follows the line when another sensor is triggered 3DoT Hexy will know that the course has been disrupted and needs to readjust. We are using three UV sensors which requires three separate SDA/SCL pins, because of this we have an I2C expander. We will have two UV LEDs illuminating the front of 3DoT Hexy so the UV marker is detected. We use the ultrasonic sensor to find if other devices are in the way and if 3DoT Hexy needs to react. A dual motor drive is needed to drive both sides of 3DoT Hexy.
Having had decided to go with a cam system design similar to that of Spring 2016’s 3DoT David, we decided to get in contact with the owner of 3DoT David, and ask for permission to borrow the model for use as a reference, we went on to solve design flaws in 3DoT David’s mechanical design, came up with solutions, and rendered our own design fixing these bugs. Below are mechanical sketches of our design followed by brief explanations of why things look the way they are. If interested in more detailed explanation for design changes made based on the 3DoT David model, please read the blog post “Spring 2018 3DoT Hexy: Improving 3DoT David Design”. If interested in more details about how the mechanism works please see “Spring 2018 3DoT Hexy: Decision on Movement Mechanism”, and “Spring 2018 3DoT Hexy: Determining Gear Design” .
3DoT Hexy Mk-1:
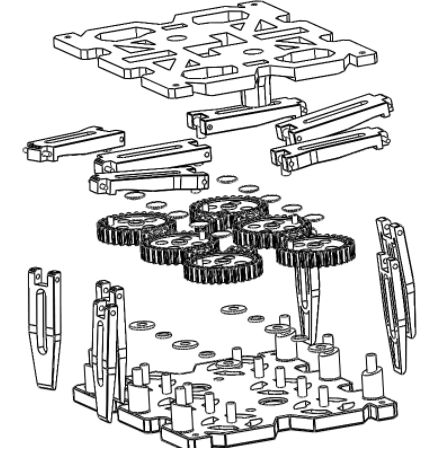
Figure 6: Exploded View of 3DoT Hexy Mk-01
An exploded view of our spider can be seen above. In all, we will have: 6 legs, 6 femurs, top and bottom plate, washers, x6 30T gears, x8 10T gears, and gear caps (to prevent popping).
Below are sketches of our design modeled using solidworks. All measurements are in mm.
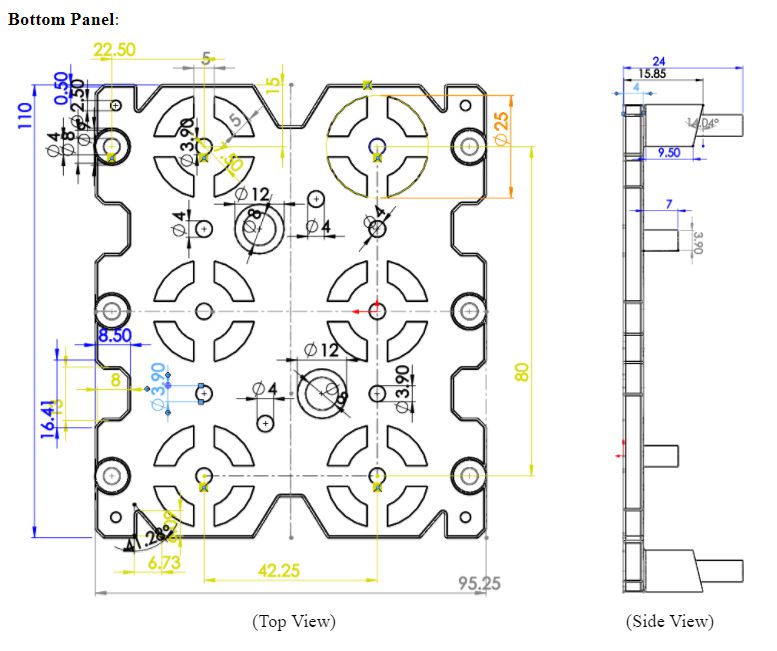
Bottom Panel:
Figure 7: Bottom Panel Dimensions
For the bottom panel, femur lifting guides will be integrated into the chassis instead of having them stick out like in 3DoT David’s design. This is done to reduce the overall width of the robot. Ten shafts with 4mm diameter will be located at 21.125mm from the center axis. We will extrude cut patterns to reduce 3D print times while at the same time giving our design a unique and appealing view to distinguish it from 3DoT David. The guides for the femurs will be angled. This is done in order to provide a smooth transition from ground to peak heights during the legs extension. For the holes found along the center axis: big holes will be used to run wires from top to bottom panel, and smaller holes will be used for driving motor connections. The design will have more holes upon determination of the position of the custom PCB board, battery, and 3DoT board.
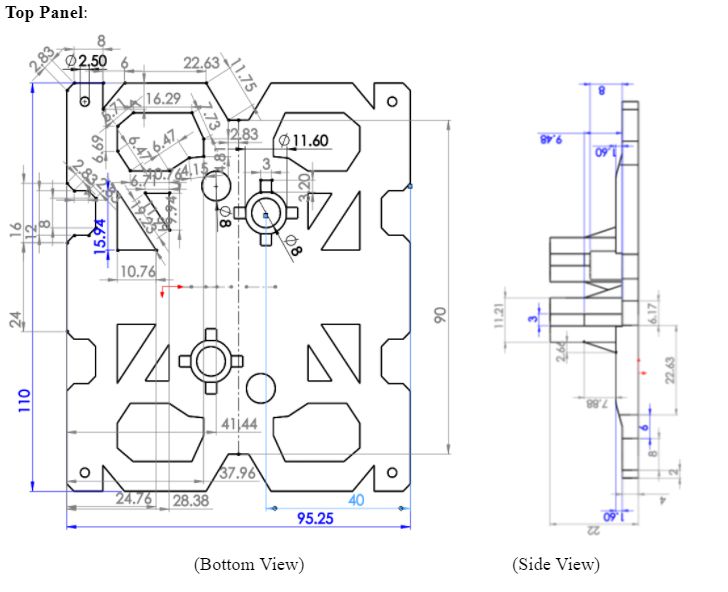
Top Plate:
Figure 8: Top Panel Dimensions
Top view will be flat and showing only the extrusions. The circles along the center axis will be: small holes, gear captures to keep the driving gears from popping and bigger hole will be a round tube extruding from top panel and that will connect to the bottom panel. Providing an isolated passage for wires from top panel to bottom panel without obstructing cam system. We will extrude cut patterns to reduce 3D print times while at the same time giving our design a unique and appealing view to distinguish it from 3DoT David. The design will have more holes upon determination of the position of the custom PCB board, battery, and 3DoT board.
