
Spring 2018 Maze Definition
By: Eduardo De La Cruz (SpiderBot PM), Ernie Trujillo (Goliath PM), Miguel Gonzalez (Biped PM), and Intiser Kabir (AT-ST PM)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
By: Intiser Kabir (Project Manager of AT-ST Walker)
We, the Project Managers for this Semester, are creating the initial design of how the maze will be structured so we can finalize the design of how our robots will be. The maze creates a limitation on how big our robots can be, how they can turn, ways to indicate an intersection, and types of sensors we can use. The maze we are redesigning must have the following: 3-way intersections, dead ends, and more than 1 path to finish including the shortest path. The shortest path must incorporate a right-hand rule for the robot as a fell safe, in case the robot doesn’t know how to detect intersections. We discuss how big the room size is for the maze along with either increasing or decreasing the size of the original design of the maze. We decide what type of material the maze should be, as well as a replacement for the current black lines. We also had to think what should be a backup method of navigating through the maze like a hedge follower. With all this information, we can finalize our robots’ design as well the methods of navigation through this maze.
Update 2: New Design (April 9, 2018)
Color sensors will no longer be implemented for our projects due to a customer revision of the maze definition. According to the customer, since we plan on using UV sensors for our line following design, it would be more optimal to implement intersection detection using a UV grid. Also color sensing was out of the question for robots like biped or velociraptor whom would have difficulty reading RGB due to required placement position.
New Design
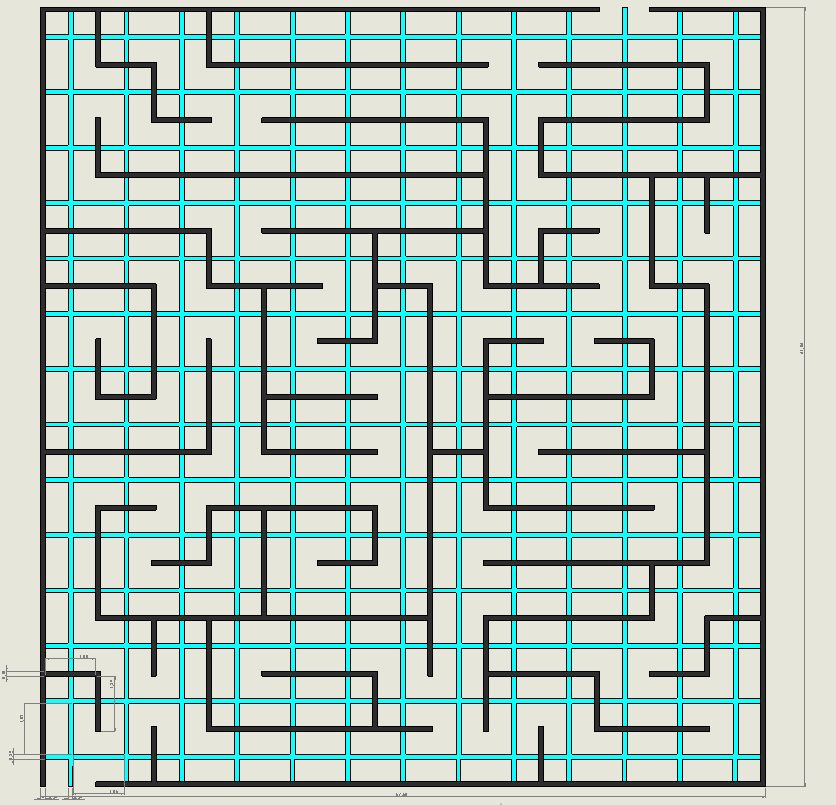
Figure 1: New Maze Design
As can be seen above, the maze design is a derivative of the maze design created by the Fall 2017 teams. All dimensions to the maze itself have not changed, we just added 4’’ x 4’’ cross hatched UV lines across the whole maze floor. The robot shall be able to detect if it is in a new room based on the intersection of two UV lines. UV lines will have a 1 cm or .393 inch line thickness which has been tested by Kris (Spiderbot E&C responsible for UV studies) for functionality.
Below is a file to the new Solidworks maze:
https://drive.google.com/drive/folders/1aZvnYXNC2wg36CWjMIFUWP1x0KuAyuNA
Printing of this maze can be done by converting the maze to a drawing.
Update 1 (March 15, 2018)
Things to take into account
By: Ernie Trujillo (Goliath PM)
When it came to creating the maze definitions there were certain aspects that needed to be taken into consideration before finalizing the maze. The project manager’s were in agreement of having all the robots navigate through the same maze to minimize the expense of manufacturing multiple mazes. The first, and most important, limitation that we had to consider was that the customer wanted the maze to fit into the front of room ECS 316 (this gave us a maximum of 8ft x 18ft). We decided to model a maze to the similar dimensions as the Fall 2017 semester. The maze that we have created will be 52in x 56in, with each room being 4in x 4in. Our choice for the room size was intended to accommodate the dimensions of the robots from both the morning and afternoon section. Currently, the dimensions of each robot are as follows:
