
S17 Prosthetic Hand: Final Document
Final Documentation including Critical Design Review Information and files on all the final designs and codes.
Final Documentation including Critical Design Review Information and files on all the final designs and codes.
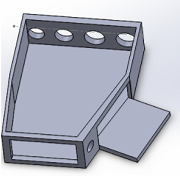
The process of designing the palm structure for the prosthetic hand and the adjoining thumb flexion components.

The process of developing the solidworks designs of the fingers for the prosthetic hand.

General Links to the Verification and Validation Reports for both the Prosthetic Arm and the Prosthetic Hand.
This is the working process of creating the firmware for the prosthetic hand, to control the motors and the servo in the hand with the flex sensors attached to the customer’s foot.
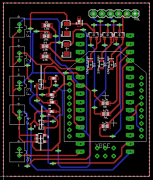
In order to control the Hand on this project, it needs two Printed Circuit Boards (PCB) to be wirelessly communicating to each other. One of the PCBs will be placed in the arm and the other in a containment box attached to the customers ankle that would have flex sensors attached on the inside of their shoe.

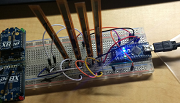
The Mode Selector Test is done to check if we can enter different modes using the Flex Sensors that were tested in an earlier blog post to control the movements of the Prosthetic Hand by syncing different types of movements of the hand to different modes that are achieved by syncing the modes to different movements of the flex sensors.

We completed this test to verify the hook up of the Xbee so we can design a shield for it, as well as getting the Xbee to be able to send and receive data from a wireless source. Ex hand to foot and vice versa.
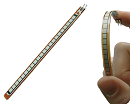
The Prosthetic Hand needs feedback in order to control the force of the grasp, therefore we are testing the force sensors to see if they can detect the force difference of the most minuscule item we have to grasp.