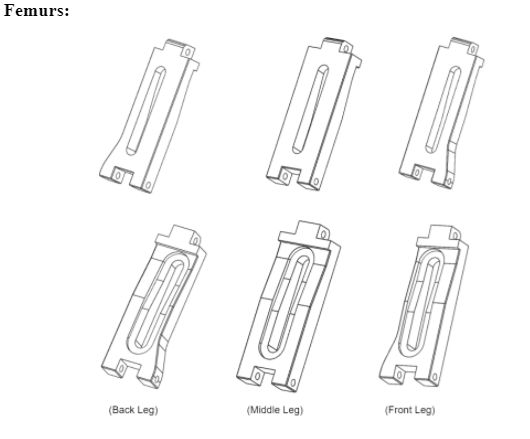
Femurs:
Femurs will be re-designed based on 3DoT David’s design review to incorporate more contact points for femur and tibia joint. Like 3DoT David, the back, middle, and front femurs will have a unique design. The reason for doing this is to provide clearance for when we put the screw mounts in each corner.
The three type of femurs:
Figure 9: Three Types of femurs
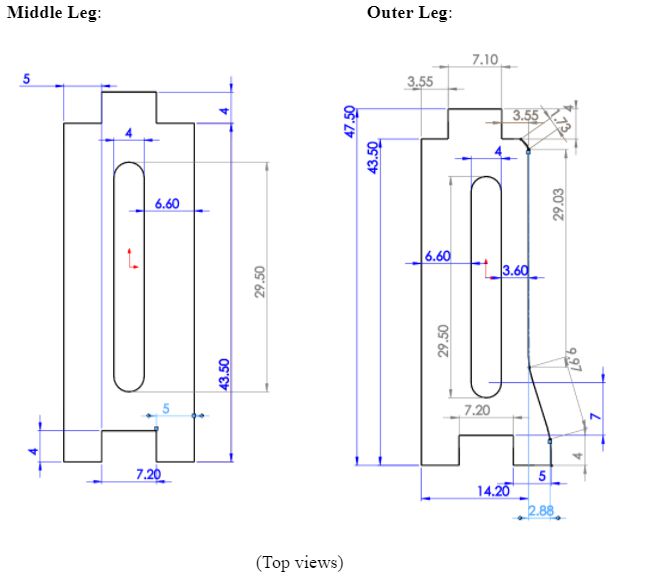
Figure 10: Middle femur dimensions
Note: The back leg will have the same measurements with extrude-cut on opposite side.
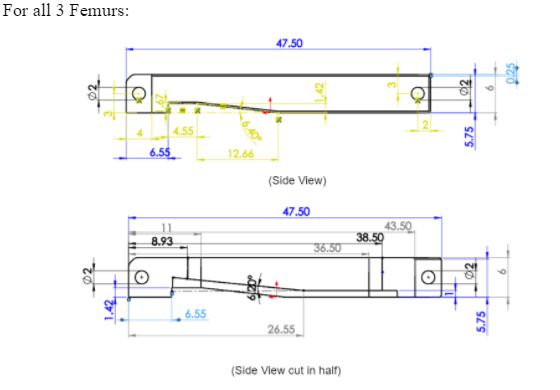
Figure 11: Femur Dimensions
We decided that integrating the lift mechanism into the femurs of the legs would give us more control over the lift angle (since it will be based on the angle of the contour we define), as well as reduces the width of the robot since we will eliminate the need of the protruding lift mechanism. As an added extra, we also expect to see reduced 3D print times for the femurs.
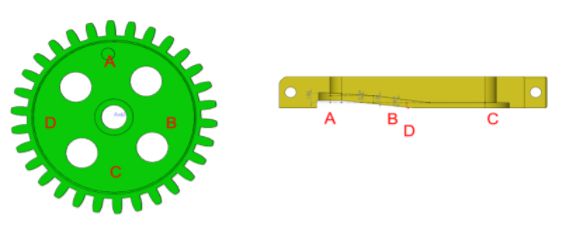
Our solution involves re-designing the femurs and the base to have a guide that will increment the angle of the femur as the femur rotates outward, providing lift. How it works:
Figure 12: Relation between femur and gear during gear rotation
At point A the femur should be touching the floor and preparing for thrust. At point B, the femur begins ascending. At point C the femur is at its peak lift. At point D, femur is descending.This solution enables us to control the lift of the legs based on the angles of the femurs; eliminating the need of the protruding mechanism from 3DoT David. The guide that the femurs will follow will also have an angle to provide a smooth transition from point A to point C. More details of how this works can be found in “Spring 2018 3DoT Hexy: Improving 3DoT David Design”.
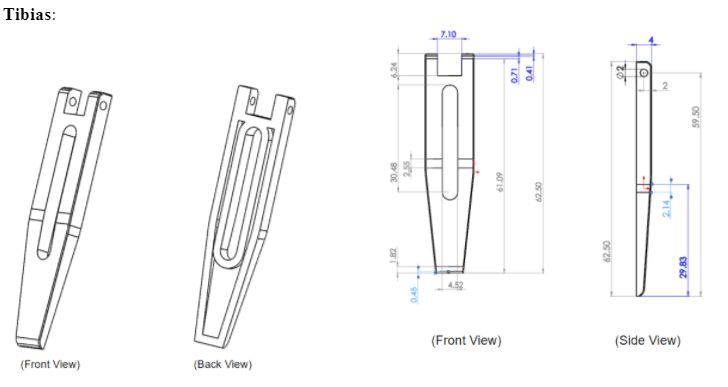
Tibias:
The tibias will have a new joint redesign in order to increase femur-to-tibia contacts for joint strength. Previous design only had a single contact point and was susceptible to loosening.
New design will have 5 contact points.
Figure 13: Tibia Dimensions
The legs will be wider than those of 3DoT David due to the increase width needed to increase contact point of femur-to-tibia joint. The result we can expect from this is increased 3D print times due to larger surface area of tibias. To try to fix this issue we trimmed the width of the tibias by 2mm (from 6mm to 4mm) and decided to shell/hollow out the tibias and cut out excess material by making the opening right down the middle. The legs have a 2mm holes that will align with the 2mm hole of the femur. Thread will be created through this joint and a screw will be placed through femur-to-tibia joint to prevent them from moving.
