The System Engineering Method

Expand a topic for assignments and linked lectures.
#1: Welcome to TRC “The Robot Company”
Quote of the Day
“…I hit the interview with Northrop-Grumman out of the park. I had the one interviewer leaving the room saying he wanted his money back from his undergrad after hearing about the content I learned being in EE400D.”
1. The Robot Company Work Breakdown Schedule
2. Write and Submit Cover Letter and Resume
Your first writing assignment is to generate and submit a Job Application to The Robot Company. This will be great practice for the cover letters and resume you will be writing for the upcoming job fairs. The hyperlinked document includes everything you will need to get started, including:
#1.5: The Engineering Method
Quote(s) of the Day
“Each week (day, hour,..) is less important than the week (day, hour,…) before.”
Corollary
Research
Research Presentation Template
“Engineers should always try to build on what has already been done before. Information on related problems that have been solved or unsolved may help engineers find the best solution.”
|
Research Case Studies
#2: Stakeholder Expectations
Prepare 1 slide per subject, with the total not to exceed 8 slides and take no more than 8 minutes to present.
For grading purposes, please follow this outline exactly, do not deviate.
The Prosthetic Arm used the Dunker method to discover the VA hospital solution (do not have an amputee, do have an amputee)
Make solar panels lighter (based on incorrect problem statement), make solar panels heavier – move cg lower so it does not tip over. In this case study, the Dunker method helped the team discover the real problem.
#3: High Level Requirements
#4: Derived Requirements and Modeling
#5: Realistic Constraints and Standards
#6: Preliminary Design Review
Project Meetings
Division Meetings
MST
E&C
Manufacturing
Quality Assurance
#7: Career
Project Meetings
Division Meetings
MST
E&C
Manufacturing
#8: Preliminary Design Review (PDR)Preliminary
PDR
#9: Critical Design Review (CDR)
#10: Critical Design Review (CDR)
#11: CDR Presentations and Project Demonstrations
CDR Project Presentations and Demonstrations
#12: Final Documentation
CDR Review
#13: Project Implementation
#14: Housekeeping
During the final week of class (not during final’s week) teams will return parts on loan or purchased with University funds and not required in support of the demonstration. Please bring paper versions of all relevant emails and receipts to expedite the process.
#15: Final Information Filing
During the final week of class (not during final’s week) teams will return parts on loan or purchased with University funds and not required in support of the demonstration. Please bring paper versions of all relevant emails and receipts to expedite the process.
Organized list view of all lectures.
The EE400D Robot Company
Table of Contents

|
In my experience, projects just seem to work best with a balanced matrix type of organization. This is because the resources of the company are permanent (or relatively permanent) and projects are not. A project is a temporary undertaking with a known ending. Project teams are formed for the life of a project. This means that we are able to bring the right resources together for a project and use them for the amount of time they are needed. Organizing the Organization for Project Management |

Table of Contents
NASA System Engineering Handbook Section 6.1.2.1 “Work Breakdown Structure” and Section 4.3.2.1
“Product Breakdown Structure.” Also, review page 312 Figure G-1 where a PBS Example is provided.
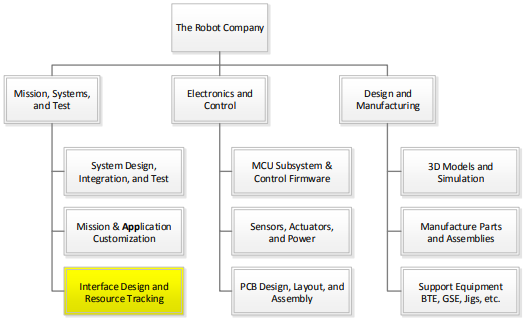
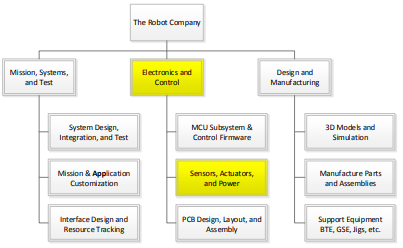
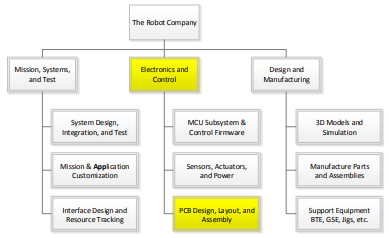
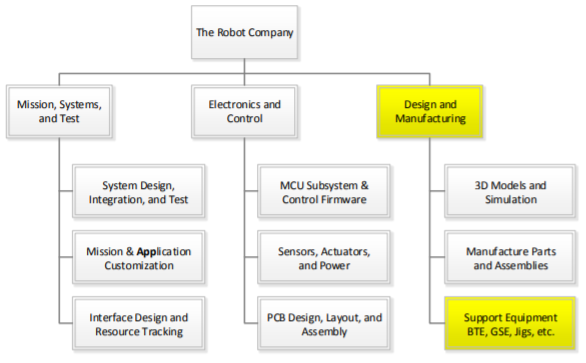
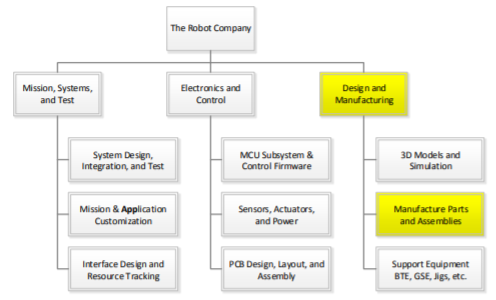
This document describes how The Robot Company is structured technically known as the Company Work Breakdown Structure (WBS). From your perspective, the WBS describes your responsibilities within the company. In that spirit, I have worded the sections in the form of Job Descriptions and named the document accordingly.
|
As the names imply the WBS provides a breakdown of the work that needs to be accomplished to build the product, while the PBS provides a breakdown of the product ITSELF. |
During the first phase of the project, your manager will create a project WBS, based on this one but adapted to your specific robot. Later in the semester, you will hear the term Product Breakdown Structure (PBS). The PBS describes the parts (functional blocks) of the robot. The PBS is the responsibility of the System Engineer.
To make sense out of the following material, please refer to the Company Matrix Organization Chart presented earlier and the Figure 1 Company Work Breakdown Structure. To learn more, read Section 6.1.2.1 “Work Breakdown Structure” and Section 4.3.2.1 “Product Breakdown Structure” in the NASA System Engineering Handbook. On page 312 Figure G-1 a PBS Example is provided.
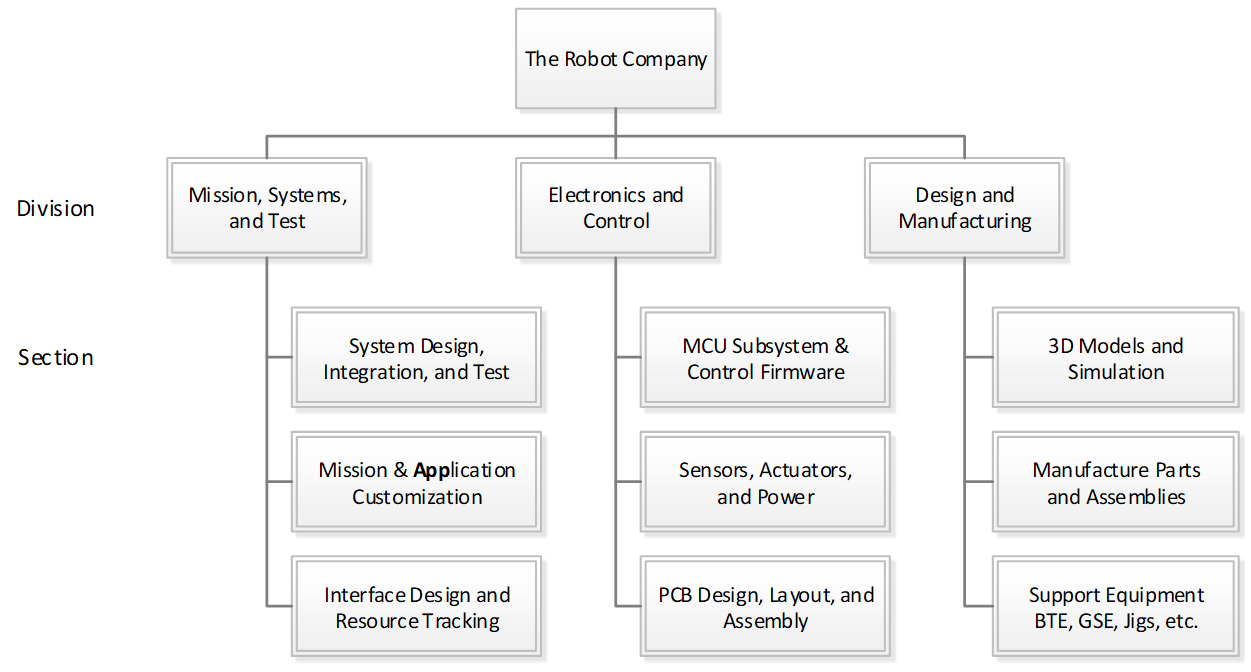
Figure 1 Company Work Breakdown Structure
If the parts of an organization (e.g., teams, departments, or subdivisions) do not closely reflect the essential parts of the product, or if the relationship between organizations do not reflect the relationships between product parts, then the project will be in trouble … Therefore: Make sure the organization is compatible with the product architecture – Conway’s law
Task Summary:
The president is responsible for the management of all Robot Company projects. Coordinate working from the customer’s mission objectives to develop the program requirements for each project. Will allocate limited financial resource between projects.
Task SummaryAs the president, you will be responsible for the management of all Robot Company projects.
Working from the customer’s mission objectives, you will develop the program requirements for each project.
You will also work with the customer to allocate limited financial resources between the projects. You will be scheduling all project deliverables including the Project Plan, Preliminary and Critical Reviews and Associated Documents.
You will be working closely with our project managers helping them manage cost, schedule, and performance, including…
Working with the project and division managers, you will also identify areas of synergy between the projects allowing better utilization of limited engineering resources.
Keep close communication with joint projects (cross course integrated projects) to ensure each division manager, project manager and engineer are in agreement and compliance with the Interface Control Document (generated by Mission, Systems and Test Division). Requires close communication and collaboration with the presidential counterpart in second-course section.
Along with the customer and management staff, you will, on a periodic basis, assess each project and division manager’s performance.
Qualifications
An educational background in business and/or management experience, or a desire to learn is a plus.
The QA Engineer working with the project and division managers, will insure that project plans, documentation, presentations, and blog posts are consistent with those generated by working engineers and reflects well on the CSULB COE and EE department.
Task SummaryInsure quality is built into each project. For example, is the robot easily assembled and disassembled. Does the robot not undergo “Rapid Unscheduled Dissembly” RUD.
Cabling
Although, typically not the responsibility of the Quality Assurance Engineer, you will take the “interface definition” to the next level down by defining the “cable tree” for each project. To accomplish this task you will working with the system, electronics and control, and manufacturing subsystem engineers, from each project to specify analog/digital signal and power connectors, cables, and how they will be routed (the tree). Specifically, insure NO wires are exposed and all cabling includes connectors and routing is designed-in.
Factor in interference with other design elements and how to keep the overall cleanliness of the design. In other words, when assembled, the product should not look like a rat’s nest.
Blog Posts
Manage the class website. The QA engineer is the gate keeper insuring that all blog posts meet all requirements before posting.
Make an effort to attend project and division meetings.
Define projects level 1 requirements, hold project meetings, manage and keep tasks on schedule. Working with your team to make your robot a success. Success will be defined by meeting cost, schedule, and performance requirements.
Task SummaryThe successful candidate(s) will manage one of our Robot Projects. You will initially be negotiating with the division managers to build your project team.
Next, you work with the system engineer to define your project unique WBS. You will assist the System Engineer in developing the PBS.
Working with the customer, you will write the Level 1 Program requirements. Working with the System engineer, you will next write the Level 1 Project requirements. These requirements will be codified in the Project Plan.
You will then be working with your team to make your robot a success. Success will be defined by meeting cost, schedule, and performance requirements.
Qualifications
An educational background in business and/or management experience, or a desire to learn is a plus.
Assessment
During the semester, on a periodic basis, the project manager will assess the performance of each engineer within their project. At the same time, the president and management staff may also grade the members of your team. The instructor shall take these recommendations into consideration when assigning grades to engineers within your project.
Meetings
The Project Manager leads a weekly project meeting. As part of the meeting, the project manager should assign someone to take the meeting minutes. The project manager is responsible for editing these minutes and uploading them to BeachBoard in a timely manner. Keep president informed of weekly project meeting date, time and location for occasional attendance.
The Project Manager is responsible for scheduling a weekly meeting with the President. This meeting may be as short as 15 minutes. The meeting may occur during the lab time. The project manager is responsible for taking the minutes during the meeting. An edited version of the minutes are to be provided to the president and the instructor prior to the next meeting.
Project Video
The project video is the last deliverable provided by the project. Its objective is to act as a recruiting tool for high school students considering electrical engineering at CSULB. It should also showcase our work to the COE and its corporate sponsors. The video must also present the engineering process as applied to the design and construction of your project. Points earned are “bonus.” The project manager may want to assign video production to someone with video editing experience or a team member who could benefit from the “bonus” points assigned.
Final Documentation
Although Physical copies of reports are still alive and well in industry, to keep the instructor’s office as uncluttered as possible, we will be storing all our documents on the cloud.
The project manager is responsible for compiling, organizing, and editing the key documents and reports (selected blog posts) generated over the semester by the project into a Final Documentation Blog Post. This will ensure your documentation and videos are not lost over time.
Present training material to the division members in the form of hands-on lectures and assess learning with assignments and/or exams. Manage cross-links between projects and find and manage resources within your division.
Task SummaryThe first task of the Division manager will be to assign engineers within his or her division to each project.
Division managers, at their discretion, may also assign an engineer to be a section manager. If not assigned, the Division manager will act as the section manager.
Over the course of the project, you may dynamically reallocate your engineering resources due to:
Present training material to the division members in the form of hands-on lectures and assess learning with assignments and/or exams.
During the semester, the division manager shall provide reading and/or homework assignment to help division members learn the material. On a periodic basis, no less than every 2 weeks, the division manager will assess the performance of each engineer within their division by giving a quiz. The quiz shall be over a set time limit, where the division members may, at the managers discretion be allowed a sheet of notes. It is important to distinguish between helping division members learn the material and assessing their mastery of the material.
Learning assessment grades shall form a part, but not the totality of this grade. At the same time, the president and management staff may also grade the members of your division members. The instructor shall take these recommendations into consideration when assigning grades to engineers within your division.
Meetings
The Division Manager leads a weekly division meeting. As part of the meeting, the division manager should assign someone to take the meeting minutes. The division manager is responsible for editing these minutes and uploading them to BeachBoard in a timely manner. Keep president informed of weekly division meeting date, time and location for occasional attendance.
The Division Manager is responsible for scheduling a weekly meeting with the President. This meeting may be as short as 15 minutes. The meeting may occur during the lab time. The division manager is responsible for taking the minutes during the meeting. An edited version of the minutes are to be provided to the President and the instructor prior to the next meeting.
Divison Manager
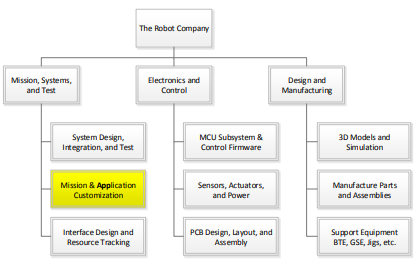
Manage the Mission, Systems and Test Division and associated sections. See the Division Manager section for a general job description. Responsibilities of the engineers within this division are described in the following subsections.

