Sojourner/Spring/2019
Choosing Motors and Servos
Author/s: Cole Bailey
Introduction
In this blog post we are going to be focusing on how we chose our motors and servos to drive the Sojourner.
Choosing the Motors
When choosing these motors we went through a process to ensure the motors would have enough power to drive the weight of the Sojourner with room to spare. While shopping around, we found that Pololu has the most variety of motors and has extensive studies and detailed specifications of each motor. We knew we needed a micro gear motor because of the size of the Sojourner so we did cross studies between different RPM values, current draw, and torque provided between different motors. The Sojourner was designed to be a replica of a mars rover, so it did not have to go fast. With this said, we found that 150 RPM medium powered micro-metal gear motors were the best way to balance the power consumption, pricing, and performance. Here are the specs of the motors we chose:
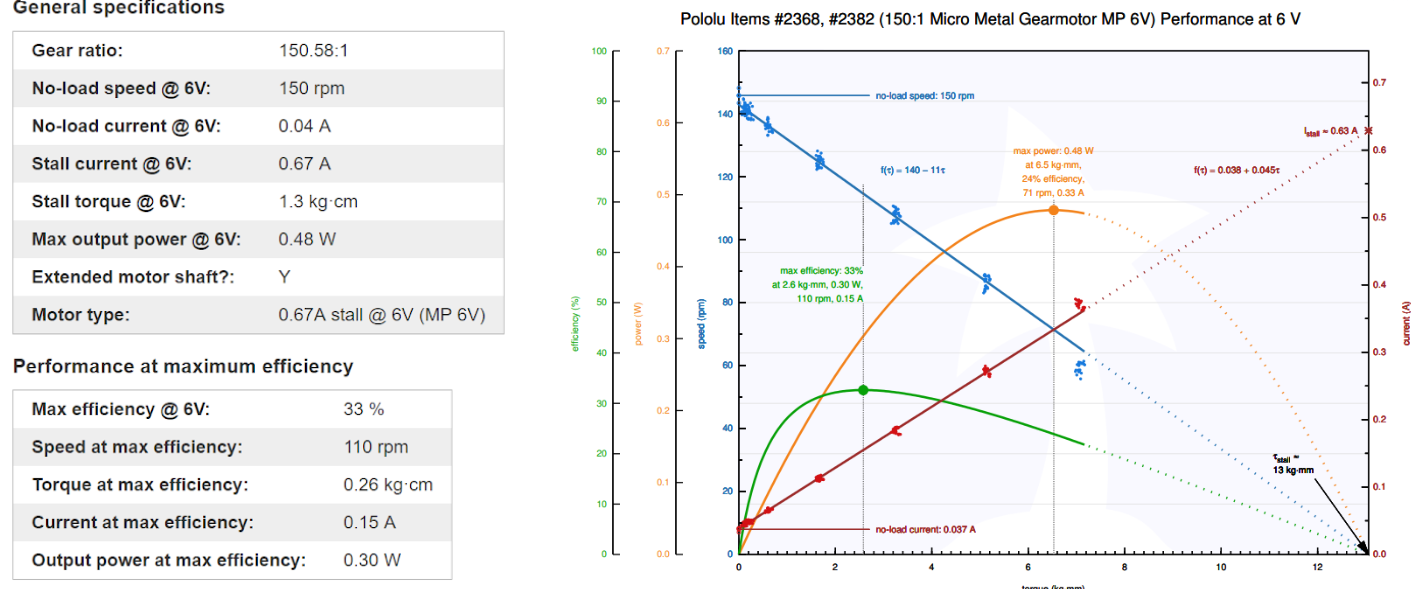
We did calculations based on the Sojourners weight and the amount of torque all 6 motors could supply to ensure that the motors could drive the Sojourner in all terrains with ease. Here are our calculations: 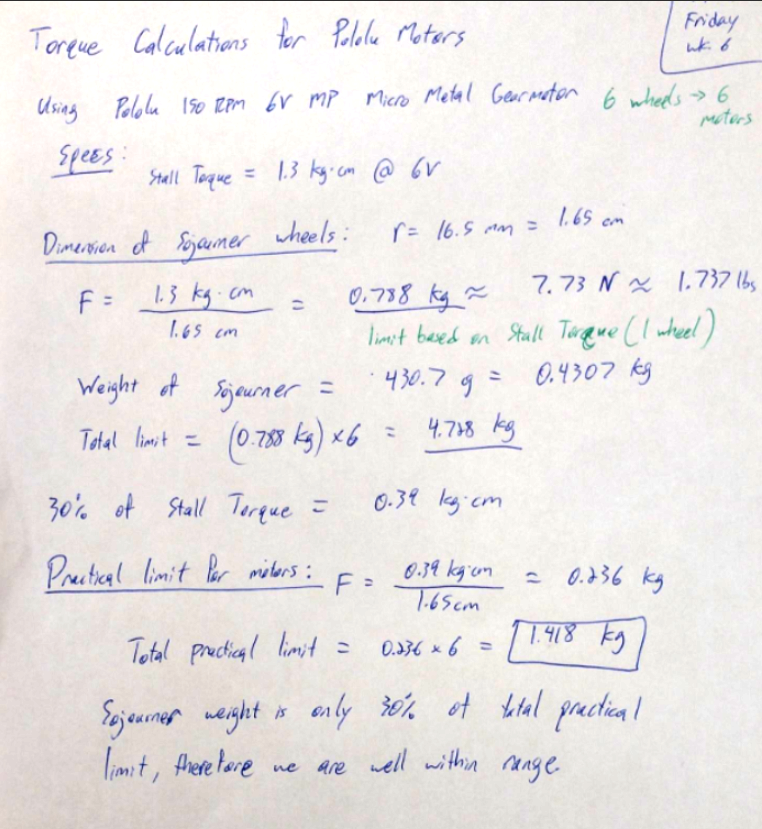
We used a torque equation Force(weight)= Torque/Radius. We had the max stall torque of the motor, and the radius of the wheel so we could find the maximum weight each motor could drive. With the 6 motors combined we had plenty of power to drive the Sojourner. Here is a picture of the Micro Metal Gear Motors we chose:

Choosing the Servos
Not nearly as much engineering went into choosing the servos compared to the motors. We really struggled to find sub-micro servos that would fit on the corners of the rocker bogie system. We found that Pololu had sub-micro servos and we trusted that they had good quality components so we bought our servos from them too. The Servos were called Generic Sub-Micro Servos.

We tested them when we got them and they worked out well for the Sojourner.
Conclusion
A few notes to keep in mind:
- Don’t order parts until you know it is what you need.
- Normally the more expensive part is better, but not always.
- The more documentation on the part, the better.
This is how we chose our motors and servos for the Sojourner, and it worked out well. For the motors we made sure we had plenty of room for error and it helped us out in the end.