Additional Components we will use in our design will be:
This section provides all of the information for the three major resources that are being tracked which are Power, Mass, and Cost. Values obtained for 3DoT Hexy are estimates based on previous research. At this moment, not all measurements/testing for all sensors are finished. For the Battery and 3DoT values (mass, power) were estimated based on the final blog post of 3DoT David. For the 3DoT Hexy design, we are building of the design of 3DoT David and further making improvements. After testing several weight values on top on 3DoT David, we determined the total project allocation mass for 3DoT Hexy should be 500g to still be able to move. For the project power allocation, it was determined to be 1.1A from the 3.6V RCR123A battery. Values will be updated as project is progressed.
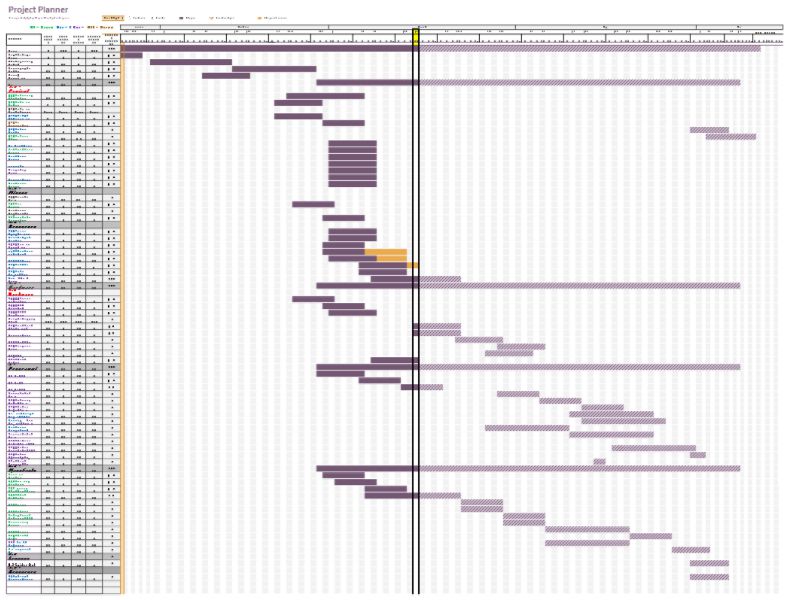
The schedule we will use will practically mirror the the time frames and due dates priorly established in the task matrix. The goal is to provide a visual reference of how far or close one is from reaching their deadlines for a given task.
Figure 15: Project Planner generated using EXCEL Project Planner
Dark purple represents our progress, light purple represents what needs to be done. If we exceed the due date the bar will turn orange. Orange lets us know how many days it was late after the due date due to time extension request. Task for each division are color coded and their is a legend at the top explaining each color.
Note: Division members may take on task from other divisions if they see that they have the time available in their existing schedules to aid other divisions in getting their task done.
A link to our task matrix and project schedule generated can be found below:
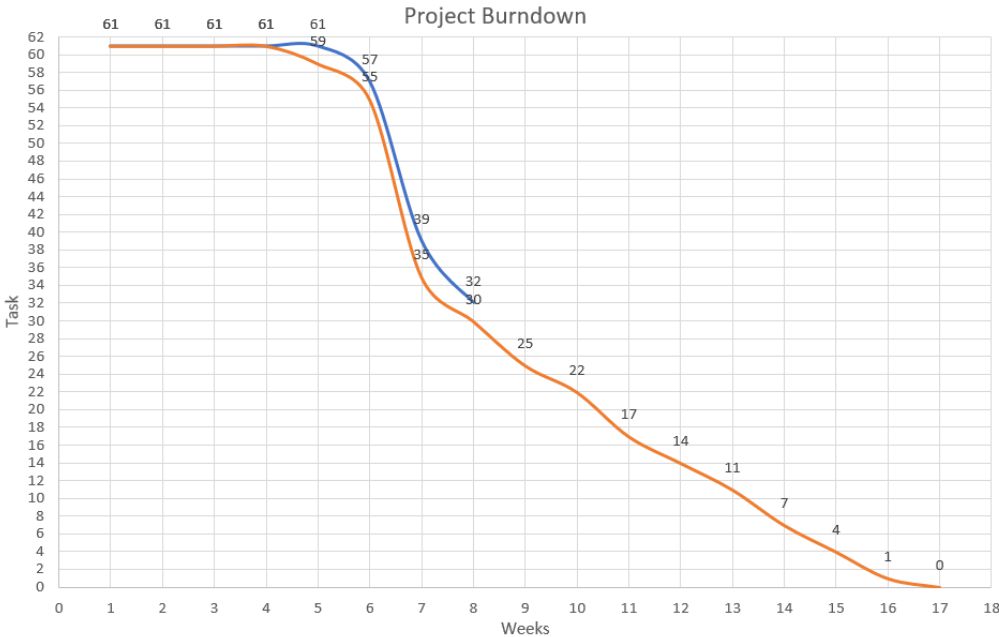
The graph shows how task will be distributed over the course of the semester. The goal is to finish all task before execution of the mission.
Figure 16: Project Burndown
Blue = Current Progress, Orange = Desired Progress
As off week 8, we have completed about half of the task defined in the task matrix. So far, we have submitted most if not all preliminary task documentations, and a few trade studies done by each division engineer showing their progress. For more details on what is due each week based on the above burndown read, “Spring 2018 3DoT Hexy: Project Planning and Scheduling”.