Resources:
Task Summary:
First task will be to work with each project manager to define unique WBS for each project. Working from the WBS and subsystem engineers, define the PBS.
Working with the project manager, help develop level 1 program and project requirements. The project manager is ultimately responsible for generating Level 1 program requirements. Working from the level 1 requirements, and with the subsystem engineers, write the level 2 system and subsystem design requirements. Subsystem engineers are ultimately responsible for the generation of subsystem requirements.
Working with customer and each system engineer, develop a product requirement verification and validation test plan. This plan includes the tests to be conducted to verify requirements and validate the design. Avoid qualitative definitions like “visual inspection.”
Part of the plan includes a summary verification/validation checklist. The checklist breaks down requirements by numbering them, stating the requirement, providing rationale for the requirement, and then breaking down the level of success of the requirement into a percentage.
Finally, a good system engineer looks at the project as a “complex system” and how it might fail or not meet customer expectations during the mission (Project Validation). This is a critical part of ConOps (Conceptual Operations) whose purpose is to discover holes in the definition of the design (the intangibles) before the start of the mission.
Here are some examples of ConOp failures.
A vacuum system for use in a lab might be defined in millimeters of mercury (mmHg), but once the machine is built the noise generated (decibels) makes it useless for use in a lab environment.
The stability of a walking robot might be defined by the impact of a rod of radius r (cm) located at a given distance d (cm) at height h (cm) from the robot, with mass m (kg) moving a velocity v (cm/sec) for a period of t seconds. The robot is designed to pass this test, only to fall over if a lesser force is applied. So the robot passes the defined test but fails the spirit of the requirements.
The field-of-view (FOV) of an articulating camera mirror system mounted on a rover is not defined. On the day of the final half of the camera’s FOV is the floor.
A pan and tilt subsystem is designed and tested to meet FOV requirements only to discover when mounted on the spider robot that the pan and tilt subsystem impacts the leg servos when panned down.
A large capacitor on a PCB was designed to close to an IR sensor connector preventing the sensor from being plugged into the robot.
Programming is not a traditional role for a system engineer, but moved to this level to focus additional attention onto this too often forgotten area.
Task Summary:
Configure the application software required to remotely control the robot. Control may be done from a PC and/or cell phone (Android or iPhone) application.
If no off-the-shelf application exists to remotely control your robot, it will be necessary to generate this code. If the project falls within this category, it will be useful to have a background in programming in one or more high-level scripting languages like Processing, HTML 5, Java, or MATLAB.
Working with the electronics and control subsystem engineer(s) within each project, document the System Interface Design, which includes the System Block Diagram and Interface Design Matrix.
The system engineer, working with the electronics and control and manufacturing engineer, is responsible for defining the power distribution strategy (star and/or multipoint) at the PCB and System level.
In some cases, projects will be interfacing with another project. Fall ’16 examples include the Prosthetic Arm (Wednesday class) to the Prosthetic Hand (Thursday class) and the Pathfinder Solar Panels (Wednesday class) to the Pathfinder Chassis (Thursday class). For these projects, the systems engineers will work together to write an ICD documenting the electrical connectors and cabling, power, mechanical, and other interfaces associated with the integration of the two projects. Work closely with MST counterpart in other class section, project managers for each project, and president from each class to ensure ICD is being followed. Encourage joint project meetings throughout the life of the project to help maintain communication between groups.
Manage all applicable system resources. Resource management typically includes, but is not limited to, mass and power. For example, on a spacecraft, Field-of-View is a resource. When reporting to management, please include margins and contingencies. Margins are applied based on uncertainty in a given line item. Contingency is applied across the resource and is a function of the system resource budget minus the expected value and total margin. Resource reports should be updated on a periodic basis, typically defined by the president. As a rule of thumb, resource reports should be updated every other week and included in the meeting minutes.
Division Manager
Manage the Electronics and Control Division and associated sections. See the Division Manager section for a general job description. Responsibilities of the engineers within this division are described in the following subsections.

Task Summary:
Write software subroutines and functions as defined by the software system block diagram. For robots implementing complex motion algorithms, this includes creating a data structure array in SRAM or Flash program memory to define the motion.
Specifically, responsibility of the electronics and control engineer will be to write the firmware required to translate commands into control signals to the actuators, read sensors and translate into data bytes, and implementation of any control algorithms. Communication with the Bluetooth module and decoding of command packets is the responsibility of the systems engineer. The systems engineer is also responsible for collecting and packetizing the data bytes and subsequently sending them to the Bluetooth module.
Qualifications
A background with embedded systems, the Arduino IDE, and the C++ programming language or a desire to learn is a plus.
Develop a software system block diagram. The description of the block diagram should define the function of each module and how they will communicate. For example, number of arguments and their data type, plus return value and data type.
The Micro-Controller Unit (MCU) Communication firmware[1] receives and decodes commands and sends telemetry to the Bluetooth device on the robot. The software’s responsibility stops once a command is decoded. For most projects, the E&C engineer will adapt existing C++ programs written within the Arduino IDE for this purpose.
If the project does not fall within the category of having an off-the-shelf application to decode commands and send telemetry, then it would be necessary to have a strong background in programming in C++.
To control actuators and read sensors, software will interface with the peripheral subsystems of the microcontroller including: Timers (e.g., Fast PWM mode), ADC, TWI, SPI, EEPROM, and USART. The Robot Company has developed extensive material on working with the ATmega328P and on how to program its subsystem modules in C++.
The successful candidate(s) will be responsible for the onboard software associated with the stability and tracking control of the robot. Most robots will implement one or more PID control algorithms.
Control input will typically be from an IMU.
For this sub-task a background in embedded systems, C++ programming, and control theory (EE470 and EE471) or a desire to learn is a plus.
[1] Software located in Flash program memory.
Task Summary:
Electronics and control engineer is responsible for selecting and implementing the sensors, actuators and power subsystem to be carried on the robot.
Sensors can be as simple as a resistor divider to measure battery voltage and as complex as a SLAM mobile device. In the following paragraphs, sensors typically found on a robot will be discussed.
For measuring target distance, a number of sensors need to be considered including IR, Lidar, Ultrasonic, or camera. Trade-off studies to select a sensor should consider how measurement errors are introduced by the environment (e.g. lighting, reflections, and target surface properties). Also consider the peripheral subsystem required by each sensor type. These may include the ADC or a serial peripheral interface like the I2C, SPI, 1-wire, and USART. A wealth of information can be found on the Internet and here.
For measuring the distance traveled by a robot, consider the addition of a shaft encoder. The trade-off study should investigate traditional (opto and hall effect sensors) and sensorless (commentator and back emf) solutions for measuring the rpms of a DC motor.
For measuring angular rotation and/or velocity to control the stability and tracking of the robot, consider gyro, accelerometer, and magnetometer or some combination of all three incorporated into an Inertial Measurement Unit (IMU). If an IMU is adopted, sensor data may be smoothed using a Complementary or Kalman Filter algorithm. Some commercially available modules incorporate both the IMU and filter.
For measuring battery state, purchase a fuel gauge or simply use a resistor voltage divider.
An actuator is defined as any output device. This includes optical devices like LEDs and Lasers. It also includes electromechanical devices like solenoids, servos, and motors.
Specification of electromechanical devices, like servos and motors, should be based on quantitative system/subsystem design requirements. From these “specifications”, a trade-off study is typically conducted. The trade-off study usually takes the form of a table where the robot’s desired specification for the electrometrical part is in the first column. The subsequent columns contain the specifications gleaned from the datasheet of candidate commercial off- the-shelf (COTS) parts. The selected parts are then purchased and tested against the original robot specification. These tests should consider static and dynamic loads plus life-cycle testing under worst case load conditions.
Up to the Spring 2016 Semester, no SpiderBot has ever completed its mission due to insufficient static and dynamic modeling (back of the envelope and at 3D modeling) at the system level, mass resource management, and life-cycle testing under load conditions.
Electromechanical devices are often combined into subsystems. Robots’ subsystems may include the powertrain and a pan and tilt platform.
The powertrain includes: DC motors and/or servos, transmission (the “gearbox”), and drive electronics (H-Bridge, Shift Register, Power Transistors …). For this subsystem, an educational background in motors and motor control (EE451) or a desire to learn is a plus.
For the robots, the pan and tilt platform carry the mobile device (Android or iPhone). Actuators may include a stepper motor or servo for panning and almost always a servo for tilting.
For most robots, a Bluetooth module will be incorporated into the design.
The power subsystem may include batteries, charging circuits, DC-to-DC converters, and voltage regulators (linear and LDO). For some robots, consider the addition of solar panels.
DC-to-DC converters may step-down (buck) the input voltage, step-up (boost) the input voltage, and in some cases both. A step-down (buck) converter is also referred to as a UBEC which stands for “Universal Battery Eliminator Circuit”.
Research battery solutions based on quantitative subsystem requirements, resource reports (mass and power), and project requirements (mission duration, safety, etc.). Battery technologies include, but are not limited to, NiCD, Nimh , LiFePO4, and Li-Ion/Polymer. Based on requirements, other power sources may be investigated such as solar.
Task Summary:
Working from the PBS, System Block Diagram, and Interface Matrix, provided by the system engineer, the electronics and control engineer designs the robot’s Printed Circuit Board (PCB). Working from the provided material, the electronics and control engineer also creates a Fritzing diagram, makes and tests the breadboard, and captures the design, in the form of a schematic, using CAD software (typically Eagle CAD). The manufacturing division is then responsible for laying out the PCB and providing to the Electronics engineer a completely assembled PCB. The electronics and control engineer is then responsible for testing the completed PCB.
Task Summary:
Working from a schematic, provided by the electronics and control engineer, the power distribution strategy, provided by the system engineer, and the physical constraints of the robot, the manufacturing engineer will design the printed circuit board (PCB), perform ERC and DRC checks, generate the CAM file and upload to a PCB house for fabrication. This process is typically carried out using Eagle CAD.
In addition to the PCB, it will be necessary to purchase the SMT solder paste stencil used for applying paste to the PCB as part of the reflow soldering process. The design of the stencil is generated in Eagle CAD and output as a Gerber file.
Once the PCB and stencil are received, the manufacturing engineer is responsible for reflow soldering of the SMT discrete components and ICs onto the board, as well as hand soldering through-hole discrete components. The board is then given to the electronics and control engineer for testing.
Division Manager
Manage the Design and Manufacturing Section. See the Division Manager section for a general job description. Responsibilities of the engineers within this division are described in the following subsections.

