{kind=link}
Fall 2015 MicroBiped Walking Code
BIREX WALKING CODE
By Brian Walton (Controls Engineer)
Approved by Paul Oo (Project Manager)
Approved by Railly Mateo (Systems Engineer)
Introduction to IDE:
The walking code for the μBiped project was coded in the Arduino IDE using the basic syntax used in C, C++, and the like. The use of a servo-driver dictated the need of having the Adafruit servo-driver library (available here: https://github.com/adafruit/Adafruit-PWM-Servo-Driver-Library) added to the already existing Arduino libraries for use. The addition of this library allowed the use of more servos than would have normally been available using the Arduino alone.
PWM:
In order to control individual servos the Arduino would use PWM signals to the servo-driver with each PWM associated with a different angle. These different PWM values were then set in an array in order to allow smooth movement of the legs, head, and tail that the servos were made to control. In order to get smoother movement, longer arrays were required to show more individualized movements.

Fig. 1 – Include Files

Fig. 2 – .h Files
Once the arrays started getting passed 100 individual elements the Arduino Processor no longer had enough memory to handle this. Therefor look-up tables had to be incorporated. Using look-up tables allowed the change from the Arduino being unable to handle the individual arrays (which at the time there were only 4 arrays), to being able to handle 12 individual arrays (only taking up 17% of the dynamic memory and 51% of program storage space). In order to use program memory, figures 1 & 2 show how all of the arrays had to be saved as “.h” files and saved in the same file as the Arduino program.
Array Variables:

Fig. 3 – Variable Names

Fig. 4 – Variable Names (2)

Fig. 5 – Variable Names (3)
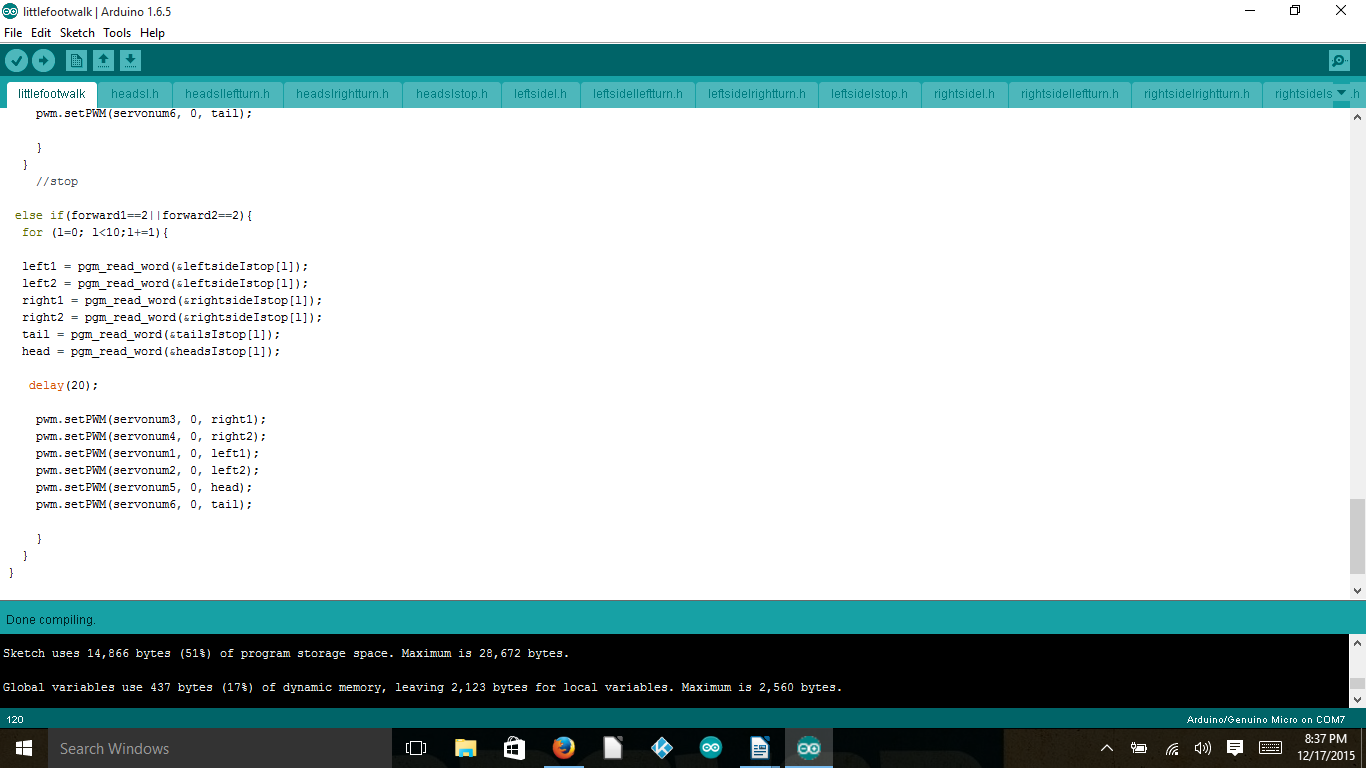
Fig. 6 – Variable Names (4)
Figures 3, 4, & 5 shows the variables used in order to add ease to coding later. The variables i,j,k, and l were added in order to scroll through the individual arrays. The variables forward1 and forward2 were defined in order to communicate with the Arxtera application as the combination of these 2 variables would allow 4 different individualized movements desired by the project: forward, left, right, and standing still. The variables left1, left2, right1, right2, head, and tail are used to take the arrays and translate it to the 6 individual servos and allows the program to be more iterative.
Long Array:

Fig. 7 – Array Example
In the Arduino IDE the included files show up as long arrays in different tabs along the top of the IDE. The creation of these “.h” files were made in WordPad and is shown in Figure 7 & 8.

Fig. 8 – WordPad
In order to learn how to use program memory to save space Professor Hill gave an example that will walk you through the process: http://web.csulb.edu/~hill/ee400d/Technical%20Training%20Series/(use the link that shows “Arduino_LookupTable.Zip”).