Summary of experiments done/Rapid Prototyping Completed
https://www.arxterra.com/wp-content/uploads/2018/03/image1.jpg144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-04-26 16:46:452023-07-27 07:57:13Spring 2018 3DoT Hexy: Preliminary Design Review
By: Kris Osuna (Electronics & Control Engineer) & Raymundo Lopez-Santiago (Mission, System, and Test)
Verified by: Eduardo De La Cruz (Project Manager & Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
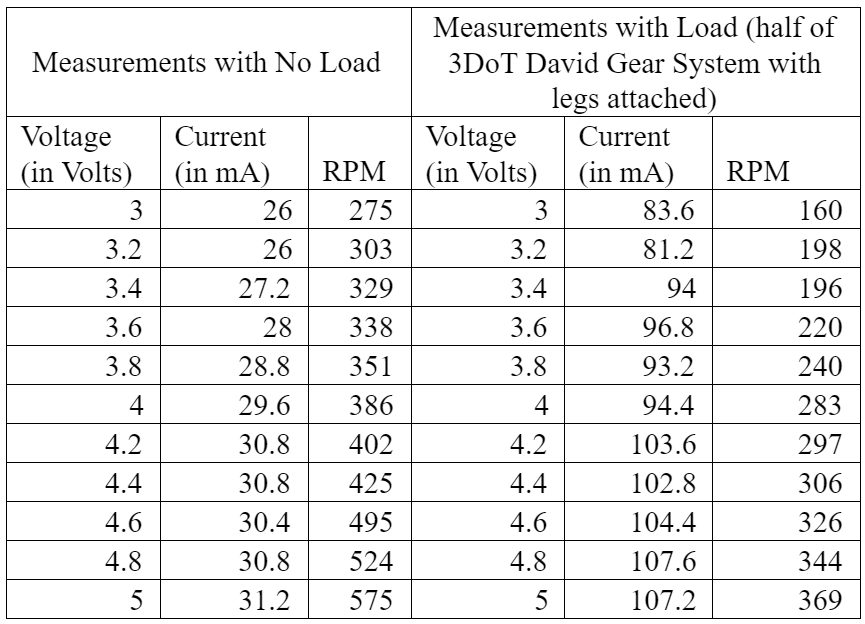
This blog post covers two test cases conducted with two different sets of motors. The first set of two unidentifiable model number DC motors were obtained from Professor Hill’s resource cabinets. The second set of motors include two DFRobot FIT0481 micro metal gear motors to be used for our 3DoT Hexy project. For both test cases, current and voltage measurements were obtained using an Arduino Uno and a INA3221 Breakout Board. The current measurements is our power test since we are planning to add up all currents to make sure we do not exceed the 650 mAh battery (1300 mA) allowed from the project. Tests also involved using the EE370L Parallax board to measure RPM of the motors at various voltages. Measurements were taken with a load that is half the weight of 3DoT David (66.3g) and the gears in motion. Apart from conducting test with both sets of motors, an additional test with 3DoT David’s motors (Micro Gearmotor – 900 RPM (6-12V))) was performed. Tests conducted include a no load and mock up under load test. Under the no-load test, the motor spun with no gears attached. Under the load conditions, the motor spun with gears in place and legs attached (half of 3DoT David’s gear system).
Components Needed
Scale
3DoT David
4 micro metal gear motors
INA3221 breakout board
Arduino Uno
Opto-Reflective switch
2 NPN transistors
Resistors: 100Ω, 200Ω, 1kΩ
Process Control Student Guide by Parallax INC
Information on motor tested from 3DoT David’s drive train system: Link
Information on motor purchased for 3Dot Hexy: Link
No datasheet is available for motors obtained from Professor Hill’s resource cabinets.
Related Requirements
The micro metal motor must be able to turn six gears
The motor must be able to work in the 3.6-5V range
The motor must have an RPM of at least 360 with a 66.3g load
Test
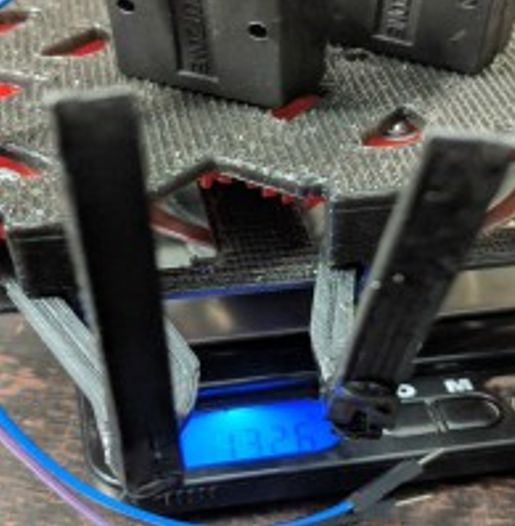
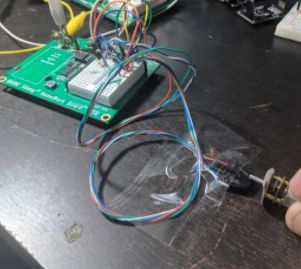
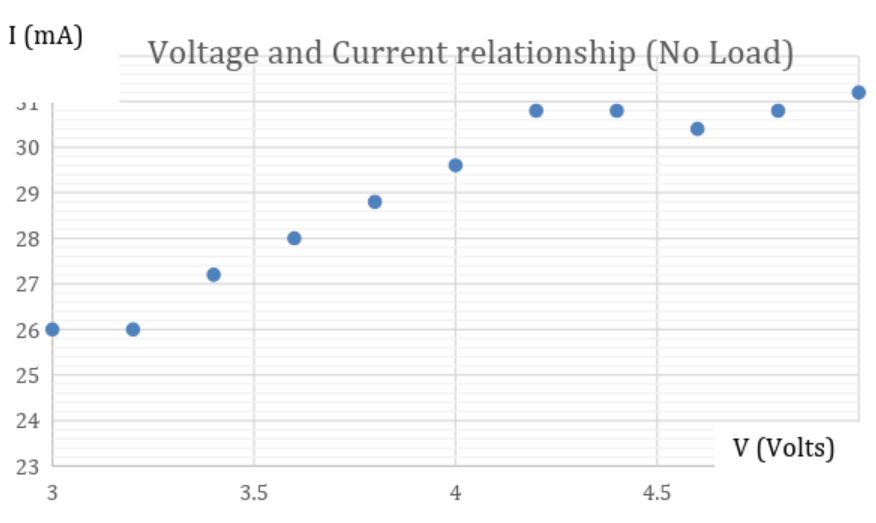
The tests involved using the EE370L Parallax board to measure RPM of the motors at various voltages. Activity 6 in the Lab manual (EE370L_Manual) was replicated but instead of a fan, the motor above was used. A half black/half white circle was used for the RPM test (See Fig.2).