Task Summary:
The successful candidate(s) will use a solid modeling computer-aided design (CAD) and computer-aided engineering (CAE) software program, typically SolidWorks, to design the mechanical parts, sub-assemblies, and even the robot itself. The overall design must take into consideration all parts manufactured and purchased. The most commonly forgotten parts are the connectors and cabling.
Working with the systems engineer, determine the acceptability of the design by running simulations. These may be in the form of system level animations (e.g., for bipedal robots the walking motion while tracking center of mass), system level load and shear analysis (e.g., for spiders a stress analysis across the body-servo-leg interfaces), and others as seen appropriate.
Qualifications
Work experience with a 3D modeling program or a desire to learn is a plus. Preferred modeling program is Solidworks; however, a working knowledge of Blender, AutoCAD, SketchUp or any other CAD/CAE program will be taken into consideration.
During the design and development phase, E&C engineers will need to test electronics. The manufacturing engineer shall provide support in the design and fabrication of any Bench Test Equipment (BTE), Ground Support Equipment (GSE), and Test Jigs on an as needed basis.
Task Summary:
Parts may be fabricated using additive (3D printers), subtractive (CNC, laser cutter, lathe …), or other (vac-u-form, molds …) manufacturing techniques. It is important to work with the manufacturing Division Manager to find the manufacturing technology required for the project.
Specify and order miscellaneous parts including:
The customer has a large number of fasteners, powertrain components, and other hardware. Otherwise, purchase such parts from Home Depot and McMaster-Carr among others.
The manufacturing engineer of a robot has a friend with a 3D printer. He asks his friend if she will print the parts for their robot. The friend agrees, assuming that the STL files will be provided within a few weeks.
Case 1: Near the end of the semester, the friend receives the STL files and realizes that they simply do not have time to print the parts. What should the manufacturing engineer have done to avoid this problem?
Case 2: The STL files are provided within a few weeks. However, the friend says her 3D printer is broken and she simply does not have time to fix it. Because the engineer now has time to recover from this disaster, instead of running around asking everyone if they have a 3D printer or purchasing time on a 3D printer, he contacts the Division Manager for help. The Division Manager bring up the problem at the next division meeting and another 3D printer is located. This is the strength of the matrix organization!
Design
Testing
Printed Circuit Board
Software
Other
Table of Contents
In your job application cover letter please answer the following questions.
4. EE400D Unique Career Path
[1] If you are not sure where to start see Appendix A Why Do Students Choose Engineering?
[2] If you do not have any work experience you may include relevant classes.
[3] For example, talent or machines you have access to on campus (e.g., mechanical engineering machine shop, on campus projects, organization like the IEEE, SWE, etc.), at work or home.
Students rarely have direct exposure to engineering.
Table of Contents
The following document paraphrases and quotes material originally contained in the NASA Systems Engineering Handbook NASA-SP-2007-6105-Rev-1 Section 4.0 System Design (page 31)
System engineering design is a highly iterative and recursive processes, resulting in a validated set of requirements and a validated design solution that satisfies a set of customer expectations.
After Mission Authorization (i.e. funding), the process Starts with a study team collecting and clarifying the Customer’s Expectations, including the program objectives, constraints, design drivers, mission profile[2], and criteria for defining mission success.
 From the customer’s expectations high-level requirements are defined. These high-level requirements drive an iterative design loop where (1) creative “strawman” architecture/designs, (2) the concept of operations (ConOps), and (3) derived system and subsystem requirements are developed.
From the customer’s expectations high-level requirements are defined. These high-level requirements drive an iterative design loop where (1) creative “strawman” architecture/designs, (2) the concept of operations (ConOps), and (3) derived system and subsystem requirements are developed.
This process will require iterations and design decisions to achieve consistency (design loop blocks 1 – 3). Once consistency is achieved, analyses allows the project team to validate the design against the customer’s expectations. A simplified validation asks the questions:
The output of this step will typically result in modification of the customer’s expectations and the process starts again. This process continues until the system—architecture, mission profile, and requirements and stakeholder expectations achieve consistency.
The number of iterations must be sufficient to allow analytical verification of the design to the requirements.
The design process is hierarchical and recursive by nature with the same process applied to the next level down in the program – one person’s subsystem is another person’s project.
| Note: It is extremely important to involve the customer in all phases of a project. Such involvement should be built in as a self-correcting feedback loop that will significantly enhance the chances of mission success. Involving customer in a project builds confidence in the end product and serves as a validation and acceptance with the target audience. |
Remember, validation occurs over the life of the product (from concept to retirement).
Sponsor presents Program and/or Mission Objectives
Reference: NASA Systems Engineering Handbook Section 4.2 Technical Requirements Definition Start (page 40) and Appendix C page A: 279
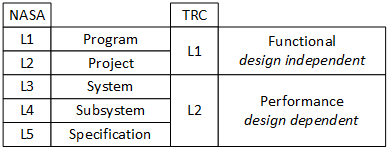
Figure 1. Requirement Levels
The word “creative” appears less than a half dozen times in the 360 page NASA Systems Engineering Handbook. I will therefore rely on outside sources.
The following document paraphrases and quotes material originally contained in the NASA Systems Engineering Handbook NASA-SP-2007-6105-Rev-1 Section 4.3 Logical Decomposition (page 49)
“Logical Decomposition is the process for creating the detailed functional requirements that enable NASA programs and projects to meet the stakeholder expectations. This process identifies the “what” that must be achieved by the system at each level to enable a successful project. Logical decomposition utilizes functional analysis to create a system architecture and to decompose top-level (or parent) requirements and allocate them down to the lowest desired levels of the project.”
TBD
[1] For more on this subject see Week 3 “Requirements” document on page 10.
Source: NASA Systems Engineering Handbook NASA-SP-2007-6105-Rev-1, Section 5.3 Product Verification
While the approaches taken to verify and validate a design may be similar, the reason behind the tests are different. Verification tests confirm that Project Objectives for the design (ex. the robot) as defined by its level 1 and level 2 design requirements are met. Validation tests confirm that the design can accomplish its mission. For our robots this is defined by the Mission Profile.
|
Here is a simple way to understand and remember the difference between verification and validation.
Verification – was the product built right?
Validation – was the right product built?
|
Like the design process, verification and validation are hierarchical by nature with the same process applied to the next level down in the program – one person’s subsystem is another person’s project.
Source: NASA Systems Engineering Handbook NASA-SP-2007-6105-Rev-1, Appendix D: Requirements Verification Matrix
When developing requirements, it is important to identify an approach for verifying the requirements. The requirement verification matrix defines how all design requirements are verified. The matrix should identify each requirement by a unique identifier and be definitive as to the source. The example shown provides the minimum information that should be included in the verification matrix.
Table D‑1 Simplified Requirements Verification Matrix
| Requirement No. | Paragraph | Shall Statement | Verification Success Criteria | Verification Method | Results | PASS / FAIL |
| P-1 | 3.2.1.1 Capability: Support Uplinked Data (LDR) | System X shall provide a max. ground-to-station uplink of… | 1. System X locks to forward link at the min and max data rate tolerances 2. System X locks to the forward link at the min and max operating frequency tolerances | Test | ||
| P-i | Other paragraphs | Other “shalls”in PTRS | Other criteria | xxx | ||
| S-i or other unique designator | Other paragraphs | Other “shalls”in specs, ICDs, etc. | Other criteria | xxx |
Source: NASA Systems Engineering Handbook NASA-SP-2007-6105-Rev-1, Appendix E: Creating the Validation Plan (Including Validation Requirements Matrix)
When developing a design, it is important to identify a validation approach for demonstrating that the system (robot) can accomplish its intended mission. Validation testing is typically defined and conducted by the customer.
To simplify the course, a single validation grade will be assigned at the end of the mission.
High-Level Program/Project Requirements and Expectations: These would be the top-level requirements and expectations (e.g., needs, wants, desires, capabilities, constraints, and external interfaces) for the product(s) to be developed. (Section 4.1.1.3)
ConOps: Concept of Operations – This describes how the system will be operated during the life-cycle phases to meet stakeholder expectations. It describes the system characteristics from an operational perspective and helps facilitate an understanding of the system goals. (Section 4.1.1.3)
SE: Systems Engineering is the art and science of developing an operable system capable of meeting requirements within often opposed constraints. Systems engineering is a holistic, integrative discipline, wherein the contributions of structural engineers, electrical engineers, mechanism designers, power engineers, human factors engineers, and many more disciplines are evaluated and balanced, one against another, to produce a coherent whole that is not dominated by the perspective of a single discipline. (Section 2.0 Fundamentals of System Engineering)


Table of Contents

After Mission Authorization (i.e. funding), the process Starts with a study team collecting and clarifying the Customer’s Expectations (The Problem Statement), including the program objectives, constraints, design drivers, mission profile[1], and criteria for defining mission success.
[1] I will use the term Mission Profile in place of Operational Objectives

As we have seen, the statement of the Customer’s Expectations may be modified as objectives are translated into requirements and the nature of the real problem is better understood.
After each iteration, make sure you are proceeding to solve the real problem as opposed to the perceived problem.

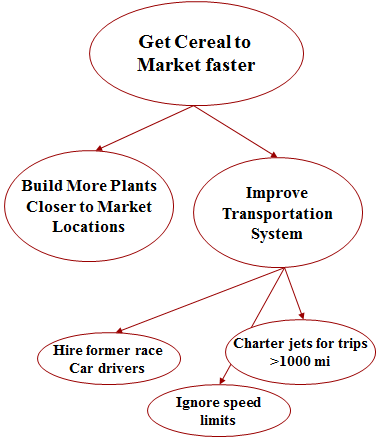
The Situation: Toasty O’s was one of the hottest selling cereals when it first came on the market. However, after several months, sales dropped. The consumer survey department was able to identify that customer dissatisfaction, as expressed in terms of taste, was related to the age of the cereal. Consequently, management determined that they must streamline the production process to get the cereal on the store shelves faster, thus ensuring a fresher product. Engineering had quite a time with this problem – there wasn’t much slack time that could be removed from the process to accomplish the goal.
Of the steps required to get the product on the shelves (manufacturing, packaging, storage, and shipping) manufacturing and packaging were the fastest so plans for building plants closer to the major markets were considered as was trying to add more trucks to get the cereal to market faster.
Sales of Toasty O’s are dropping. Consumer surveys have indicated dissatisfaction with a stale taste.
Perceived Mission Objective (The Problem):
“Streamline the production process to get the cereal on the store shelves faster, thus ensuring a fresher product.”
Second Perceived Objective:
Get the Cereal to Market Faster

Original Mission Statement
Get cereal to market faster.
The real problem was that the cereal was not staying fresh long enough, not that it wasn’t getting to market fast enough.
New Mission Statement
Make Toasty O’s boxes tighter and determine appropriate additive to slow down the spoiling reaction.
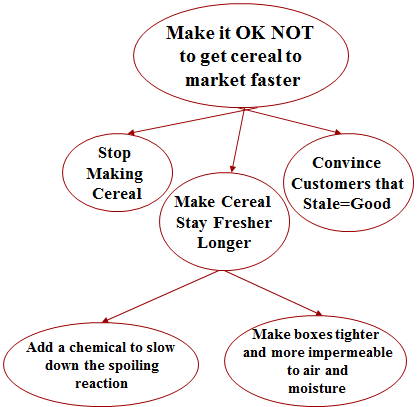
Table of Contents
Once you have Identifying the real problem and gathered needed Information it is time to search for “original” creative solutions.

| That won’t work | It’s against our policy |
| That’s too radical | We haven’t done it that way before |
| It’s not our job | That’s too expensive |
| We don’t have enough time | That’s not practical |
| That’s to much hassle | We can’t solve this problem |
| Before | During | After |
| Who is the facilitator and the participants/team? | Review brainstorming approach and rules. | Is another meeting required to continue exploring the best ideas? |
| Participant group is small, focused, and represent a cross-section of the disciplines and/or stakeholders. | Is the objective and problem clearly defined? | No – Document |
| Facilitator writes a clear definition of the objective along with a short brief of the problem and sends to the team. | Have first principles been identified. | Yes – Rinse and Repeat |
| Have participants done their homework/research? | Explore ideas! Never reject or write down anyones idea. Always write it down after multiple team members have contributed to the evolution of the idea. Have fun. | |
| Conference room and tools (whiteboard, projector, easel, etc.) in place | Determine the next step. |

Methodology
Example
How can we improve the design of a cell phone?
| Attribute | Brainstorm |
| Color could be … | Be Any color Be transparent Utilize designs such as plaid Have a personalized design (skinit) |
| Material could be … | Metal Glass (Mac Funamizu) Wood (NTT Docomo) Hard rubber (Lux) |
| Input device could be … | 10-push-button design Could be lever system Could use abacus-type system Could be push buttons arranged in a line |
| Make the shape … | Square Round Oval |
Edward de Bono developed the lateral thinking techniques of random stimulation and using other people’s views to generate ideas during brainstorming. Lateral thinking provides new ways to come at a problem and get “unstuck.” We will look at two:
Methodology

Pro-Tip: Try this Random Noun Generator
Example – Weed Cutter

The weed cutter will be the forced object. Suppose we randomly choose an automobile wheel as the other element. Some of the ideas that may occur based upon the automobile wheel are:
| A weed cutter that rolls. |  |
| A round weed cutter. | |
| A rubber weed cutter. |  |
| A weed cutter that has spokes. |  |
| A weed cutter that has brakes. |  |
People sometimes stretch their minds by adopting different points of view.
The rain to the wind said,
‘You push and I’ll pelt.’
They so smote the garden bed
That the flowers actually knelt,
And lay lodged–though not dead.
I know how the flowers felt.
 Here are a few more specific actions and attitudes that can be employed to overcome obstacles to creative thinking:
Here are a few more specific actions and attitudes that can be employed to overcome obstacles to creative thinking:
Types of Requirements
Table of Contents
Functional requirements define what functions need to be performed to accomplish the objectives. For example “The Thrust Vector Controller (TVC) shall provide vehicle control about the pitch and yaw axes.” This statement describes a high-level function that the TVC must perform. The technical team needs to transform this statement into a set of design-to functional and performance requirements. [1]
Performance requirements define how well the system needs to perform the functions. Here are the performance requirements associated with the functional requirements example. [2]
• The TVC shall gimbal the engine a maximum of 9 degrees, ± 0.1 degree.
• The TVC shall gimbal the engine at a maximum rate of 5 degrees/second ± 0.3 degrees/second.
• The TVC shall provide a force of 40,000 pounds, ± 500 pounds.
• The TVC shall have a frequency response of 20 Hz, ± 0.1 Hz.
Be careful not to make performance requirements too restrictive. For example, for a system that must be able to run on rechargeable batteries, if the performance requirements specify that the time to recharge should be less than 3 hours when a 12-hour recharge time would be sufficient, potential design solutions are eliminated. In the same sense, if the performance requirements specify that a weight must be within ±0.5 kg, when ±2.5 kg is sufficient, metrology cost will increase without adding value to the product.
Requirements that are implied but not explicitly stated or transformed from higher-level requirement. For example, a requirement for long range or high speed may result in a design requirement for low weight.
Requirements arising from constraints, consideration of issues implied but not explicitly stated in higher-level requirements, factors introduced by the selected architecture, and the design. [3] For example, a requirement for long range or high speed may result in a design requirement for low weight. [4]
A requirement that is established by dividing or otherwise allocating a high-level requirement into multiple lower-level requirements. Example: A 100-pound item that consists of two subsystems might result in weight requirements of 70 pounds and 30 pounds for the two lower-level items. By definition, these are interface requirements and may include mass properties, structural/mechanical, fluid, electrical (power), electronic (signal), software and data, environment (ex. dimensions, center-of-mass, field-of-view, stiffness), electromagnetic effects (electromagnetic compatibility, electromagnetic interference), to name a few. [5]
The “build to,” “code to,” and “buy to” requirements for products and “how to execute” requirements for processes expressed in technical data packages and technical manuals. [6] All applicable standards must be referenced or included in the product specifications.
A specification provides sufficient depth, guidance, and constraints to build/purchase the design.
Technical Requirements are the customer and stakeholder needs that have been translated into a complete set of validated requirements for the system, including all interface requirements. [7]
In this section, I will look at how these requirement types fit within the temporal and hierarchical structure (Figure 1) of a NASA flight project.
Once the customer (e.g., NASA HQ) receives “Mission Authority” (funding), mission objectives and requirements are finalized and given to the implementing organization (e.g., JPL). Along with mission definition, the implementing organization is presented with programmatic constrains, including cost, schedule, and if applicable mission classification.
The implementing organization then translates these mission performance requirements and constants into project/system functional requirements. To these functional requirements, the implementing organization adds institutional constraints, assumption, environmental, and other design requirements and guidelines to a depth sufficient to write project/system performance requirements.
These project/system performance requirements are then further decomposed and allocated among the elements and subsystems. This decomposition and allocation process continues until a complete set of design-to requirements is achieved. At each level of decomposition (system, subsystem, component, etc.), the total set of derived requirements must be validated against the stakeholder expectations or higher level parent requirements before proceeding to the next level of decomposition.
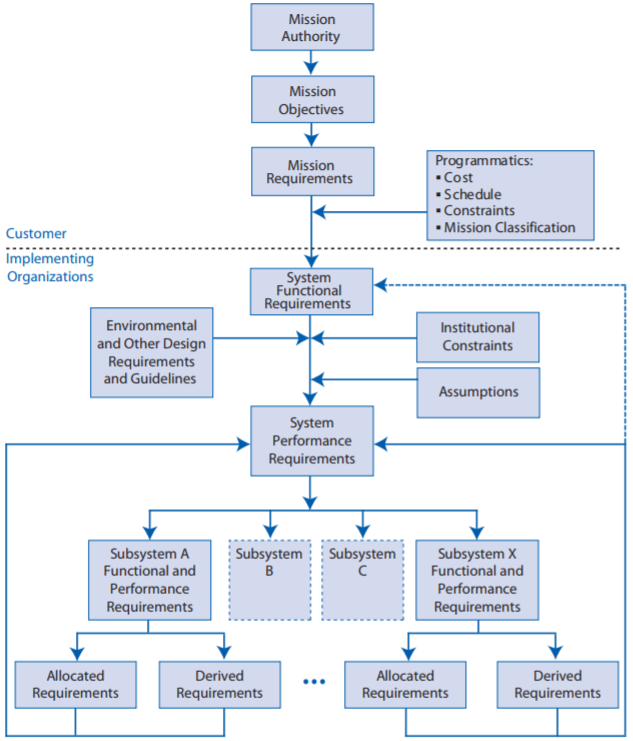
Figure 1. Requirement Flowdown
Table of Contents
Engineering design is a process of devising a system, component, or process to meet desired needs and specifications within constraints. It is an iterative, creative, decision-making process in which the basic sciences, mathematics, and engineering sciences are applied to convert resources into solutions. Engineering design involves identifying opportunities, developing requirements, performing analysis and synthesis, generating multiple solutions, evaluating solutions against requirements, considering risks, and making trade- offs, for the purpose of obtaining a high-quality solution under the given circumstances. For illustrative purposes only, examples of possible constraints include accessibility, aesthetics, codes, constructability, cost, ergonomics, extensibility, functionality, interoperability, legal considerations, maintainability, manufacturability, marketability, policy, regulations, schedule, standards, sustainability, or usability.
– ABET Glossary F’18
A constraint is a condition that must be met. Sometimes a constraint is dictated by external factors such as orbital mechanics (schedule) or the state of technology; sometimes constraints are the result of the overall budget environment. It is important to document the constraints and assumptions along with the mission objectives. [1]
In this definition we see a clear delineation between constraints (cost and schedule) and performance (mission objectives). [3]
Constraints may also take the form of compliance with standards, codes, and technical regulations. These evolve from the concept of interoperability.
Interoperability is a characteristic of a product or system, whose interfaces are completely understood, to work with other products or systems, present or future, in either implementation or access, without any restrictions. [4]
Within the context of the course we will limit the scope of interoperability to its original definition; in other words, information technology and systems engineering applications. A broader definition takes into account social, political, and organizational factors that impact system to system performance.
In the Figure 1 we see the term “interoperability” within the context of “compatibility” and “de facto standard. Historically, interoperability is the codification of a de facto standard by a recognized professional organization, like the IEEE .