- SpiderBot – 6in x 6 in (from leg-to-leg, but the body will fit within the rooms)
- Goliath – 5in x 4in
- BiPed – 4in x 2.5in
- AT-ST – 4in x 4in
When we were generating a maze, one aspect that we wanted to implement was situations similar to the ones from the EE 346 maze which were: (1) intersection to the left, (2) intersection to the right, (3) T-intersection, (4) left corner, (5) right corner, (6) dead end, and (7) hallway. Also, in the event that the sensor suite from a robot is inoperable, we added a ‘simplest’ path solution to the maze which the robot can navigate through to reach the finish. This is done by having the robot follow the wall to its right through the entire maze.
Design Ideas and the Reasoning Behind It
By: Miguel Gonzalez (MP: BiPed)
After noting all the information provided above it is clear that there are an infinite amount of possibilities in creating the maze. To reduce any redundancies and make sure all our set rules applied to our designed maze each project manager agreed that it would be best if every member creates a unique but adequate maze in which they are free to make their own design twists. These mazes are simply preliminary designs, once each member creates their design we will gather together and try to create a new maze that will implement each other’s maze while making sure all limitations have been accounted for.
We will begin by addressing the design ideas behind each preliminary maze drawings. The first maze we are going to take a look at is a design by Eduardo. According to Eduardo his main goal when designing the maze was to implement rooms that represented real life 4in by 4in rooms, and have a curved line following. As we can see from the image below Eduardo implemented an intermediate difficulty maze and did a good job in having turnarounds, 3-way intersections, curved UV lines, and even provided colored dots at the intersections. In terms of functionality, having curved lines in between room allows robots such as the Spiderbot and BiPed to have easier times detecting the UV lines while performing a turn. The colored dots in the intersections also allows each robot to detect when it has reached an intersection and thus knows when a turning action needs to occur.
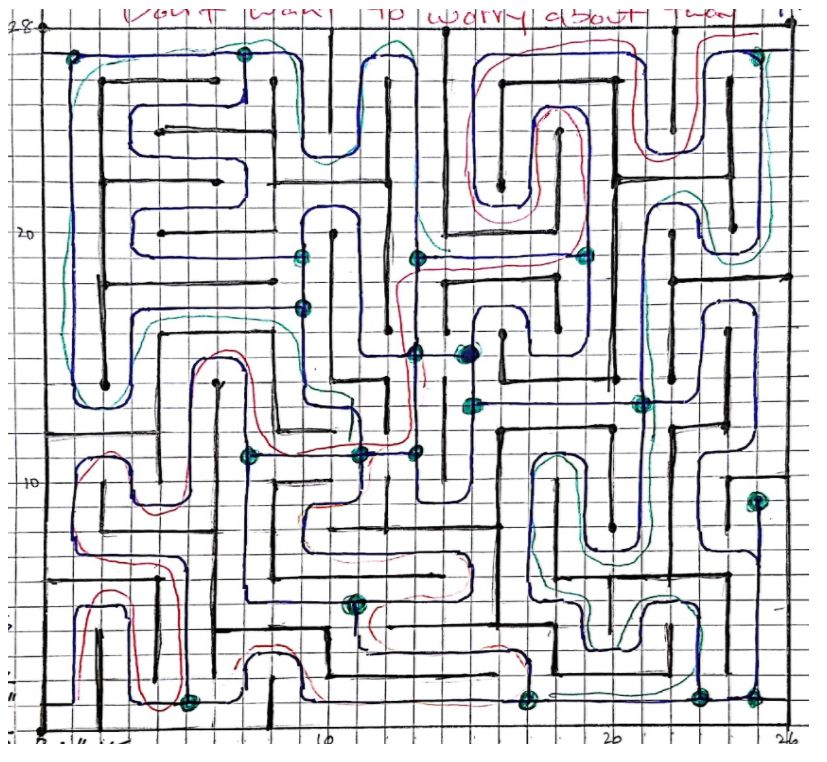
Figure 2: Eduardo (PM- SpiderBot): Preliminary Maze Design
The second design was created by me. I started the maze by creating an aspect ratio that would easily scale to the 52in by 56in life-size maze. The rooms were also scaled to model the 4in by 4in squares. It is important to keep in mind the scaling of the maze, this is to prevent errors and delays when printing out the maze. I calculated the ratios and implemented them in Microsoft Excel, where the maze was designed. For the first designed maze, I had the idea of cutting off or leaving two corners out of the maze to act as START and END pads. This sections of the maze would ideally be used as a location for teams to place their robots and begin app control while having space for any adjustment/calibration movement. Overall two designs were created but the issue for both was that the maze was a bit difficult for robots to complete. The lack of additional paths to exit also prove to be an issue as the ideal maze would account for a simple path solution in which robots having a hard time responding to its sensor inputs can use.