A riser was placed on the scale and tared so that we can weigh 3DoT David shown in Fig. 1. 3DoT David weighs a total of 132.6 grams. There are two micro metal motors used so each motor will have a load of 66.3 g. The original motor from the 3DoT David project was removed. The motors were connected to the INA3221 breakout board to measure current with no load. Set up can be seen in Fig. 2. RPM was calculated by using the opto-reflective switch to read the black marked paper on the sheet attached to the motor as the motor spins. The opto-reflective switch has an IR LED and phototransistor which is able to differentiate the black and white part of the paper. Each count means a full rotation was achieved. The motor shaft was marked black and recorded for 10 seconds then played in slow motion to confirm that the opto-reflective switch readings were correct. This test was done to also both sets of motors.
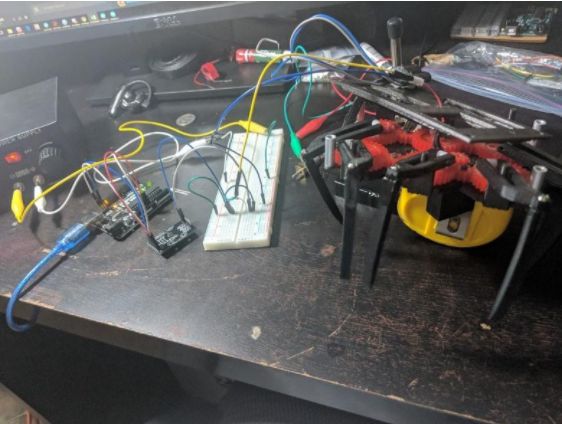
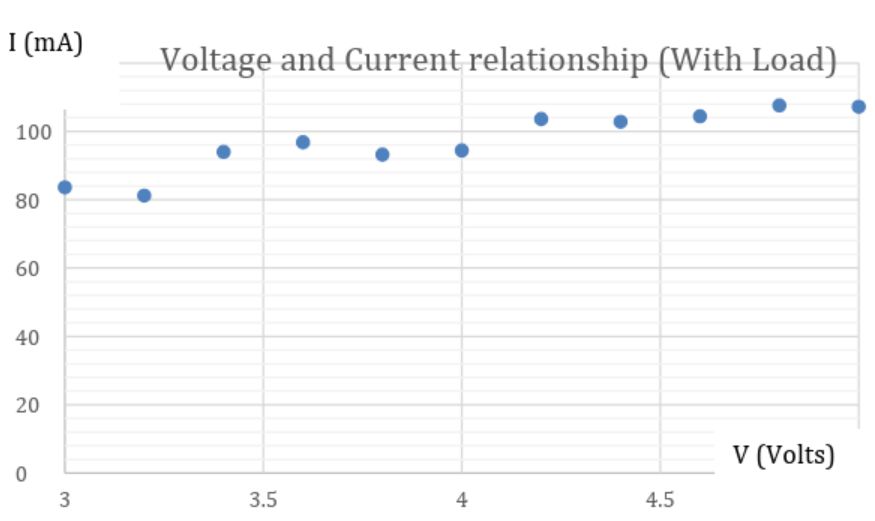
The two sets of motors being tested were replaced inside the 3DoT David gear system. This is done so that the gears moving would be part of the load (See Fig.4). The motors are connected to the INA3221 breakout board to measure the current while dealing with the load. RPM was calculated by using the opto-reflective switch to read the black on the sheet taped to the gear attached to the motor (See Fig. 3). The gear attached to the motor was marked, recorded for 10 seconds and watched in slow motion to confirm the opto-reflective results were accurate. Below are tables with results obtained with each motor at no load and with a load which includes half of 3DoT David’s gear system. Half of 3DoT David’s gear system consists of (3) 30:1 gear ratio gears and (2) 10:1 gear ratio gears. Graphical representation of all measurement results is shown in Fig. 5, 6, and 7.
Figure 1: Measuring 3DoT David’s Weight
Fig. 2: RPM test with no load
Fig. 3: RPM test with load
Fig. 4: Voltage and current measurements with load (half of 3DoT David’s gear system)
Results
Table 1: Measurements of cabinet motors at 3.7 V
Table 2: Measurement of cabinet motors at 5 V
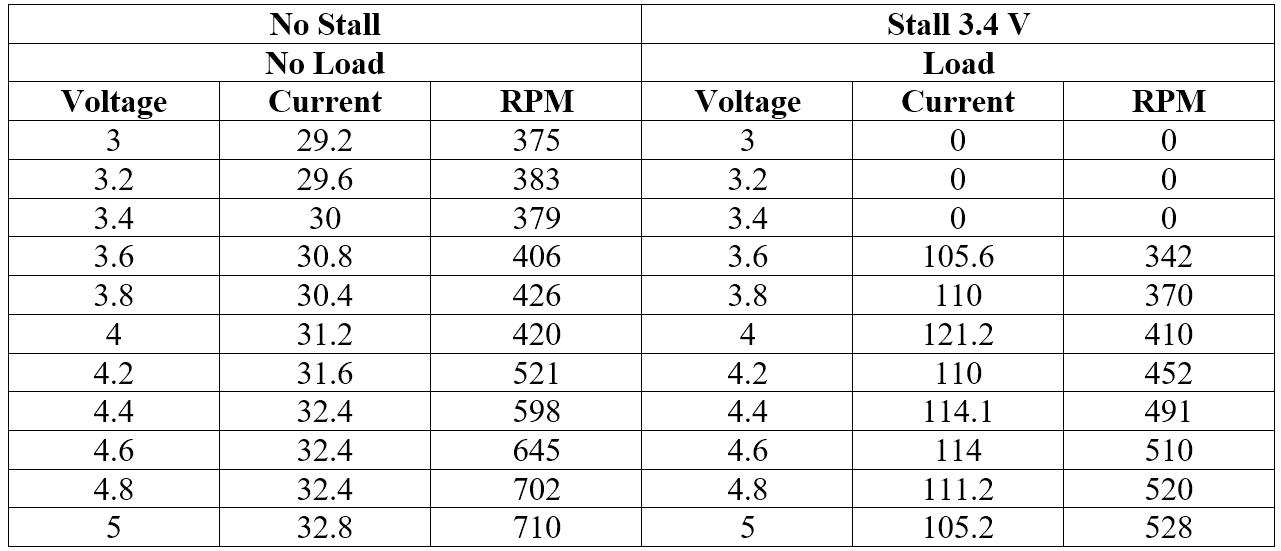
Table 3: Table showing measurements with load and no load from 3 to 5 volts for motors from 3DoT David. (No stall exists with no load. Stall exist with load at 2.3 V)
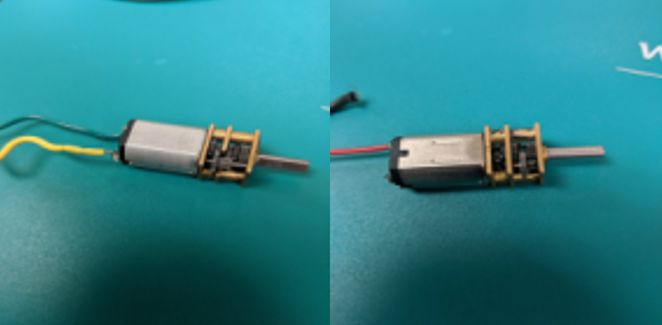
Table 4: Measurements of our purchased motors (FIT0481) (voltage in Volts, current in (mA))
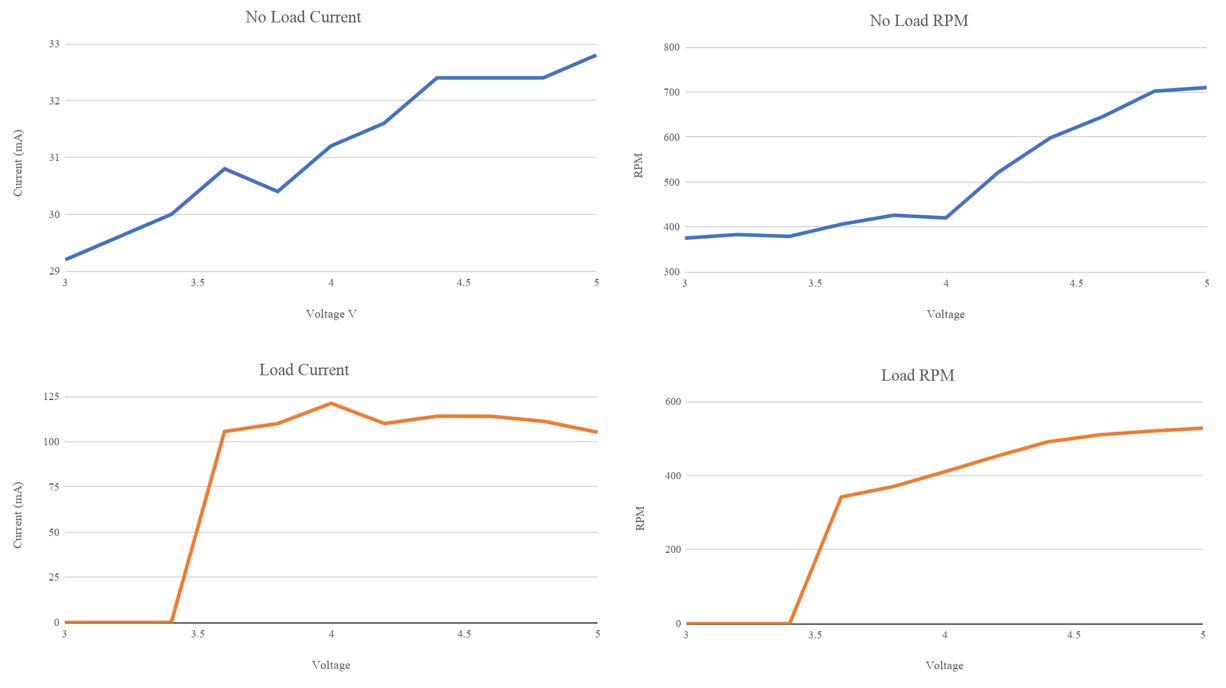
When a load is attached to a motor, it is expected to see a rise in the current draw since the motor works harder and furthermore increases torque and inversely has less rotational speed. This is what the measurement results show from Fig. 6. We can conclude that since the motor stalls at 2.3V with load, we need to drive the motor at a higher voltage. Based on the results at 5V with load, we get a significant motor speed with a reasonable current draw.
