{kind=link}
Fall 2015 MicroBiPed Center of Mass
WORST CASE SCENARIOS FOR CENTER OF MASS TESTING
By Michael Balagtas (Manufacturing Engineer)
Approved by Paul Oo (Project Manager)
Approved by Railly Mateo (Systems Engineer)
Introdcution:
Solidworks calculates the center of mass and the overall mass of the model based on the present stance of an assembly. While walking, it is important to have the center of mass as close to the most supported leg to maintain balance. Unfortunately, only Solidworks premium has the motion analysis option, which calculates the parameters while the model is in motion.
Method:
There is still an alternative to the center of mass study without the premium version, and that is with a worst case scenario test. That is, position the assembly in a manner where it is only supported by one foot, and the other is completely in the air. Naturally, there are two worst cases for a biped – one for the right leg and left leg worst case.
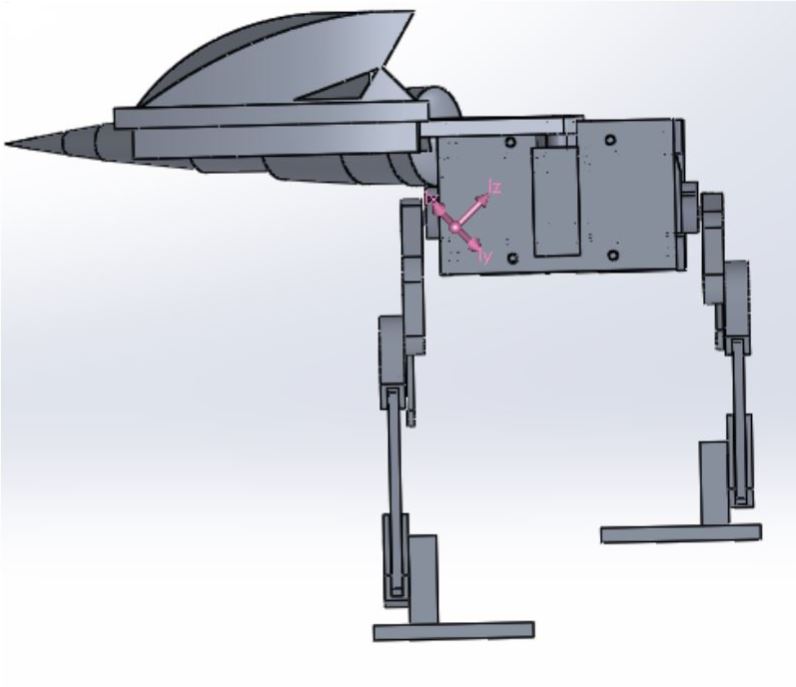
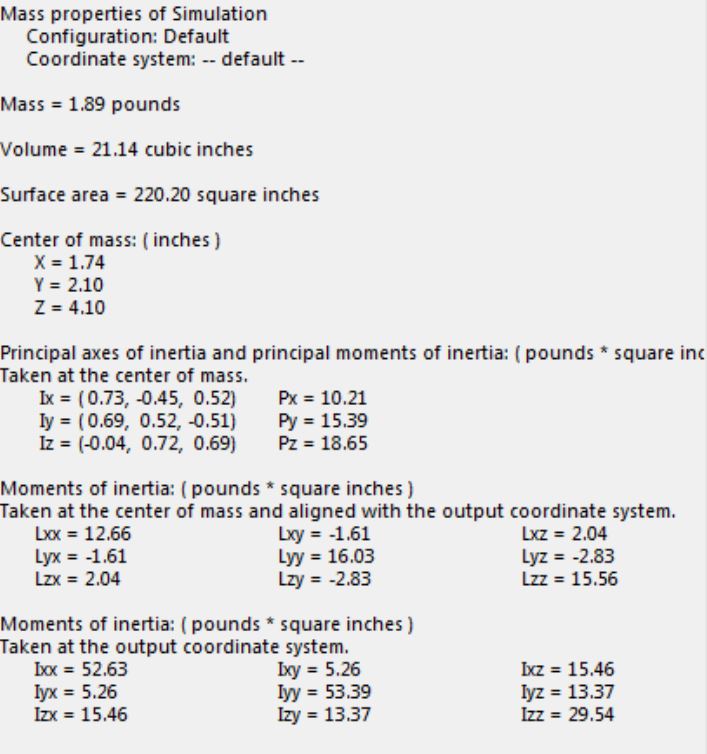 Worst Case Scenario: Right Foot. The information on the bottom comes from the mass properties option in the Solidworks tools tab. Note the purple axis on the robot. That shows the center of mass on the robot, which is close to the joint, which is a good thing while walking.
Worst Case Scenario: Right Foot. The information on the bottom comes from the mass properties option in the Solidworks tools tab. Note the purple axis on the robot. That shows the center of mass on the robot, which is close to the joint, which is a good thing while walking.
The image above shows the worst case scenario test along with mass properties on BiRex. The goal is to have the pink axis as close to the leg as possible. When the pink axis arrows are at the leg (with the foot that is planted on the ground), then the BiRex is balanced. Other methods outside of the frame could be used for compensation.
Conclusion:
For the 2015 Biped team, this method helped validate the Level 2 requirement of maintaining balance while the robot is walking. This does not account for other unforeseen problems, but this test helped with validating one of our core requirements.