Executive Summary
Program Objective
By Carolina Barrera
The objective of the Prosthetic Arm is to engineer and design an arm that will help position the hand in three-dimensional space. The arm should allow the hand to reach the mouth as well as the dinner table (tray) to allow the user to pick up food items from the table and back.
Mission Profile
By Carolina Barrera
The arm in conjunction with the Hand group should allow a veteran amputee to complete an independent task as eating a Quarter Pounder meal by himself. The arm should be able to fit a long-sleeve tank/sweater that helps the discretion of the device.
Level 1 Requirements
By Luis Martinez
Final system requirements updated for the last demonstration include the custom PCB requirement per the criteria of Professor Hill, aesthetics, and noise. These specifications can be found at HERE in addition to the link ABOVE.
The Design
The system implements a MyoWare sensor that reads myoelectric signals from the bicep, and sends them to the MCU to control the up and down movement in the arm.
If you want to be directed to a specific topic in the system design documents use the links below. Click HERE to have access to the folder with all the 3D printed, and lasser-cut SolidWorks designs
System Design
System Block Diagram
by Luis Martinez
The system block diagram, depicting high-level block interactions between the electronic and controls subsystem responsible for supplying power, and managing sensory inputs, and the manufacturing subsystem, responsible for physical layout of the overall system structure, inclusive of the printed circuit board (PCB) can be found HERE.
Experimental Results
Trade-off Studies
Motor (the newest one 100:1 gearbox over 27:1)
by Fabian Suske
The blog post shows specifications the Electronics and Control Engineer accounted for when selecting the right motor for our project. The trade-off studies were done comparing a $500 motor and the one that we initially selected. However, this motor (Bipolar stepper with a 27:1 gearbox) was later replaced for a motor with the same specifications but a bigger gear ratio (100:1).
Trade-off studies for the motor can be found (HERE)
Battery
by Fabian Suske
The use of a battery was crucial for our design since portability and powertrain were two of our system requirements. The battery should supply enough power to both systems and meet a 20 minutes required duration.
Trade-off studies for the battery can be found (HERE)
Subsystem Design
Interface Definitions
by Luis Martinez
The updated interface definitions detailing interactions between the Teensy 3.2 microcontroller for the Prosthetic Arm, respective Myoware and temperature sensors, in addition to motor control and voltage regulating components can be found HERE.
Hardware Design
by Forrest Pino
The design of the arm implements a bicep and integrated forearm design. The two pieces are mainly 3D printed, but they have a couple of laser-cut acrylic pieces. The bicep structure is meant to be a strong and sturdy structure that holds and lifts the forearm, the hand and less than 1 pound of additional weight. The forearm design was meant to be a lighter and less compact structure, but yet strong so it doesn’t break with the weight of the hand, while held by the bicep.
Also, a vest was developed as a holding mechanism of the arm in case the weight of the arm gets on the way of the EMG sensor. However, this far we can test without the vest.
There is a blog post regarding the development and evolution of the hardware design of the bicep. For more information, click HERE
Advancement of the Design and Testing
Once the design was complete, a simulation was implemented in order to test the selected materials. The main pieces of the design were either printed with plastic filament or were cut from a sheet of acrylic that was purchased at a local hardware store. The printed pieces were made available by the division manager for manufacturing since he built and owned a 3D printer. The laser cut acrylic pieces were able to be accomplished because Professor Hill allowed access to a laser cutting machine. The designed pieces were constructed in a way that would allow them to fit together similar to puzzle pieces. These pieces would then be fastened together using nuts and bolts of various lengths and diameters depending on the available space surrounding the fastener holes. Since the utilized material is known, then a simulation can be constructed in order to simulate specific stresses and forces that a design may undergo. The simulation that was constructed for the bicep implemented stress under gravity and a 20 lb∙f at the axis where elbow rotation occurs. The 20 lb∙f was selected because the force exceeds what is required of our system and if capable, the design would be suitable for what is expected. In order to properly simulate the system, one must select various characteristics that would help mimic the system properly. Since fasteners were not constructed in the 3D modeling, bonded surfaces were implemented where the various parts touched each other. This allowed for the pieces to remain secured in position when undergoing external forces within the simulation. The top plate of the design was chosen to be the fixed surface in the simulation so that the simulation would more closely mimic the mounting of the arm in real life.
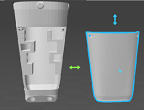
The image below highlights the areas in which the design experiences the most deformation due to the external forces that are applied. The blue areas experience the least change while the areas in red experience the most deformation. The image below seems to show that under the current forces, the design would not be able to sustain its structural integrity. Although, the deforming that occurs in the images are greatly exaggerated due to characteristics that were set for the test. In the images, one can see that the scale for the alterations is in microns. The actual deformations in the real life implementation would go unnoticed.
The image below illustrates the design from behind while highlighting the stress that is experienced inside. Internally, the area that experiences the most stress would be the bracket that supports the battery. Despite the fact that the battery support appears to be losing its shape, the changes that are experienced are less than a few microns.