Fig. 5: Graphical representation of motor with no load at voltages between 3 to 5 volts for motors from 3DoT David.
Fig. 6: Graphical representation of motor with load at voltages between 3 to 5 volts for motors from 3DoT David.
The following graph is for table 4 which uses the purchased micro metal motors that will be used on 3DoT Hexy.
Fig 7.: Graphical representation from our purchased motors (FIT0481)
Conclusion
Factors for choosing the best-brushed motor for 3DoT Hexy included cost, size, voltage rating, and speed-torque relationship. Based on tests performed and since we are using a similar gear system from 3DoT David, it was concluded that a motor rated at 6V at no load speed of 530 RPM ( Link) will provide enough torque to drive the 3DoT Hexy’s gear system and legs. We will be using this motor at 5V and expect to have enough torque and rpm with the load. The purchased motors stall at around 3.4 V with a load, because of this it means that we can use can use the 3.7V to our motors provided by the 3DoT board. We are waiting for 3DoT Hexy to be 3D-printed to decide whether we will need 3.7V or 5V power to our motors. Once we find the full weight of 3DoT Hexy with all the sensors attached we should run another power study. The new power study will be more realistic because 3DoT Hexy will be moving and have all the sensors workings. If 3DoT Hexy can take the full load without the motors stalling at 3.7V we would only need one buck booster for the UV LEDs.
Resources
Figure 8: Micro Metal motors obtained from resource cabinets
https://www.arxterra.com/wp-content/uploads/2018/04/rsz_13.png144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-04-20 05:55:382023-07-27 07:57:13Spring 2018 3DoT Hexy: Mock-Up Motor Power Under Load and Power Estimate of Micro Metal Motors
By: Raymundo Lopez-Santiago (Mission System and Test)
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
This blog post covers 3DoT Hexy’s System Block Diagram. The 3DoT Hexy robot along with all its peripherals will be powered from a single 3.6V RCR123A battery. The 3DoT board will connect to all other devices. The 3DoT board comes equipped with a BLE Bluetooth module, Dual DC motor driver and (3) 8-pin connections to attach peripherals. Communication for mobile operation of 3DoT Hexy will be done using a BLE Bluetooth module which will be paired to the ArxRobot application. Two separate custom PCBs will be designed and sent for fabrication. The custom sensor PCB will have an I2C expander which will incorporate all sensors which include the color, ultrasonic, and light sensor. The custom Boost Converter PCB to provide 5V to the micro metal motors used to drive the gears/cam-system as well as three UV LEDs. Fig. 1 shows the system block diagram for 3DoT Hexy.