Figure 1. Interoperability
With respect to the Open Systems Interconnection model (OSI model) [5], interoperability may be present at each layer. Examples at higher layers include XML and SQL. At lower layers we have ASCII and Unicode. At the hardware (physical) layer we have serial communication protocols like the I2C serial peripheral interface (SPI), universal asynchronous receiver-transmitter (UART); all supported by the 3DoT board.
Standards provide a proven basis for establishing common technical requirements across a program or project to avoid incompatibilities [2] and may in some instances actually lower implementation cost.
This most common example of standards is in weights, measures, and monetary.
Laws that specify minimum standards to protect public safety and health such as codes for construction of buildings. Initially voluntary and consensus standards, later incorporated into codes. Codes which apply to product development and workmanship are included in the product specifications.
A technical regulation is a Government document that defines product characteristics or their related processes and production methods, including the applicable administrative provisions, with which compliance is mandatory. [7]
The difference between standards, codes, and technical regulations lies in compliance. While compliance with standards is voluntary, codes and technical regulations are by nature mandatory.
Standards Organizations
Following is a small representative sample of organizations that establish standards.
Codes and Regulatory Organizations
Here are two examples of organizations that establish codes and regulations.
7) WTO: Non-Tariff Measures, Technical Barriers to Trade, Part 3: Difference between standards and technical regulations
From Constraints to Programmatic Requirements
A critical part of the design process is an early understanding of the overall real-world constraints placed on the program. These constraints may come from the customer “programmatic” or the implementing organization “institutional.” The specific constraints applied to the program are a subset of the constraints, standards, codes, and regulations under which the customer or implementing organization operate. These constraints are typically not able to be changed based on trade off analyses. Once this subset is defined, they become programmatic requirements. Once these constraints are defined requirements can be further defined by establishing performance criteria. The performance is expressed as the quantitative part of the requirement to indicate how well each product function is expected to be accomplished. The rationale should be kept up to date. Often the reason for the requirement is not obvious, and it may be lost if not recorded as the requirement is being documented. The reason may point to a constraint or concept.
This flow-down of customer and institutional constraints into requirements is illustrated in Figure 2.
Figure 2. The flow-down of constraints into requirements
As part of your final report you will need to review and show compliance with constraints on the project imposed by The Robot Company (i.e., CSULB) and Project Stakeholders.
Project/Economic
Subcategories: Cost, Extensibility, Interoperability, Maintainability, Quality, Marketability, and Schedule
All 3DoT robots shall be constrained to a a Cost not to exceed $250.
All project Schedules shall be constrained to a completion date of Tuesday December 18, 2018. Project completion includes documentation and materials purchased by or loaned to the project.
One of the Economic Factors affecting our robots are return rates. To demonstrate the durability and child friendliness of our robot a simple drop test from 1.4 meter shall be performed. The height is defined by the average height of an average 11 year old girl.
Extensibility is designed into the 3DoT board by way of one 8-pin 100 mil connector located on the front of the board and two 8-pin 100 mil connectors located on the top of the board. By plugging shields into these connectors, the 3DoT board can support a diverse set of robots. All robots shall contain one or more custom designed 3DoT shields. The 3DoT shield(s) incorporating interface electronics between the 3DoT board and sensors and/or actuators unique to the robot. Surface Mount Technology (SMT) will be employed unless a waiver for through-hole parts is granted.
Maintainability: Disassemble and Reassemble of the robot shall be constrained to less than 20 minutes (10 + 10 minutes). Disassembly: The 3Dot board is clear of all other electronic and mechanical subassemblies. All electronic and mechanical subassemblies and associated connectors, sensors, and actuators including motors are disconnected. A functional test of the robot is conducted after reassembly to confirm its functionality. All project may reference a cable tree as well as an assembly diagram as necessary. This requirement is demonstrated/verified on the last day of the schedule. Projects may request a waiver with justification.
Social and Ethical
Subcategories: Accessibility, Aesthetics, and Usability
Accessibility by the blind and Marketability of the robots shall be implemented/enhanced by a speaker. The speaker shall generate sound effect consistent with the type of the robot. For example, the Goliath tank would make “track” sounds, the AT-ST sound effects would mimic their Star Wars antecedent.
To enhance Aesthetics, the robot shall be designed in such a way that there are no dangling or exposed wires. Compliance with this requirement, includes the use of keyed and clearly labeled connectors between all electronic and electromechanical components. Do not use jumper wires; ribbon cables are preferred but not required. Loose wires should be contained using spaghetti tubing (not shrink tubing). For 3DoT projects consider using terminal blocks, 100 mil contact pins and headers, 2.0mm PH series JST connectors, and barrel connectors. Handling Precaution for Terminal and Connector will be in compliance with JST documentation.
To enhance Aesthetics, the form factor of a robot modeled on a real or fictitious robot shall be constrained by the original. For example, Goliath should be a scale model of the real Goliath 302 tank. Projects may request a waiver with justification.
Usability of the robots shall be enhanced by adding autonomous functions and/or by use of the Arxterra phone and control panel application as dictated by the assigned mission.
Manufacturability
Subcategories: Constructability, Size, Weight, and Power (SWAP)
Constructability of 3DoT robots shall be documented at the CDR and approved by the president of the TRC robot company. Constraints imposed by this requirement include the use of bushing or bearings in all moving and rotating parts. Interlocking Hinges with latching mechanism. No gaps greater than 1 millimeter, and immediate access to all external connectors (USB, switches).
Manufacturability of 3D printed robots shall be demonstrated by compliance with the 3/3/3 rule. Specifically, total print of a robot is constrained to 9 hours, with no single print taking longer than 3 hours. Projects may request a waiver with justification. This requirement is waived for 3D prints provided by the library’s Innovation Space. In its place, all 3D prints provided by the library’s Innovation Space should minimize the number of files to be printed. Justification should be provided if more than one (1) file is required.
The Size of the electronics enclosure, shall be constrained to be no greater than the 3DoT board, 3DoT shield(s), and associated mounting hardware.
Power to all 3D robots shall be provided by the 3.7V RCR123A battery included with the 3DoT board or use of the external battery 2.0mm PH series JST connector located on the 3DoT board. The RCR123A is a Lithium Polymer LiPo battery. All Safety regulations as defined in Section 4.3 Hazards and Failure Analysis of this document shall apply to the shipping, handling, storage, and disposal of LiPo batteries.
Power to all 3DoT robots shall be provided by the 3.7V 750 mA 2.775Wh Li-Ion battery included with the 3DoT board or use of the external battery 2.0mm PH series JST connector located on the 3DoT board. Compliance will be provided in Section 3.5 Power in the Final Blog Post. Measured current shall have a margin of 5%. Contingency shall be based on measured current, plus margins associated with each line item, minus 750 mA with an assumed depth of discharge of 80% grams (i.e., 600 mA).
Back of the envelope calculations and experiments shall be conducted to set the diameter of Power carrying wires. Follow the American Wire Gauge (AWG) standard when defining the diameter of power-carrying wires. This work to be completed and documented by the CDR.
Environmental Health and Safety (EH&S) Standards
Subcategories: Environmental Standards, Sustainability, Toxic waste (Solar panels), Health and Safety, Ergonomics
All standards, codes, and regulations as defined in the “Engineering Standards and Constraints” Section of this document shall apply.
All Lithium (Li-ion, Li-polymer) batteries shall be purchased with and stored, when not in use, in a fire and explosion proof battery bag.
Robot Interoperabilty
All 3DoT robots shall incorporate the 3DoT v9.05 or later series of boards.
Software shall be written in the Arduino De facto Standard scripting language and/or using the GCC C++ programming language, which is implements the ISO C++ standard (ISO/IEC 14882:1998) published in 1998, and the 2011 and 2014 revisions. Required exceptions to this standard can be found here.
All 3DoT robots shall be in compliance with the 3DoT Command and Telemetry Packet specification.
All 3DoT robots shall be controlled via Bluetooth 4.0 in compliance with the Bluetooth Special Interest Group (SIG) Standard (supersedes IEEE 802.15.1).
Allocated requirements, also known as resource reports, are written and tracked by the System Engineer. The types of resource reports are based on the project. For example, power allocation/estimate for each subsystem module of a spacecraft would be important, while a more loose tracking for a toaster would be in order. Each resource should have a margin attached to it based on the uncertainty in the estimate. It should also show contingency, where contingency is defined as the project allocation minus the estimate plus total margin. Project allocations shall be based on a model (back-of-the-envelope, simulation, prototype, etc.) or other rationality (e.g., similarity to a related product).
Section shows updated useable capacity of the power source selected for the project. Typically represented in a tabulated format, it should include an expected current drawn, measured current drawn, percent uncertainty, and margin for each resource consuming power. Lastly, it should contain total expected current, total margins, project allocation, and contingency clearly showing the power source selected will support the project.
This section is comparable to the previous power allocation section however, dedicated to the updated mass of the project. Also in a tabulated format, it should contain the expected weight, measured weight, percent uncertainty, and margin for each respective resource being used in the project. Lastly, it should contain total expected weight, total margins, project allocation, and contingency.
Any other resources tracked by the system engineer. For example, 3DoT projects using a 3D printer have an 9 hr. (3/3/3) resource requirement that must be tracked.
This section should contain an updated table listing all of items purchased for the project including prototype cost, parts and implementation, PCB manufacturing cost etc. Like all allocated resources (see Mass and Power), this chart should contain the expected cost, actual cost, percent uncertainty, and margin for each item listed in the table. Lastly, it should show the total expected/final cost, total margins, project allocation, and contingency.
This section should contain an updated schedule, generated through programs like ProjectLibre or Microsoft Project, showing the system and subsystem tasks that have been completed or are still in progress. It is important to include the project’s critical path (visually representing the critical path in the schedule diagram is recommended).
This section is an updated version of the Interface Matrix presented at the PDR and CDR. An additional section should discuss the Cable Tree (i.e. wire harness, wiring diagram, etc.) developed in concert with the E&C and MFG showing how the wires, cables, and connectors were integrated into the final product.
If your project has includes and Interface Control Document (ICD), it would go here: top level explanation of MST communication, E&C connections, MFG mating and fastening → to be covered in detail later in the presentation during respective sections.
Once an acceptable design solution has been selected from among the various alternative designs and documented in a technical data package, the design solution must next be verified against the system requirements and constraints.
The verification must show that the design solution definition:
Additional Reading and Resources:
In your final report begin by presenting your strategy for verifying that your design meets design requirements and how you will validate (i.e., the mission plan) that you built the right product for the mission. The next section should present your project’s verification test plan as an overview/summary level. The Verification and Validation Test Plan should be uploaded to BeachBoard and provided in printed form at the day of the mission.
Standards provide a proven basis for establishing common technical requirements across a program or project to avoid incompatibilities and ensure that at least minimum requirements are met. [2]
The most common example of standards is in weights, measures, and monetary.
Standards provide a proven basis for establishing common technical requirements across a program or project to avoid incompatibilities and ensure that at least minimum requirements are met.
Standards in common use, such as weights and measures, can result in lower implementation cost as well as costs for inspection, common supplies, etc. Typically, standards (and specifications) are used throughout the product life cycle to establish design requirements and margins, materials and process specifications, test methods, and interface specifications.
Standards are used as requirements (and guidelines) for design, fabrication, verification, validation, acceptance, operations, and maintenance.
Standards are generated from many sources, leading to confusion, contradiction, and a need for prioritization. Here is one way standards may be prioritized.
Depending on the specific domain or discipline, there may be industry and Center-specific standards that must be followed, particularly when designing hardware. This can be evident in the design of a mechanical part, where a mechanical computer-aided design package selected to model the parts must have the capability to meet specific standards, such as model accuracy, dimensioning and tolerancing, the ability to create different geometries, and the capability to produce annotations describing how to build and inspect the part. However, these same issues must be considered regardless of the product. [3]
To learn more about standards read NASA System Engineering Handbook, Sections 4.2.2.5 Technical Standards and 7.3.4 Design Standards, of which the above is an abridged version.
As part of your final report you will need to review and show compliance with standards, codes, and regulations adopted by The Robot Company (i.e., CSULB) and Project Stakeholders. Specifically include University and applicable environmental, health, and safety standards and those safety standards specifically associated with the product (e.g., Children’s Toys).
CSULB College of Engineering (COE) Safety Resources. Start your search for applicable CSULB COE Safety Standards and Procedures here. Please review and acknowledge if any safety issues as defined by the COE applicable to your project. For example, the closest safety constraint for a linear actuator is for use of the Hydraulic Press located in the Engineering Technology (ET) Building Lab. Here is a link to the Hydraulic Press Safety document.
CSULB Environmental Health & Safety (EH&S)
IEEE National Electrical Safety Code (NESC)
NCEES Fundamental Handbook (FE) Reference Handbook
ASTM F963-17, The Standard Consumer Safety Specification for Toy Safety, is a comprehensive standard addressing numerous hazards that have been identified with toys. In 2008, the Consumer Product Safety Improvement Act of 2008 (CPSIA) mandated that the voluntary toy safety standard in effect at that time become a nationwide mandatory children’s product safety rule.
CSULB Physical Planning & Facilities Management (PPFM) Environmental Compliance Electronic Waste Handling and Disposal Procedures. These procedures shall be followed for the disposal of all batteries.
The National Institute for Occupational Safety and Health (NIOSH) Electrical Safety [1998][page 8] Worker Deaths by Electrocution; A Summary of NIOSH Surveillance and Investigative Findings. Ohio: U.S. Health and Human Services.
| Current Level (Milliamperes) | Probable Effect on Human Body |
| 1 mA | Perception level. Slight tingling sensation. Still dangerous under certain conditions. |
| 5 mA | Slight shock felt; not painful but disturbing. Average individual can let go. However, strong involuntary reactions to shocks in this range may lead to injuries. |
| 6 mA−16 mA | Painful shock, begin to lose muscular control. Commonly referred to as the freezing current or “let-go” range. |
| 17 mA−99 mA | Extreme pain, respiratory arrest, severe muscular contractions. Individual cannot let go. Death is possible. |
| 100 mA−2,000 mA | Ventricular fibrillation (uneven, uncoordinated pumping of the heart.) Muscular contraction and nerve damage begins to occur. Death is likely. |
| > 2,000 mA | Cardiac arrest, internal organ damage, and severe burns. Death is probable. |
Personal email communication dated May 9, 2018, to Gary Hill, Adjunct Professor, COE Department of Electrical Engineering, from Michael R. Kitahara, CSP, ARM-P, CHMM, Environmental Health & Safety, California State University, Long Beach
Other conditions for storing LiIon batteries:
EH&S recommends following industry guidelines by disposing LiIon batteries after their useful life, typically 2-3 years. Storing LiIon batteries on campus after this period would require approval of the campus Risk Manager, Felicia Waynick, cc:ed here
Discuss how constraints, standards, and regulations may have prevented or contributed to the following engineering mistakes.
The Dumbest Mistakes In Space Exploration
10. Russian Polues spacecraft
9. Apollo TV camera – different standards
8. Ariane 5
7. ESA Schiaparelli Lander
6. Russian Venera Spacecraft
5. NASA/JPL Mars Climate Orbiter – different standards
4. NASA Hubble Space Telescope
3. Robert Goddard Pendulum Rocket
2. Russian Proton Rocket
1. Space Shuttle Program – over constrained
Table of Contents
mer’s Expectations (The Problem Statement), including the program objectives, constraints, design drivers, mission profile[1], and criteria for defining mission success.
[1] I will use the term Mission Profile in place of Operational Objectives

From the customer’s expectations high-level requirements are defined.
These high-level requirements drive an iterative design loop where creative “strawman” architecture/designs and derived system and subsystem requirements are developed.
This process will require iterations (inside loops) and design decisions to achieve consistency. Once consistency is achieved, analyses allows the project team to validate the design against the customer’s expectations. A simplified validation asks the questions:
[1] This includes determining if the system is safe and reliable.

