{kind=link}
Encoder Trade-Off Study
By: Matt Shellhammer (Electronics & Control Engineer)
With collaboration by: Zach Oyog (Electronics & Control Engineer of Sojourner)
Approved by: Lucas Gutierrez (Project Manager)
Table of Contents
Introduction
In the effort to find an effective set of encoders to use on the ModWheels cars and to strengthen the synergy between ModWheels and Sojourner a trade-off study was performed. This trade study was aimed to find an encoder that could satisfy the desired functionality while drawing low current and power minimize the effect on the power budget.
Discussion
In this study two encoder types were investigated in this study, optical encoders and Hall Effect encoders. Optical encoders are designed to transmit an infrared light and reflect light off the rotating encoder wheel and then receive that reflected light with a phototransistor and that then creates an analog signal. This also can be applied to a wheel that has a spinning disk attached to the shaft of the motor allowing for light to reflect back as the shaft rotates. Hall Effect encoders use multipole magnets attached to the shaft of the encoder and one or more Hall Effect sensors (a thin piece of rectangular p-type semiconductor). As the shaft rotates the Hall Effect sensors, through induction, convert the magnetic field into a voltage that can be read by the microcontroller. [1]
For the ModWheels car a different type of Hall Effect encoder was studied since the Sojourner project is using a micro metal gearmotor as opposed to the extended shaft GM6 motors that ModWheels will be using.
Specifications
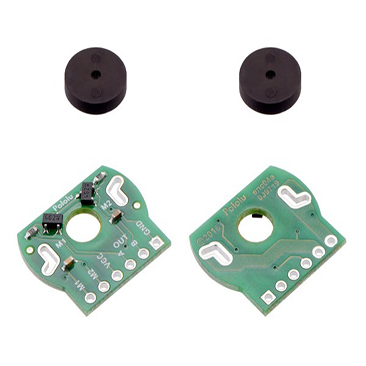
Magnetic Encoder Pair Kit for Mini Plastic Gearmotors, 12 CPR, 2.7-18V [2]

Size: 20 mm X 16.5 mm
Weight: 2.4 g
Minimum operating voltage: 2.7 V
Maximum operating voltage: 18 V
Counts per revolution: 12 (6-pole magnetic disc with 2 channels)
Output: Digital
Optical Encoder Pair Kit for Micro Metal Gearmotors, 3.3V [3]

Size: 9.6 mm X 11.6 mm
Weight: 0.7 g
Voltage: 3.3 V
Average input current: 24 mA
Counts per revolution: 12 (3-tooth wheel) / 20 (5-tooth wheel)
Output: Analog
Conclusion
For ModWheels the more desirable encoder would be the Magnetic Encoder Pair Kit for Mini Plastic Gearmotors because these encoders are made specifically for the extended shaft GM6 gearmotors. Additionally, after discussing with Sojourner the two projects came to the conclusion to go with the respective Hall Effect encoders for the respective motors in an attempt to maximize project synergy.
References
[1] http://www.electronics-tutorials.ws/electromagnetism/hall-effect.html