Figure 5.2.1.1
The image below shows the design from the front. The force that was applied to the axis of rotation for the elbow was implemented to occur in a fashion that was normal to the interior face of the bored holes for the gear shaft. The slight curvature inward is due to the bored section that surrounds the holes meant for the gear shaft. These recessed sections were implemented so that mounting brackets for the gear shaft could be affixed slightly below the surfaces of the walls of the bicep.
Figure 5.2.1.2
The image below illustrates the design from behind while highlighting the stress that is experienced inside. Internally, the area that experiences the most stress would be the bracket that supports the battery. Despite the fact that the battery support appears to be losing its shape, the changes that are experienced are less than a few microns.
Figure 5.2.1.3
The image below shows the design from the front. The force that was applied to the axis of rotation for the elbow was implemented to occur in a fashion that was normal to the interior face of the bored holes for the gear shaft. The slight curvature inward is due to the bored section that surrounds the holes meant for the gear shaft. These recessed sections were implemented so that mounting brackets for the gear shaft could be affixed slightly below the surfaces of the walls of the bicep.
The Support System
Demoing the project became a challenge since the team was unable to come into contact with a volunteer that happened to have the amputation that would benefit the most from our design. Since an amputee would not be utilized, a plan was set so that the prosthetic arm could be displayed in a manner that would mimic its use by an amputee.
The image below illustrates the support system that would allow the prosthetic arm to be suspended in the air with minimal effort from the user. A camping/travel backpack was utilized for the support system and was modified to better fit the needs of the project. The actual pack of the backpack was removed since it did not serve any purpose to the project. The top bar of the backpack was removed and replaced with copper pipe. The copper pipe and couplers were donated by Chris Pino and the access to his tools allowed for the proper cuts and drills to be made. The side bars were shortened on the top and bottom so that the overall size could be reduced. Luckily, the copper pipe was about the same size as the pipe used in the pack which helped to make fitting easier. The soft metals that were utilized were easy for drills and allowed for set screws to be placed. The screws helped secure the modifications and kept the structural integrity intact.
Figure 5.2.2.1
The image below highlights the positioning of the prosthetic arm compared to the user. The backpack originally utilized a push-button mechanism that allowed the user to detach bar meant to help facilitate storage. The push-button mechanism was taken and implemented so that the pipes that facilitate position could be removed and vertical positioning could be selected based on the user. From the image below, one can see that drill holes were made and that a fastening pin from the backpack was used to aid in vertical positioning. An issue that was encountered was determining the lengths of the pipes that would hang over the shoulder. At this point, it was decided that further work would be done on the attachment of the arm before pipe lengths could be finalized.
Figure 5.2.2.2
The image below highlights the positioning of the prosthetic arm compared to the user. The backpack originally utilized a push-button mechanism that allowed the user to detach bar meant to help facilitate storage. The push-button mechanism was taken and implemented so that the pipes that facilitate position could be removed and vertical positioning could be selected based on the user. From the image below, one can see that drill holes were made and that a fastening pin from the backpack was used to aid in vertical positioning. An issue that was encountered was determining the lengths of the pipes that would hang over the shoulder. At this point, it was decided that further work would be done on the attachment of the arm before pipe lengths could be finalized.
Figure 5.2.2.3
Once the knee pad was in place, then proper pipe lengths could finalize. The image below shows the final outcome of the support system. The attachments that were used for securing the prosthetic arm to the support system were pneumatic tool couplings. The pneumatic tool pieces and their arrangement were beneficial to the design because their swivel actions helped to mimic the movements that occur in a shoulder and allowed for easy detachment.
Figure 5.2.2.4
The image below shows how a user would attach and demo the prosthetic arm. The pneumatic tool couplings would simulate shoulder movement while the kneepad attachment would help guide the prosthetic arm alongside the user’s arm.
Figure 5.2.2.5
Software Design
by Fabian Suske
Arduino Codding
A blog post regarding the Codding of the Prosthetic Arm is available in HERE
Verification and Validation
Updated Requirements: Program Requirements
by Luis Martinez
In consultation with the customer, various iterations of the program/ project (L1) and system/ subsystem (L2) requirements were enacted throughout the duration of the project in effort to avoid redundancies and reallocate resources towards specifications for mission success.
Program requirements addressing schedule, cost, and storage were satisfactorily met and can be found here.
System Requirements
by Luis Martinez
Final system requirements updated for the last demonstration include the custom PCB requirement per the criteria of Professor Hill, aesthetics, and noise. These specifications can be found at HERE in addition to the link ABOVE.
Subsystem Requirements
by Luis Martinez
Final subsystem requirements updated for the last demonstration include the specification for a 55 degrees Celsius activation setpoint for a temperature sensor safety feature, and the size specification to be a focus on a 35 cm +/- 5 cm length allocation from the elbow to the tip of the middle finger on the Upper-Limb-Prosthetic System. These specifications can be found HERE.
Project Update
Work Breakdown Structure
by Carolina Barrera
The WBS is found HERE
Resource Reports
Mass Report
by Luis Martinez
Overall, power requirements were significantly lower than the petitioned allocation for 3.5A on 12V and 1A on 5V as evidenced HERE.