Reference: NASA Systems Engineering Handbook Section 4.2 Technical Requirements Definition Start (page 40) and Appendix C page A: 279
| Note: It is extremely important to involve the customer in all phases of a project. Such involvement should be built in as a self-correcting feedback loop that will significantly enhance the chances of mission success. Involving customer in a project builds confidence in the end product and serves as a validation and acceptance with the target audience. |
Understand and translate of customer’s expectations into clear unambiguous quantitative, verifiable, and realizable level 1 program requirements
Complete and thorough requirements traceability (including requirement flow-down and verification that the requirement is at the correct level).
Does the requirement move the design process forward and are any requirements missing (these are the hardest to discover and the most expensive in cost and schedule to correct)?
Document all decisions made during the development of the original design concept[2].
Is language in the form of a requirement?[3]
Avoid multiple requirements within a paragraph[1].
The most exhaustive research project ever done. Unfortunately, in many cases poorly translated to a corrected set of requirements.
The Tesla Final Project Document is here. Does level 1 Project Requirements meet the criteria previously defined? Do level 2 System/Subsystem flow down from the level above.
The Preliminary Pathfinder Project Document is located here. How will these requirements be verified?
Table of Contents
Mission Authority > Start
For EE400D we have consolidate the typical 5 requirement levels: Program, Project, System (included Allocated), Subsystem, and Design, into only two: Program/Project and System/Subsystem. For this course therefore you can differentiate between the two levels by asking yourself the following question. Does the requirement imply a solution, if it does it is at level 2, otherwise it is level 1. One exception is if the customer specifies a design solution as part of their project expectations, in which case it is a level 1 requirement.
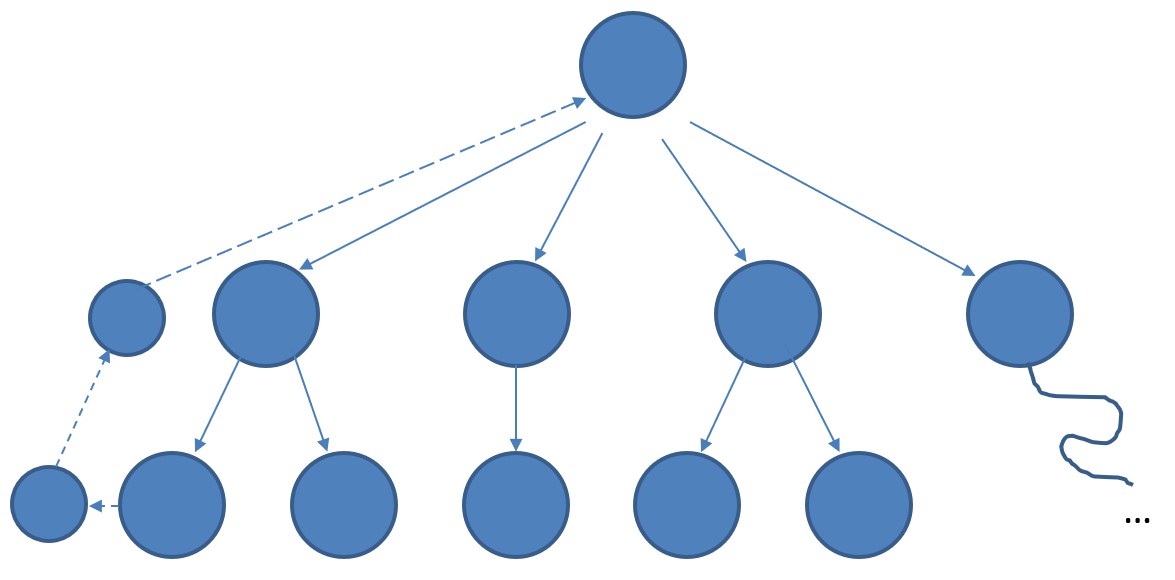
High-level requirements are decomposed into functional and performance requirements and allocated across the system. These are then further decomposed and allocated among the elements and subsystems. This decomposition and allocation process continues until a complete set of design-to requirements is achieved. At each level of decomposition (system, subsystem, component, etc.), the total set of derived requirements must be validated against the stakeholder expectations or higher level parent requirements before proceeding to the next level of decomposition.
The traceability of requirements to the lowest level ensures that each requirement is necessary to meet the stakeholder expectations. Requirements that are not allocated to lower levels or are not implemented at a lower level result in a design that does not meet objectives and is, therefore, not valid (under-design). Conversely, lower level requirements that are not traceable to higher level requirements result in an over-design that is not justified. This hierarchical flow down is illustrated in Figure 1.0.
Figure 1.0 The flowdown of requirements
As illustrated in Figure 1.0 constraints may come from the customer “Programmatic” or the implementing organization “institutional.”
When writing level 2 requirements start with the Harware System Block Diagram[1] and Software Block Diagram. Then come up with requirements needed to design each block. By definition, these are level 2 and are needed to build the system.
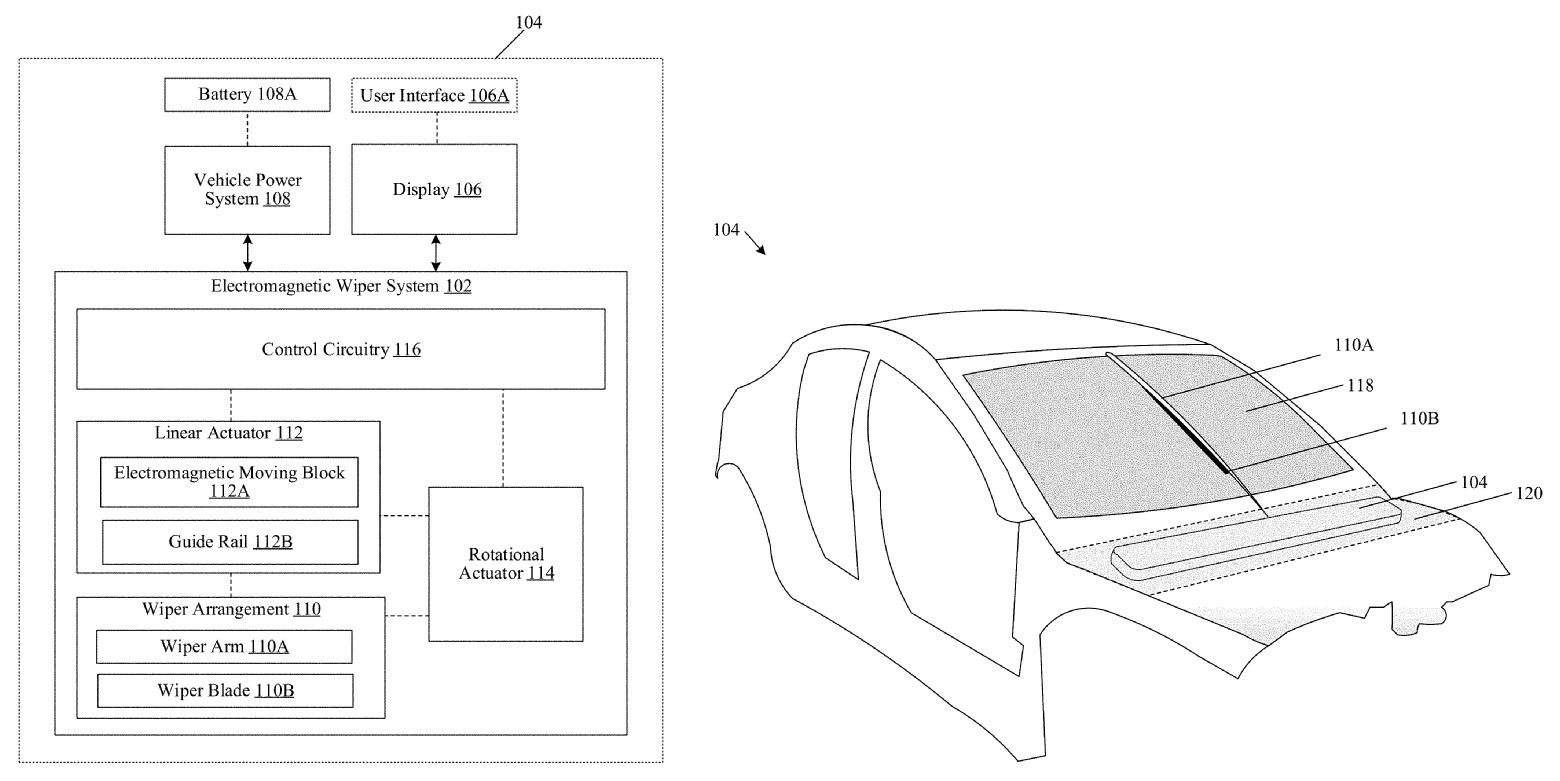
Figure 1. Tesla’s electromagnetic windshield wiper system. (Credit: US Patent Office)
In the “Requirements and Dunker Diagram” lecture, examples of Level 1 Program/Project by Tesla and Pathfinder were highlighted. In the following example we will take a look at Level 2 System/Subsystem Requirements.
Mission Duration is derived from knowing the robot’s actual speed and course layout.
“The Hexapod will be able to match the speed of the rover currently being designed by the 400D Rover team…The speed of the rover will be defined at a later time.” – Project Requirements, October 29, 2013
“To match the speed of the rover, a calculation and verification testing will be performed so that Hexapod will have a walking speed of 8 inches in 1 second.” – Mission Objective, April 22, 2014
“The Hexapod will be designed to operate safely during a demonstration in class and a complete running of the course laid out for the Hexapod at the traffic terrain (see Figure 1).” – Project Requirements, October 29, 2013
“Figure 2. Route of the hexapod and spider bot going to travel.”
– Mission Objective, April 22, 2014
Current is an allocated requirement, which includes a current breakdown by component. How could the TBDs have been filled in? Without knowing mission duration and current requirements, battery sizing becomes problematic – Resource Report October 31, 2013.
“The Hexapod will have power supplied from a portable source, such as a battery, so that it can be controlled remotely and without any other equipment.” – System Requirements, October 29, 2013
“The battery chosen for the build will need to provide power for 18 servos and the control board. It will need to be rechargeable and be within budget. The weight of the battery must not excess 1/5 the weight of the full Hexapod. The battery must have better run time to provide full electricity for at least 20 minute operation. It must also provide enough current for all servos. The suitable range of current is from 2700mA to 3600mA (150mAh to 200mAh per servo). The battery should have a high discharge rate order to deliver the large amount of power at once. For safety requirement, the maximum safe continuous discharge rate must be greater than the maximum current drawn from the servos and electronics boards”
Compare the Battery specification of Hexapod versus battery specification for UFO Abducted.
Are these requirements? To see how it turned out check out their fun video:
Standards provide technical requirements across a program to avoid incompatibilities, lower cost, establish materials and process specifications, test methods, and interface specifications, to name a few. Standards are applied across the projects life-cycle, including design, fabrication, verification, validation, acceptance, operations, and maintenance.
Standards are generated from many sources, leading to confusion, contradiction, and a need for prioritization. Here is one way standards may be prioritized.
As an example, the selection of a computer-aided design CAD package may depend on on its ability to meet specific standards, such as model accuracy, dimensioning and tolerancing, the ability to create different geometries, and the capability to produce annotations describing how to build and inspect the part.
[This section is an abridged version of the NASA System Engineering Handbook, Sections 4.2.2.5 Technical Standards and 7.3.4 Design Standards.]
Table of Contents
Mission Authority > Start
Design evolves through analysis and synthesis.
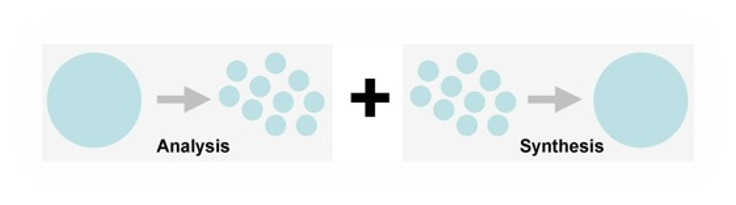
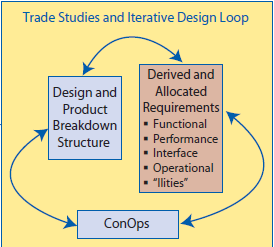





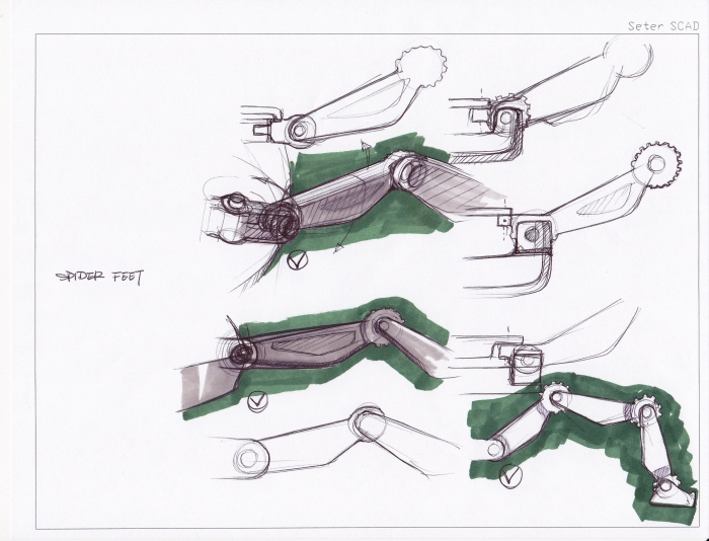
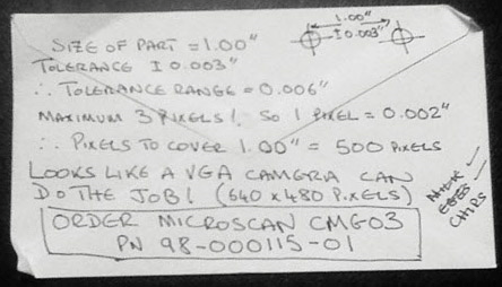






Indirect evaluation can be used as well, to evaluate a design. Scale models can be used to test aircraft design at a fraction of the cost of building a prototype.