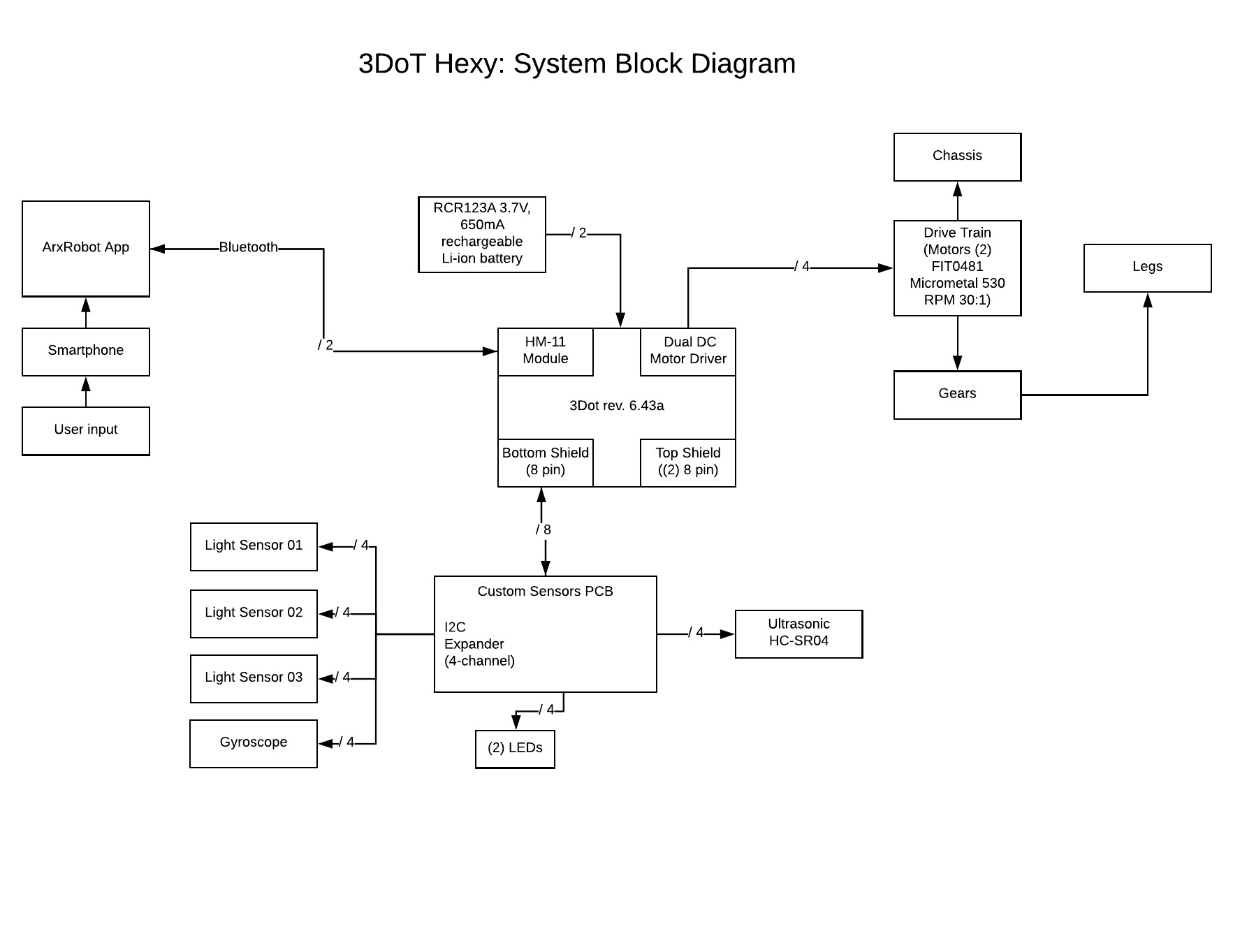
Update 04/17/18
Due to changes in the maze printing material and the fact that we are no longer using a boost converter, the UV LEDs will no longer be used and instead IR LEDs along with Light sensors will be used to handle intersection detection. Another change that is noticeable is instead of using an 8-channel I2C expander, we are now using a 4-channel I2C expander. The color sensor was removed from the design since we are using light sensors for intersection detection. A new addition to the design is the use of a gyroscope to aid in directional turning and two LEDs to act as eyes of the spider robot. The interface matrix was updated to reflect changes. Fig. 2 shows the updated system block diagram for 3DoT Hexy. Only 8-pins from the bottom shield of the 3DoT board will be used.