Power Report
by Luis Martinez
In terms of mass, the Upper-Limb Prosthetic System measured in at 1.321 kg (2.912 lbs) from the elbow to the tip of the fingers in actuality, with theoretical summation of weights shown HERE . Overall, the system weighed in at 1.99 kg (4.39 lbs), with individual component weights referenced in the same link as above. Both systems complied within their respective mass limits.
Cost Report
by Carolina Barrera
By the end of the semester we were 1.42% under budget. However, there are items that we just eat the cost for. Many of them because the person that purchase didn’t keep a hold of them or just forgot to keep them.
Click HERE to look at our finalized cost report
MyoWare muscle sensor is thee sensor we are utilizing to read the myoelectric signals from the upper arm of the amputee so we are able to flex and extend the arm (perform vertical motion).
Electrodes are implemented with the EMG sensor so the user is able to stick the sensor to the bicep and read the Myoelectric signals from it.
Bipolar Stepper is the motor located at the elbow joint that will allow a +60 and -90 degrees of motion in the vertical axis. This motor should have enough torque as lo lift the weight generated by thee forearm, the hand and the heaviest food item of a Quarter Pound with Cheese meal
For the project it is necessary to have a Vest to hold the arm. This vest will help with the simulation of the system since will be mounted to someone’s torso. It should hold the arm parallel to the torso and also leave some space for the ideal placement of the sensor in the bicep.
The Battery is a Zippy Compact 35C Series 1600 with a Voltage of 18.5 V. The battery is crucial for the operation of the Upper-Limb Prosthetic System since it will be powering the motor in the arm, the EMC sensor and the Hand ‘s MCU, and components.
We bought a 3D Printing Filament (PLA) reel before we knew filament was going to be provided by the class’ instructor. This was not included to the estimated price nor to the actual price (30 is multiplying 0). We just added to keep accountancy in our group. In other words, we are not expecting to be reimbursed for this item.
The PCB is our finalized circuit layout in a board. We are in our first iteration of the board, but we prepared in case we needed to order a modified (fixed) board.
The IC small electronics are all the small components (capacitor, resistors, inductors, ICs and kill-switch) implemented in the manufacturing of the PCB
Miscellaneous Mechanical includes all the structural aesthetic components for the arm or the vest. This amount is allocated to vacuum form components that benefited the aesthetics, and mount of the project
Project Schedule
By Carolina Barrera
The last update reported in schedule was CDR. In this report, it was shown that the “actual” line was starting to deviate from the “ideal” line. Meaning that we were getting behind in schedule with activities we were supposed to be doing, and we didn’t. Getting the PCB components, redesigning the forearm for integration and integration itself brought a few setbacks in our original design.
The next section shows our burn down diagram, and a brief description of pinpoint deadlines.
The burn-down shows is a good way to see the progress of the project, and the overall tasks during the semester. Time – counted in weeks, is along the horizontal axis, and the tasks are numbered, and added to be counted as completed on the vertical axis. The grey line is the “ideal” graph, which shows a uniform and constant completion of tasks during the given time. The yellow line shows the “actual” graph; the rate and actual items completed by the team in the time reflected. The numbers along these two lines are milestones along the progress of the project. For example, (1) corresponds to week 2, and is the week that the groups were assign. Little progress was done, but the group as a team was consolidated. (2) represents the research presentation on week 3. Studies were made to evaluate the best approach to complete the project. This involved planning, and minor advances in design; rough ideas. (3) is the Preliminary Design Review (PDR). (4) is Critical Design Review (CDR). (5) is the date the Arm and the Hand group scheduled as physical integration. However, no physical integration was accomplished by then. This is why the yellow lines grows slightly further from the grey line in this point. It should be made clear that even though integration didn’t happen, the two groups had independent advancements. We had our vest built, and our first PCB was almost finished.
Among the items pending after the final demo, and verification and validation were testing the integrated system, and generation of intangibles. Also, because of reasons beyond us, our MCU burnt on the day of the last demo, which didn’t give us an opportunity to demo our part on the entire system on the date of our final.
Concluding Statement
By Carolina Barrera
At the last phase of the development cycle of our project, we came up with aspects that could be improved in further iterations of the project. Challenges that include: the successful implementation of a kill switch as a safety feature of the arm, or trying to obtain the collaboration of an actual amputee for the project, or even trying to make a socket for the arm so it actually fits an amputee.
Future generations could take upon these challenges, and come up with improvement where we left off. The idea of documenting all these is that the generations to come use them as a baseline for their design. We might be able to shorten the path just a little, so they have a head-start in all this process.
As a team, we are very proud of what we accomplished. We learnt multiple aspects of the engineering method, experience the operational schema when working in an organizational matrix, and finally, we truly developed a more sophisticated use of our soft-skills. We hope our work helps you or inspire you. It is a beautiful process to see your ideas become tangible, and even more when they have the potential to help or impact a community.
Resources