Preliminary Design Review (PDR)
The purpose of the Preliminary Design Review (PDR) is to formalize all of the information regarding your project into something that anyone without prior knowledge would be able to understand what was being attempted. It will also help clear up any issues or misunderstandings between the customer and the team. This blog post provides information about what documentation is required and some examples of how to create them.
The PDR can be considered to be made up of two main sections, the project documentation and the project plan / schedule. The project documentation focuses on details about what the team will be designing and involves things such as the requirements, system block diagram, and software block diagram. The project plan / schedule outlines how the team plans to complete the project within the semester. You will be required to complete and present both for the PDR presentation.
Table of Contents
The objective of the Preliminary Design Documentation is to lay out the preliminary “technical” design of the project as defined by the Level 1 and 2 requirements, system design, and modeling. While the preliminary design needs to provide a clear description of the project, it is understood that the creation process follows the System Engineering Method and is therefore iterative by nature. You can consider this being a snapshot of the design process for future students to learn from if they continue working on the next generation of the robot.
This section of the presentation / document should contain the following:
The process begins with the identification of the problem to be solved, and/or product to be built as defined by the customer and codified by the Program Objective Statement. Although the Program Objective may be in the form of a requirement, it is typically a qualitative statement of what the customer wants. These “objectives” are not developed in isolation or at a fixed point in time but like all elements of the engineering method, evolve over the life of the project.
For example, after a system design is selected and the manufacturing element of the project comes to the fore, you may need to ask the customer about how easily the widget needs to be put together or taken apart for repair. The answer may require a redrafting of the program objectives, program requirements, system/subsystem requirements, and associated verification tests.
The Mission Profile documents how the product will be operated by the customer and is focused on the conceptual operation (ConOps). For many of our robots, the Mission Profile is defined by the course it will run on the day of the Final. This can also lead to additional requirements being generated as you find issues that were not considered.
Present Constraints on the project imposed by The Robot Company and Project Stakeholders as defined in the “Program Constraints” section of the “Realistic Constraints and Engineering Standards” lecture. Catagories include: Project/Economic, Social and Ethical, Manufacturability, Environmental Health and Safety (EH&S) Standards, and Functional. Adapt material under these categories as applicable to your project.
For example, any 3DoT project will have to follow these “Functional” constraints. You may have a requirement that is similar, so change it to use the wording shown here.
All 3DoT robots shall incorporate the 3DoT v8 or later series of boards.
Software shall be written in the Arduino De facto Standard scripting language and/or using the GCC C++ programming language, which is implements the ISO C++ standard (ISO/IEC 14882:1998) published in 1998, and the 2011 and 2014 revisions. Required exceptions to this standard can be found here.
All 3DoT robots shall be in compliance with the 3DoT Command and Telemetry Packet specification.
All 3DoT robots shall be controlled via Bluetooth 4.0 in compliance with the Bluetooth Special Interest Group (SIG) Standard (supersedes IEEE 802.15.1).
Start by reviewing the following material.
From the mission objectives statement, Program and Project Requirements are written. Often the simple (only by appearance) process of defining a program requirement, will require rethinking program objectives and introduce new calculations that need to be performed, trade-off studies to be conducted, new models / prototypes that will need to be built, and experiments to be conducted. In other words each step in the engineering design process sends ripples both up and down the project.
You should indicate your initial thoughts on how to verify the requirement. This will help identify if you have worded the requirement properly.
Here is an example from the Tesla Coil PDR.
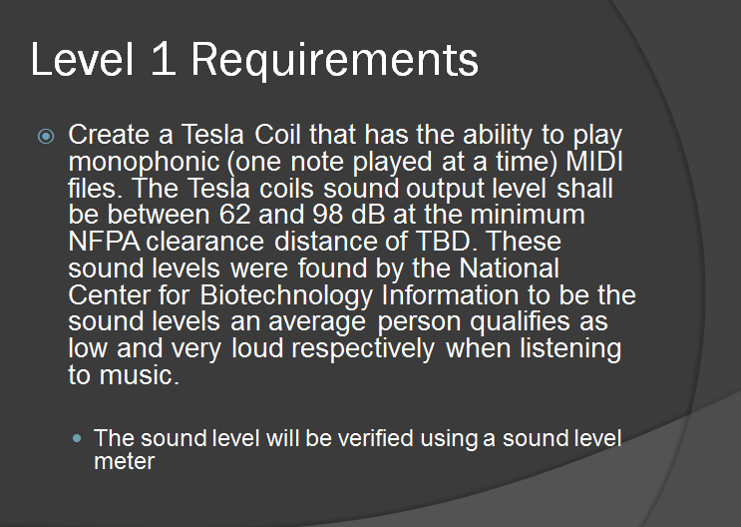
Once a system design is selected, the subsystems are defined. Definition of the subsystems is in the form of Subsystem Requirements and Design Specifications (Level 2 requirements).
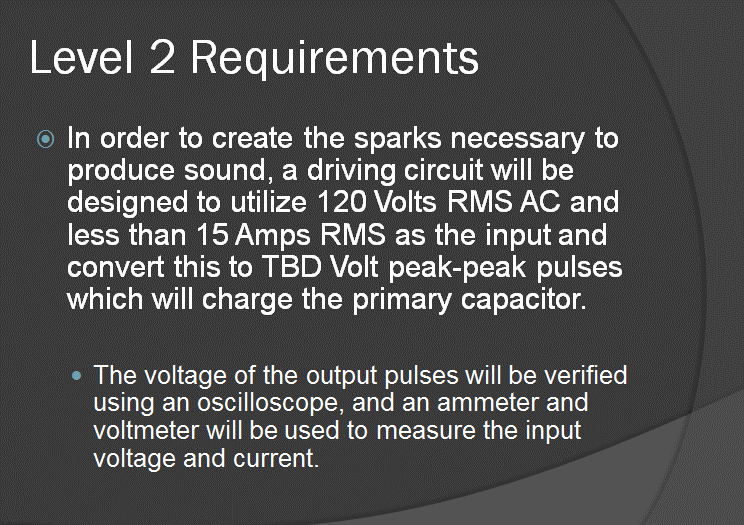
Like the layers of requirements preceding them, each requirement level (program, project, system, subsystem), must be responsive to higher level requirement(s). They may never stand alone. To clarify, Level 2 requirements respond to Level 1 and Level 1 requirements respond to the project objectives / mission profile.
A single level 1 requirement will typically spawn multiple level 2 requirements; just as level 2 requirements can be traced to multiple level 1 requirements. In other words, there is not a 1:1 correspondence.
Once a first draft of the program/project requirements is done, the project team searches for creative design solutions (design ideas) for potential problems or issues that need to be addressed. This is where the creativity methods discussed in class can help.
This section is not required for problems or issues where the solution is dictated by the project objectives or mission profile. If the design solution has never been done by previous semesters, then this is needed in your presentation.
Another aspect of the system design is the clear definition of the subsystems and the interfaces that exist between them. From an electrical engineering perspective, this definition is predicated by the System Block Diagram, followed by a description of the subsystems, their interfaces and requirements.
This diagram should clearly define all of the subsystems that make up your project and show how they interact. One additional detail that would be helpful is to show how the subsystems fit together. For example, many subsystems will physically be within the chassis of your robot. It would be useful to represent that and show the interconnections on the inside.
Do not overload the diagram with long paragraphs describing each subsystems function. Be prepared to explain this verbally during the presentation.
Example System Block Diagram from Tesla Roadster
The key thing here is to break down your project into its major parts and show how they are related. If it can be broken down further, make sure to present it in a way that makes sense.
When two or more projects are subsystems of a larger project, they will need to coordinate how those subsystems interact. That results in the interface control document (ICD), which explains how the different interfaces of each project should be defined to keep everything organized.
The major subsystems comprising the system are defined in the Product Breakdown Structure (PBS). The WBS will be covered in the Project Plan / Schedule section of this post.
The important thing about this section is that a specific person is clearly associated with a product deliverable. It is based on the system block diagram and WBS. Everything shown in the PBS should be representative of the details from those documents. An example is shown below.
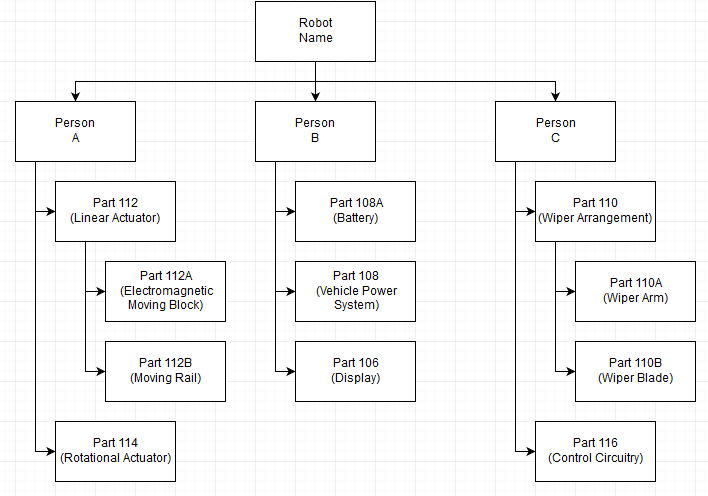
This section includes any material that helps portray how the software will need to work. It can consist of program flowcharts, block diagrams, or any other visual aid to show how the final code will perform.
If your project needs to incorporate the Arxterra Control Panel or ArxRobot app in any way, you will need to show how it will be used and/or customized.
It also shows custom MCU Firmware that needs to be generated. As things are being planned out, you may use placeholder names for the functions needed as long as it is relevant (does not need an explanation for what the purpose is).
You should make use of the universal modeling language (UML) for these diagrams. This is shown below with examples taken from Pathfinder Generation #7’s PDR.
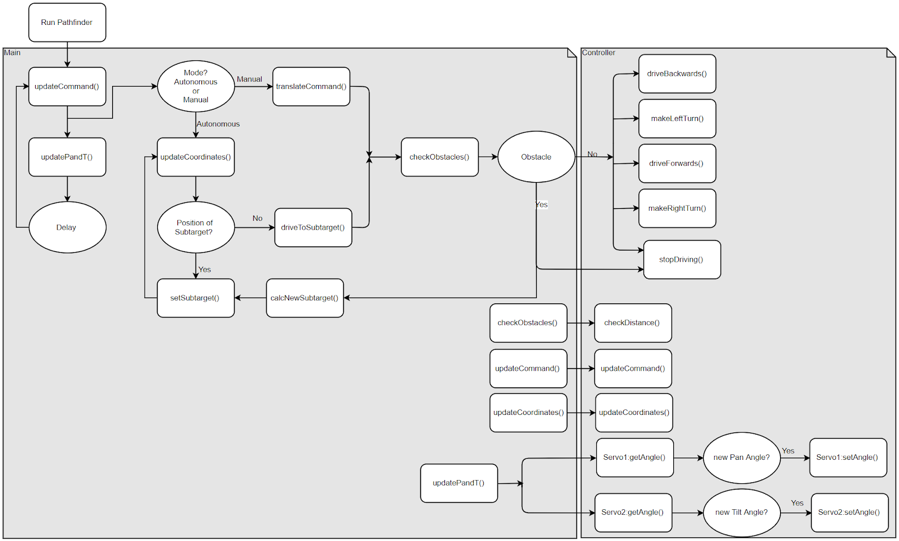
Program Flow during operation
The first diagram is showing how the functions will interact with each other and at what point in the program they will be called from. It helps show how the structure will be implemented.
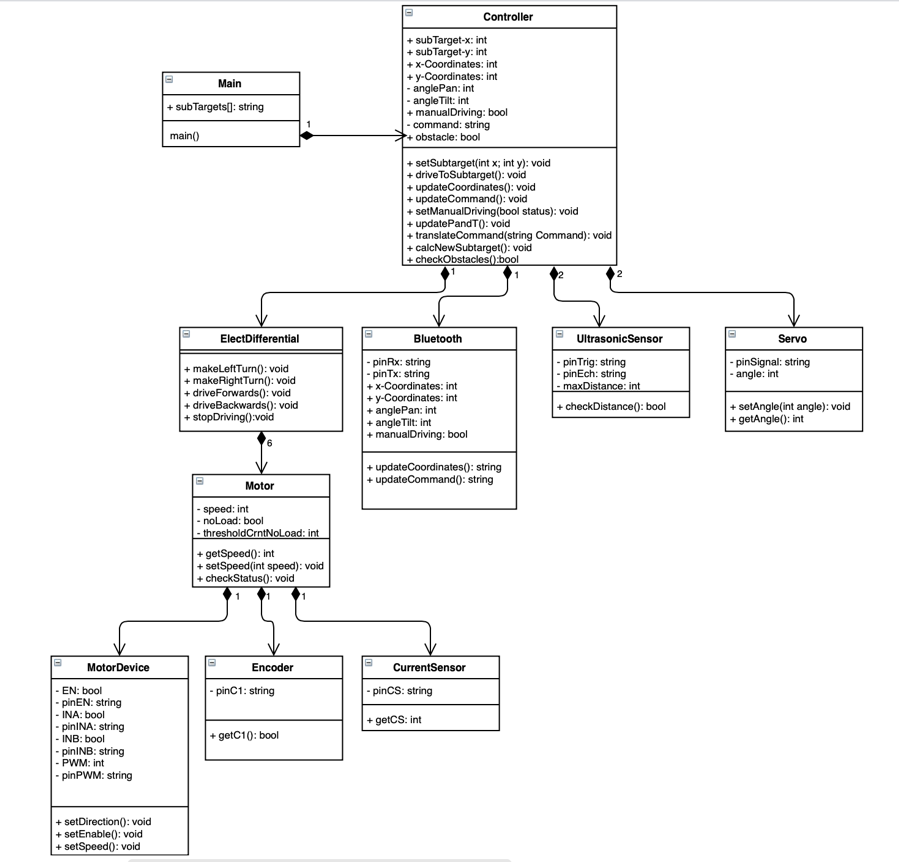
Function and Variable Descriptions
The second diagram is showing additional details about each function and the variables involved with each.
For a microcontroller based design, the electronic interface definition begins with the Interface Matrix and is finally documented by detailed schematic(s). At this point, there should be a clear picture of what will be going onto the custom PCB shield that will be designed.
As an option your project may provide an interface matrix for each microcontroller or printed circuit board (PCB) to indicate the different wires and their function on that board. Shown below is an example of how this should be done. While it may be tedious, you should indicate all available pins for the device and indicate when that resource has been taken.
| Pin | Name | Sensor Shield |
| 1 | SCL | NC |
| 2 | SDA | NC |
| 3 | 3.3V | 3.3V |
| 4 | GND | GND |
| 5 | AO | IR_R_O |
| 6 | A1 | IR_R_I |
| 7 | A2 | IR_L_I |
| 8 | A3 | IR_L_O |
For the PDR it is sufficient to document the electronic design using a Fritzing diagram and/or photograph of the breadboarding done. This should lead to the custom PCB shield schematic created in EagleCAD, which may also be shown in the presentation (i.e., optional).
You can find additional information on how to make the Fritzing diagram here.
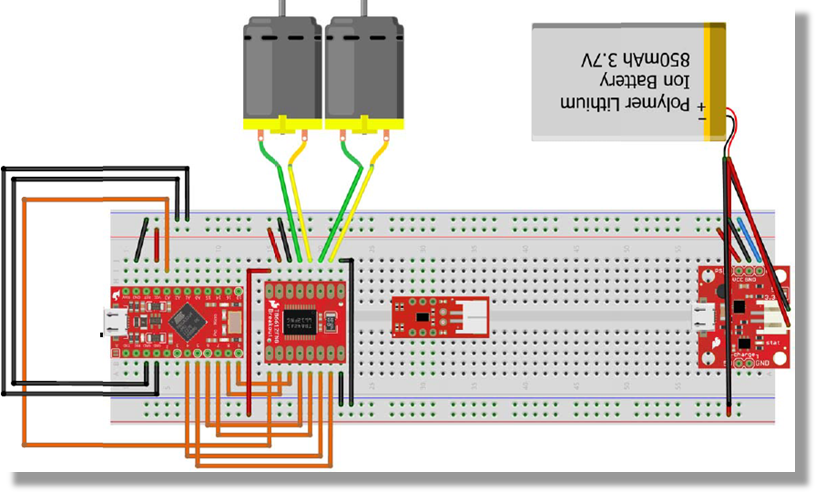
From a mechanical engineering perspective, the system design is predicated by a 3D mechanical rendering of the system with sub-assemblies clearly identified. This is typically done with an annotated exploded view of the system, followed by a description of the subsystems, their interfaces and requirements. Ideally, the best representation of the system will be from SolidWorks models but the complexity of the project may make it difficult. If you feel the model is lacking, include additional material only if they add to the presentation.
Do not show pictures of hand drawn sketches or Microsoft Paint drawings.
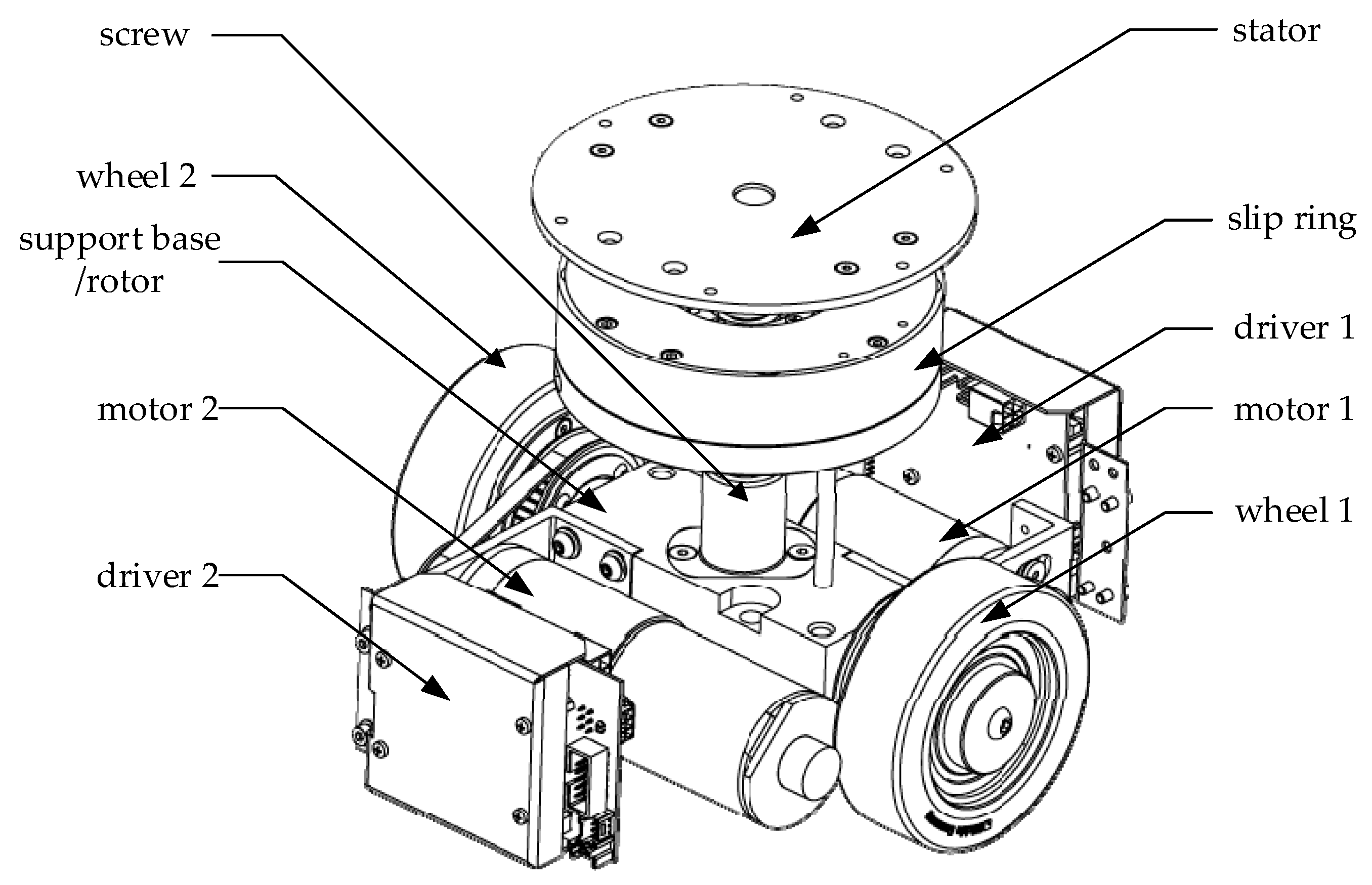
Source: A Master-Slave Separate Parallel Intelligent Mobile Robot Used for Autonomous Pallet Transportation
The WBS is a hierarchical breakdown of the work necessary to complete the project. (NASA System Engineering Handbook Section 4.3.2.1 Product Breakdown Structure).
Your WBS should be taken to a level such that tasks within each structural element are assigned to a single engineer. Specifically, organize all your tasks into groups in some hierarchical tree structure where each node (group) is the responsibility of only one engineer. Normally, the hierarchy will fall along Division/Section/Group lines.
 Loading...
Loading...
Given that we are not following the matrix organization this semester, the WBS should be structured according to the project members and the work that they are responsible for. IE Person A is responsible for Task 1 (designing 3D model), Task 2 (Printing and assembling robot), etc. You can find more information about the WBS from the class lecture.
After a first pass through the Engineering Process, you should have a fairly complete set of Task Definitions. These definitions include a short description of each task that needs to be performed and its duration. Once these tasks are defined, the projects take them to the divisions where engineers are assigned to complete them across the division (see Work Breakdown Structure). For example, if multiple projects need to know more about the characteristics of a servo, then only one engineer needs be assigned to gather information, define a test plan, and then conduct and document the test results.