Figure 3: Miguel (PM-BiPed): Maze with START and END zones

Figure 4a: Miguel (PM-BiPed): Maze 2 Figure 4b: Miguel (PM-BiPed): Maze 2 Solution
The final maze design was created by Ernie Trujillo. From Ernie’s design, we can see that the maze has 13 rooms across and 14 rooms vertically giving us a total of 182 rooms. Each room will be 4” x 4’’ and the width of the lines will be 1cm thick ~ .393 inch. The maze has more than one path to exit and Ernie made sure to make the shortest path one that would allow for right wall following in the event a robot’s intersection detection code fails. As can be seen below, the maze is scaled at a slightly larger size from the existing maze scale. This is due to the fact that the initial sketch Ernie designed was made to have a 52’’ x 56’’ scale (like existing maze), however, like Eduardo’s design, Ernie didn’t account for line width. As a result, the maze has to accommodate an additional 13 cm across and 14 cm vertically, resulting in the maze dimensions being approximately 57’’ x 61.5’’.

Figure 5: Ernie’s Maze (Goliath PM)
Final Design Decision
(by Eduardo De La Cruz – Spiderbot PM)
Having had taken into account all the constraints, design ideas, and making sure that the maze would accommodate all off our designs. We as a group decided that Ernie’s design was the best choice in defining what the maze should look like. Unlike the other mazes’ Ernie’s maze provides a simple path (shortest path) for robots to exit implementing the right wall rule as a fail-safe. It also has more than one not overly complicating path to reach the exit, which is important when it comes to the time it will take to finish the mission. Additionally, Ernie’s maze incorporates multiple dead ends which will come in handy in the robot avoidance part of the mission, and has multiple 3 way, and T-intersections. Each room will be 4’’ x 4’’ and will incorporate both UV lines and colored dots for intersection detection.
A to scale model of Ernie’s maze was generated below by Eduardo using solidworks showing how the maze would look if we were to print the maze. Solidworks files are included at the bottom of the post.

Figure 6: Final Design Maze
As can be seen above, the total the size of the maze will be 57.5’’ x 61.86’’. Since each robot will have its own run, the maze was designed to have only one entrance and one exit. We decided to put a UV strip along the midpoint of the rooms with line thickness of 1 cm ~ .393 inch and with rounded edges of 1 inch in radius on every corner to improve turning angles. This means we will be implementing UV sensors for line following in our robots. The material we plan on using for the fabrication of the maze will be cloth. Cloth provides a more durable surface on which to apply the UV ink. Other surfaces such as paper may experience ink fading over time. In every intersection we plan on adding colored dots 1 inch in diameter to implement color sensing for intersection type.
Below is a link to the Solidworks files, as well as a template
https://drive.google.com/drive/folders/1aZvnYXNC2wg36CWjMIFUWP1x0KuAyuNA










{kind=link}