{kind=link}
Chop Suey: Chopped
By Matthew Clegg – Computer & Control Systems
Many issues were faced when working with prototype Chop Suey. During the initial stages of coding, a single servo was connected to a single breakout board, with power being supplied by a DC power supply in a CSULB classroom. When code was uploaded, the servo would execute what it was instructed to do. This was the case when servos were connected for two legs of Spiderbot (6 servos, 3 servos per leg).
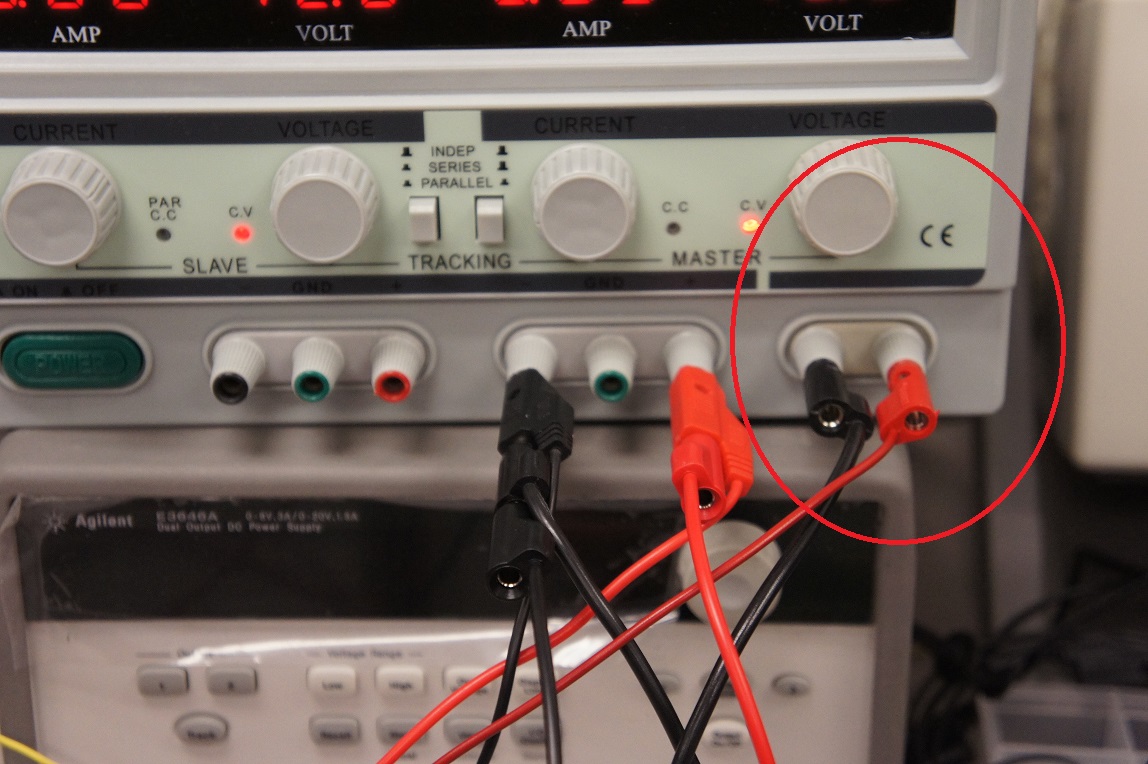
When more than two legs were connected to the breakout boards, Chop Suey seemed to have a mind of its own. Since the cause of the issue was not known, current was increased to its maximum for 6V on the power supply. The same issue occurred, so different inputs of the power supply were tried. The best results initially occurred when the leads for the breakout boards were connected to the fixed voltage and fixed current inputs for the power supply. After discussion with the creator of Chop Suey, David Gonsalez, it turned out that similar issues were faced in the previous semester because the DC power supplies do not provide enough current for sufficient control of all the servo motors used by Spiderbot.
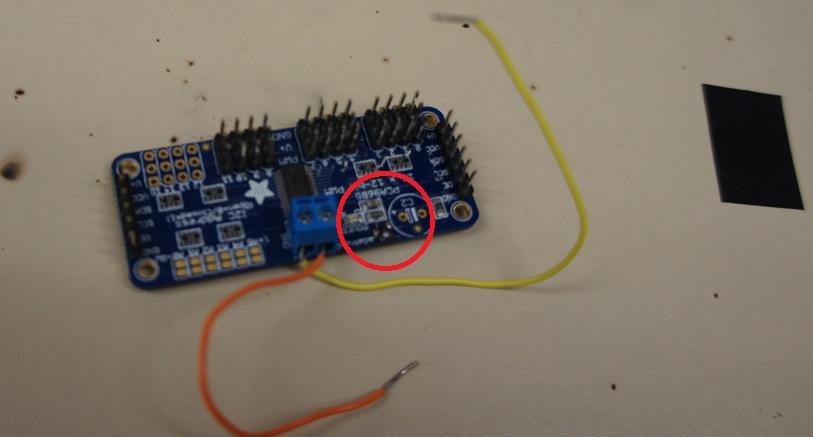
Though this input allowed for better control of the servos, it ultimately caused one of the breakout boards for Spiderbot to smoke and no longer function properly. In that situation, too much current was being provided to the boards.
Luckily, Hexapod, Spring 2014 had extra breakout boards for purchase, so Spiderbot group is very grateful for that. The upside of this downfall, however, is that the reasoning for using breakout boards as a form of protection from damage for the Arduino and the servo motors has been verified, seeing as to how our Arduino Uno and all of our servo motors are still operating properly.