Each member should develop the list of tasks that they will be focusing on in the coming weeks. A brief explanation of how they plan to approach it should be provided. For example, the E&C engineer is responsible for the custom PCB design and they may plan to breadboard the individual components that will go on the PCB to confirm how the wiring should be done before developing the schematic. It may take two weeks or more for breadboard testing, evaluations of the design, and revisions before being complete.
These tasks can include applicable sketches, back of the envelope, trade-off studies, models, etc.
Trade off studies must begin and end with requirements that are the key factors in making a choice. Trade-off studies must be quantitative.
Avoid words like: Typically small, Large Torque, Very accurate and precise, Highly efficient, Has reserve power and torque, more likely to malfunction if subjected to overload, precise positioning, stable, quick starting and stopping, small step distance, it’s possible to “skip” steps with high loads, draws maximum current constantly, low self-discharge, very high energy density, A little expensive, high shelf life. Provide exact values if possible from datasheets or calculations to allow for accurate comparisons.
The main focus of this section is to lay out what are the critical things each team member will be working on and how they may plan to do them.
Once that is covered, you should present the results from any experiments that you have performed. For example, any breadboarding or back of the envelope calculations that were performed should be discussed here.
Do not simply copy-paste material from previous generations of documents. Give proper credit for any work that you not responsible for.
For the project schedule, create a timeline of the tasks that will need to be completed based on what was covered from the “Design and Unique Task Descriptions”. This can be done in Microsoft Excel or Google Spreadsheet and should indicate the description (from the previous section) and duration of each task. Make sure to also include the major milestones such as the V2 Demo, CDR (November 5th for both) and the final (December 12th). Limit to aproximatly twenty (20) tasks.
The following figure shows a simple seven (7) task “waterfall” schedule. Each task is represented by a blue box. Dependency between tasks is shown by a blue arrow. The two milestones described in the previous paragraph are also shown. The critical path is shown in green. While the completion times of blocks not on the critical path can slip (illustrated by dotted green lines), any slips in tasks on the critical path will result in the project not meeting one or more of the project milestones.
Simple Waterfall Diagram
(OPTIONAL)
The top level schedule provided in this section should be developed using Microsoft Project or Project Libre. The top level schedule should be built from (linked to) WBS modules. Each module should in turn be linked to system/subsystem level tasks. These tasks may include trade-off studies and modeling (including rapid prototyping) as described in the next section and defined in the Preliminary Design Document. This is because it will help show how the tasks are dependent on each other and keep track of progress being made. Ideally, you will be able to get to this point a bit later in the semester.
From Microsoft Project, create a table of tasks needed to implement the project at the System and Subsystem level as defined by your WBS. A time estimate with uncertainty should be attached to each task. These tasks should be in response to those tasks defined in the Preliminary Design Document.
If you have any other project management software that can generate this, feel free to use that as an alternative to Microsoft Project or Project Libre.
The purpose of the burndown diagram is to show the projects progress up to this point. Depending on how the project schedule is defined, it should give an estimation of how work should be progressing.
The percent of project completion is computed as follows. When a task is started, 50% of its weight is assigned as completed. When a task is completed, the remaining 50% is added to the score. Task completion must be approved by the president or the vice president. Proof of completion (blog post, documentation, etc) needs to be provided for each task before it can be considered finished. There are two approaches to how to define the burndown diagram.
Each task can be evaluated based on percentage completion or the number of hours it would take to finish.
For the first method, the total number of tasks needs to be considered. As each task is completed, you compare it to that total. I.E. 5 tasks are completed with another 4 that have started. That would correspond to 7 tasks (1 for each task done and 0.5 for each started) out of a total of 30. Therefore the total percentage done would be 23.33%.
For the second method, the total number of hours needs to be considered. As each task is completed, you compare it to that total. I.E. each task may vary for the number of hours needed. Assume the average is 4 hours for each task. For 5 tasks completed and 4 that have started, it would correspond to a total of 28 hours (4 for each completed task and 2 for each started task). If the total for the project is 84 hours, the total percentage would be 33.33%.
Resource Reports (i.e., resource allocations), as they are applicable to the project, show how shared resources are allocated among the different subsystems. For example, power allocation/estimate for each subsystem module help to evaluate the total needed for the battery. Each resource should have a margin attached to it based on the uncertainty in the estimate. It should also show contingency, where contingency is defined as the project allocation minus the estimate and total margin.
One important consideration for these resource reports is that the project allocation for that resource needs to be justified or derived from a requirement. Often, this is arbitrary due to the characeristics of a student project. However, to be realistic, there is some form of a constraint that limits what is allowed. Therefore, the project allocation for each resource needs to be clearly defined as it shows how the design may run into problems with the choice of components and leads to the specifications of what is needed (operating voltage, etc).
For example, most projects will need a power resource report. This report would factor in the available power, typically the current rating of the RCR123A battery selected, and the operating time, typically a function of the mission profile.
This section is dedicated to the total mass of the project. Also in a tabulated format, it should contain the expected weight, measured weight, percent uncertainty, and margin for each respective resource being used in the project. Lastly, it should contain total expected weight, total margins, project allocation, and contingency.
This section shows the different power demands of the various components used. There are several ways to represent the power (watts, mA, or mAh), so make sure to pick one. Typically represented in a tabulated format, it should include an expected current drawn, measured current drawn, percent uncertainty, and margin for each resource consuming power (for the mA case). Lastly, it should contain total expected current, total margins, project allocation, and contingency clearly showing the power source selected will support the project.
Any other resources tracked by the system engineer. For example, projects using the libraries 3D printer, should show how cost is minimized, based on library’s pricing algorithm.
A unique resource report for the Card Shuffler project would be related to their Mission Profile. For example, a time resource report is needed to indicate how much time each part of the process should take in order to shuffle and identify if any cards are missing.
Within the introduction of this section, please indicate the funding source for this project.
This is a table containing a parts list of all items to be purchased in support of the project. Each line item should include a margin if the actual item to purchase has not been defined. It is important that the estimate be as comprehensive as possible. Please do not leave off the list items for which you are know you will need but currently have not identified a model number/source. For example if you know you are going to need a servo but am not sure about which one then research the cost of servos and use the mean cost as an estimate with an uncertainty that makes sense. Finally, at the end of the table add a margin. This is to cover any contingencies including broken parts, parts you forgot about, etc. This margin should decrease with time as the project becomes better defined. If there are any parts that you will be borrowing from the cabinets or previous generations, please indicate those as well on this list and consider their actual cost to be 0. Add a note that it is being provided from previous semesters.
The PDR presentation will be graded, consistent with the outline of this document. Sections and material designated as “optional” and “as applicable” are not required.
Focus On
Your final CDR grade will be a weighted average of the following elements.
For additional tips on your CDR review, I would recommend reviewing the PDR PowerPoint presentation.
This template is saved under “Final Blog Post Template”
Your Project Name Here Generation Number Summary Blog Post
Author/s:
Verification:
Approval:
Table of Contents
Imagine hearing the rotors of a helicopter. Shortly thereafter, the CEO of the company steps into the conference room apologizing for being late; he/she steps to the podium and tells everyone how important the project is to the future of the company. Unfortunately, the CEO has to fly off to another meeting. He/She will read about your project on the helicopter as it flies to the airport. That means you have just a few moments to convince him/her not to cancel your project. Shortly thereafter, you hear the rotors of the helicopter spin-up and he/she is gone. Write your executive summary with this scenario in mind.
Program Objectives
The Robot Company (TRC) will be debuting its 2019 line-up of toy robots and associated games at the Toy-Invasion 2019 convention in Burbank CA on January 6, 2019. Your team’s assignment is to make the 3D printed and/or laser-cut prototypes to be showcased at the convention, prior to production starting in the second quarter of 2019. The robots will feature our new ArxRobot smart phone application and the Arxterra internet applications allowing children to interact and play games around the world. In addition, the robots should be able operate autonomously in game mode. See game(s) (i.e, mission objectives) assigned to your robot by the Game Division. To decrease electronics cost, interoperability between all TRC robots will be maintained by incorporation of the 3DoT board, developed by our Electronics R&D Section. Modification of downloadable content is limited to software switch setting and robot unique graphics of the smart phone and Arxterra applications. Modifications of electronics is limited to custom 3DoT shields as required by the unique project objectives of your robot. The Marketing Division has set our target demographic as children between the ages of 7 and 13, with a median (target) age of 11. To decrease production costs, please keep robots as small as possible, consistent with our other objectives. As with all our products, all safety, environmental, and other applicable standards shall be met. Remember, all children, including the disabled are our most important stakeholders. Our Manufacturing Division has also asked me to remind you that Manufacturability and Repairability best practices must be followed.
Project Objectives
Hexapod Fall 2013 Example Text.
The TRC Hexapod project will offer an opportunity to study the limitations of a robot over a realistic terrain. A hexapod robot offers increased maneuverability and improved stability over traditional rovers. Its low center of gravity allows the robot to move over terrain that might limit a tracked or wheeled rover. Its six legged jointed design will allow the robot to change height permitting it to overcome taller obstacles that would otherwise obstruct its path. Its integration with an Android phone and open-sourced control boards allows for future builders to easily recreate or improve on the Hexapod design.