Fig. 1: 3DoT Hexy Updated System Block Diagram
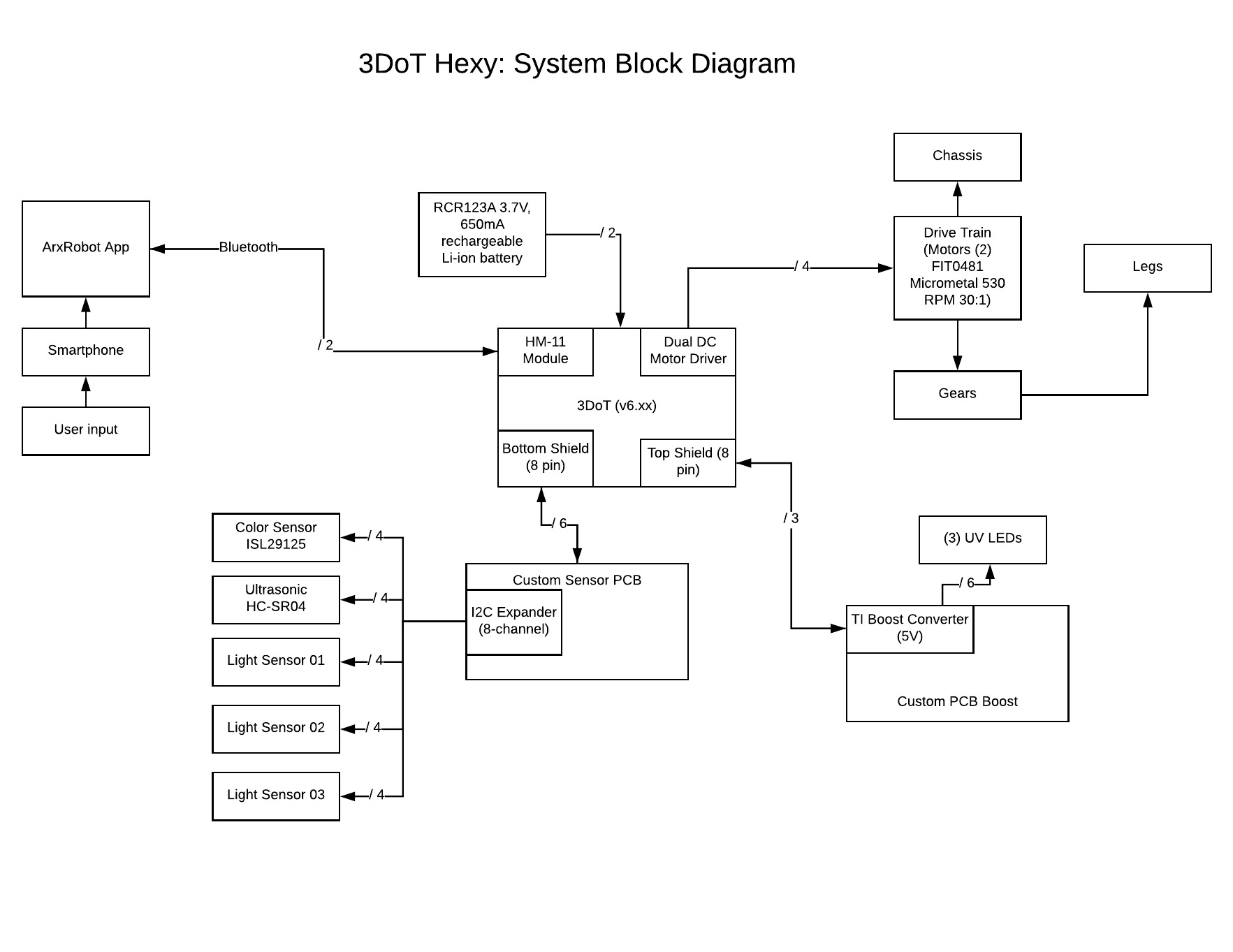
Preliminary System Block Diagram (03/15/18)
The system block diagram mimics the interface matrix developed for 3DoT Hexy. The 3DoT Hexy system block diagram below shows the different parts of the robot and how they interact with each other. A total of 9 pins out of the 16 pins available from the 3DoT board will be used for the custom PCB’s. The two custom PCB’s will be designed and built to add an I2C expander which will connect to all sensors, also a boost converter to provide 5V to the motor driver. 3DoT Hexy will be powered from a single 3.6V RCR123A battery. Communication for mobile operation of 3DoT Hexy will be done using the HM-11 bluetooth module. Any changes will be added as needed.
Fig. 2: 3DoT Hexy System Block Diagram
Conclusion
The system block diagram is designed taking in consideration of the 3DoT board as the main board to control any attached devices. Visually the system block diagram helps identify connections between devices and how many pins will be allocated or needed. The interface matrix and system block diagram were developed around the same time. I highly recommend to pair these two tasks very close to each other.
https://www.arxterra.com/wp-content/uploads/2018/04/rsz_rsz_updated_system_block_diagram_ee400d_-_page_1.jpg144144Eduardo De La Cruz/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngEduardo De La Cruz2018-04-19 07:17:302023-07-27 07:57:14Spring 2018 3DoT Hexy: System Block Diagram

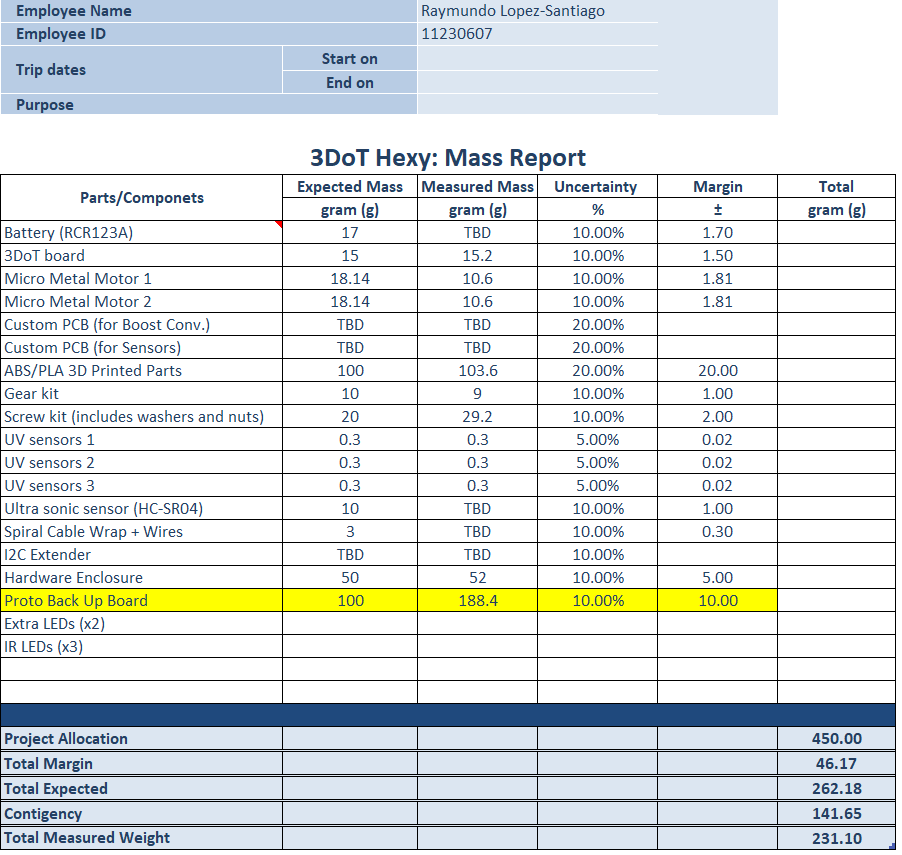 Fig. 1: Mass Report
Fig. 1: Mass Report