Provide a short summary of the Mission Objectives with a link to the formal definition of the mission.
This section should include at least one annotated figure. The figure may be an annotated System Block Diagram, Photo, Illustration, or exploded 3D Model showing the major subsystems/components/features of the design. Text should talk to this figure(s). This is the last section the CEO will be reading.
References:
 tab, scroll down to Requirements.
tab, scroll down to Requirements.After reviewing the above material, write your introduction here.
Review and show compliance with constraints on the project imposed by The Robot Company (i.e., CSULB) and Project Stakeholders. Specifically include University and applicable environmental, health, and safety standards and those safety standards specifically associated with the product (e.g., Children’s Toys).
Add material from the “Applicable Engineering Standards” section of the “Add material from the “Program Constraints” section of the “The System Engineering Method” lecture as applicable to your project here.” lecture as applicable to your project here.
Add material from the “Environmental, Health, and Safety (EH&S) Standards” section of the “Add material from the “Program Constraints” section of the “The System Engineering Method” lecture as applicable to your project here.” lecture as applicable to your project here.
After establishing which requirements apply to your robot provide a consistent numbering system (for example L1-1, L1-2, …) allowing traceability to dependent Level 2 requirements. Please review the Requirements lecture material to learn more about Requirements Traceability.
Add material from the “Program Constraints” section of the “The System Engineering Method” lecture as applicable to your project here.
Provide a short summary of the Project unique Level 1 Functional Requirements.
References:
tab, scroll down to Defining Level 2 Requirements.Provide a short summary of Derived Design dependent Level 2 Requirements. These level 2 requirements must provide links to the original level 1 design independent requirement(s) upon which they are “derived.”
Recommended subsections include: Mission, Systems, Electronics, Software (includes Firmware), Mechanical/Manufacturing, and Safety and Quality Assurance.
As you document your level 2 requirements, apply a consistent numbering system (for example L2-1, L2-2, …). Show traceability to the Level 1 requirement(s) from which they are derived.
Subsystem “A” derived design requirements.
Additional subsystem derived design requirements.
Allocated requirements, also known as resource reports, are written and tracked by the System Engineer. The types of resource reports are based on the project. For example, power allocation/estimate for each subsystem module of a spacecraft would be important, while a more loose tracking for a toaster would be in order. Each resource should have a margin attached to it based on the uncertainty in the estimate. It should also show contingency, where contingency is defined as the project allocation minus the estimate plus total margin.
This section is comparable to the previous power allocation section however, dedicated to the updated mass of the project. Also in a tabulated format, it should contain the expected weight, measured weight, percent uncertainty, and margin for each respective resource being used in the project. Lastly, it should contain total expected weight, total margins, project allocation, and contingency.
Section shows updated useable capacity of the power source selected for the project. Typically represented in a tabulated format, it should include an expected current drawn, measured current drawn, percent uncertainty, and margin for each resource consuming power. Lastly, it should contain total expected current, total margins, project allocation, and contingency clearly showing the power source selected will support the project.
Any other resources tracked by the system engineer. For example, 3DoT projects using a 3D printer have an 9 hr. (3/3/3) resource requirement that must be tracked.
Introduction to the section.
Project Work Breakdown Structure (WBS) and Product Breakdown Structure (PBS).
References:
tab, scroll down to The Robot Company Work Breakdown Schedule.This section should contain an updated table listing all of items purchased for the project including prototype cost, parts and implementation, PCB manufacturing cost etc. Like all allocated resources (see Mass and Power), this chart should contain the expected cost, actual cost, percent uncertainty, and margin for each item listed in the table. Lastly, it should show the total expected/final cost, total margins, project allocation, and contingency.
This section should contain an updated schedule, generated through programs like ProjectLibre or Microsoft Project, showing the system and subsystem tasks that have been completed or are still in progress. It is important to include the project’s critical path (visually representing the critical path in the schedule diagram is recommended).
Summarize schedule status including percentage complete and if available a burn down diagram.
Introduction to the section.
Provide theoretical background, concepts involved in the design process and a summary of the key literature and online resources (e.g. Arxterra – Project Summary Post) that has been researched and used in the design effort. A summary of similar previous designs can also be discussed to show strength and weakness of your design compared to others.
Creative solutions introduced with this generation.
Provide details of the proposed solution that meets the project specifications while best satisfying the applicable constraints. Provide block diagram representation of the proposed system, discuss each subsystem in detail and provide any preliminary results including simulation or analytical results to support your hypothesis. Also provide an initial budget estimate and timeline for the completion of the project.
Present and discuss the final design along with any modifications made to the conceptual / preliminary design.
Subsequent sections should cover….
Discuss the major subsystems in the design and the purpose and features of each subsystem. Provide schematic drawings, simulation results and experimental results if any and discuss the comparison between the two. Demonstrate that the designed project meets all requirements. Provide sufficient details of the design for reproducible. Discuss the operation of the project in terms of safety and fail-safe mechanisms that are incorporated in the design.
Detailed System Block Diagram(s) of the design. This is an updated and more detailed version of the block diagram presented as part of the conceptual design. Identify connectors, numbers of wires in a bus, and when practical, the names of the wires and busses. As part of your write-up, walk the reader through each subsystem/component block and how they are interconnected (i.e., subsystem and interface descriptions).
Detailed System Block Diagram(s) of the design. This is an updated and more detailed version of the block diagram presented as part of the conceptual design. Identify connectors, numbers of wires in a bus, and when practical, the names of the wires and buses. As part of your write-up, walk the reader through each subsystem/component block and how they are interconnected (i.e., subsystem and interface descriptions).
This section is an updated version of the Interface Matrix presented at the PDR and CDR. An additional section should discuss the Cable Tree (i.e. wire harness, wiring diagram, etc.) developed in concert with the E&C and MFG showing how the wires, cables, and connectors were integrated into the final product.
If your project has includes and Interface Control Document (ICD), it would go here: top level explanation of MST communication, E&C connections, MFG mating and fastening → to be covered in detail later in the presentation during respective sections.
References:
tab, scroll down to Design Process and Modeling.Section includes is a table showing the title of all modeling originally planned and completed. Completed tasks should provide name and link to associated posts.
Following sections should showcase a few modeling tasks. Refer to Model Grading Scale to help you to determine which modeling tasks to highlight. Show what you did to arrive at a design solution to a system, subsystem, and/or component design problem. Did experimental results and observations meet Design Requirements? For example; show how you went from requirements, to a trade-off study, to a simulation and then to a set of experiments in order to select a component.
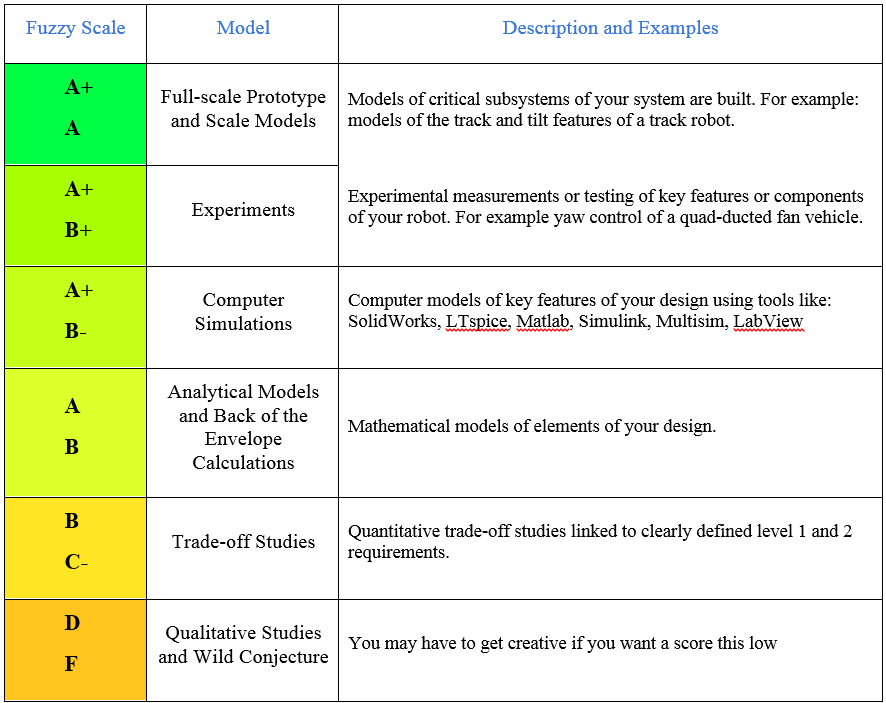
Figure 2. Fuzzy Model Grading Scale
3DoT Robots
This section provides a systems level look at the software modules employed by 3DoT robots. This section represents a collaborative effort by the system and electronics/control engineers.
| Hardware | Software |
| Personal Computer | Arxterra Control Panel |
| Smartphone | ArxRobot App |
| 3DoT Board | Arduino and Robot3DoT Library |
This section should provide a general block diagram of the software system, followed by the Arduino software modules responsible for communicating with the Arxterra App, specifically Command and Telemetry decoding and encoding.
While this sections covers use and customization of the Arxterra Control Panel and ArxRobot App in detail, it only the defines custom 3DoT call-back handlers. The actual firmware code is in the electronics section.
Non-3DoT Projects: Highlight commands being implemented by the user at a top level. Provide any feedback systems that are user-facing. This could be through notification LEDs, haptic feedback, etc. at the system level (E&C will expand on the details during the respective section to follow).
User Input (Command) → [black box] → Notifications (Telemetry)
This section of the presentation should bring attention to the Electronic Components and serve as an introduction to this field. You should present some details about the custom parts in your design as well as the ICs you chose and why you chose them. As an example you should provide information which IMU you used or which type of rotary encoder you used (where applicable). This should lead into the firmware portion of the presentation.
This is section shows the progression of the design from Fritzing diagram (optional), to physical breadboard photo, to PCB schematic, PCB layout, and finally a photo of the completed board; preferable integrated with the product itself.
You want to review the PCB Design fuzzy grading scale. and show this during the mission demonstration.
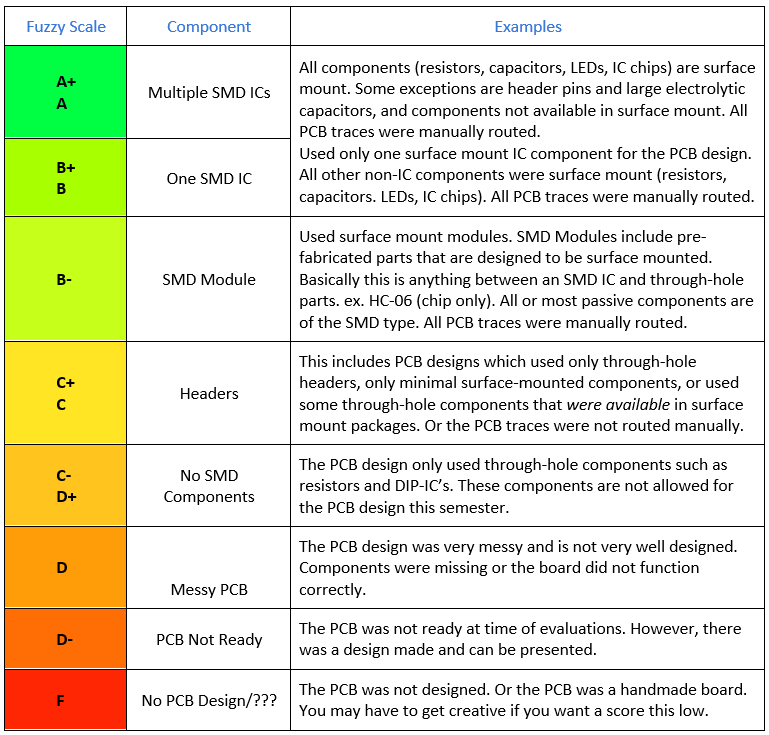
Figure 3. PCB Fuzzy Grading Scale
Describe and document the code implementing the firmware modules defined in the “Mission Software” section. Specifically, how the code controls and provides feedback (telemetry) for the sensors and actuators defined in the introduction to the “Electronics” section.
Provide Pseudo-code and/or flowcharts as well as short C++ samples to help illustrate the firmware. You should go into detail about any key aspects (such as shifting the center of gravity, running two motors 180 degrees out of phase, or reading of EMG sensors) of the design.
All Arduino and C++ code samples must include descriptive comments.
This section includes all SolidWorks generated 3D Models of the design. Annotation is recommended. If available the Manufacturing Engineer include photos of the Prototype/Production Parts.
Reading and Resources:
Present your strategy for verifying that your design meets design requirements and how you will validate (i.e., the mission plan) that you built the right product for the mission. The next section should present your project’s verification test plan as an overview/summary level. The Verification and Validation Test Plan should be uploaded to BeachBoard and provided in printed form at the day of the mission.
This section includes your thoughts on how the next generation product could be improved, lessons learned the hard way or how would you do things different if you could go back in time.
These are the starting resource files for the next generation of robots. All documentation shall be uploaded, linked to, and archived in to the Arxterra Google Drive. The “Resource” section includes links to the following material.


{kind=link}
{kind=link}