{kind=link}
Fall 2016 Velociraptor (W): Bluetooth Commands
By: Gifty Sackey (Mission, System and Test)
Approved by:
– Lam Nguyen (Project Manager)
– James Lee (Division Manager for Mission, System and Test)
Introduction
This blog post will be discussing velociraptor’s communication system; the ArxRobot app and the Arxterra Control Panel that is used to control the robot. At this point in time, the velociraptor group has been able to settle on a design for the velociraptor robot and is currently working on the systems and electronic controls for the robot.
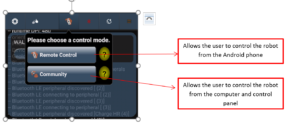
The velociraptor robot will be able to receive commands through two main modes. It will be either through the community mode or remote control mode. In the event that the velociraptor will be receiving commands from the android phone, the Arxterra app would need to be configured into a remote control mode to make it possible. On the task bar located on the first line of your app, select the button that resembles the app logo merged with the phone. Once the user selects this, they can then select remote control mode. If the user would like to change the control settings back to the control panel, follow the steps above regarding which tab button to select but instead choose the community mode to activate the control panel. When the control commands are sent from an android phone to the velociraptor robot, this communication is made possible with the help of the HM-10 Bluetooth module embedded in the 3DoT board with the help of WIFI or data services from the phone company.

Diagram 1: This shows when the robot has been located before boarding.
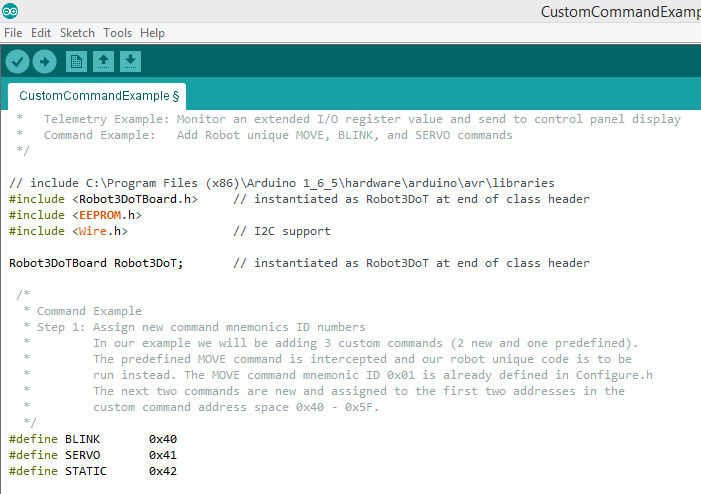
Students are allowed to have custom commands on the app and have the commands be unique to their robot. Command types must have their own unique identifier called a Command ID. These ID’s can be chosen from a range of 0x40 (64) to 0x5F (95). For our velociraptor group, we will have a custom command for static walking. The custom command for walking is being defined with the hexadecimal number 0x42. The static walking custom command has been created as a Boolean type whereby the user is allowed to either select an on or off. By default, the static walking custom command is created to be in the off mode.
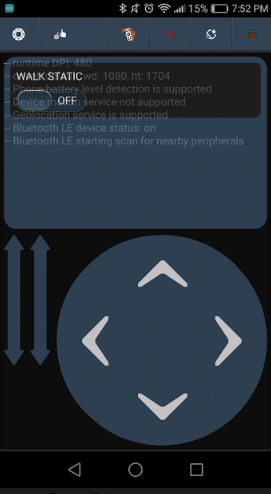
The following image provided below displays the control panel after the Velociraptor robot has been boarded from the control panel. On the control panel, towards the right side of the screen the app connects to the phone’s camera. Aside from the custom commands that can be designed by students, there are some examples of telemetry commands that are embedded in the application. Amongst these are options for the user to be able to display the phone’s battery, roll and pitch. Students are able to access these modes through the robot capabilities configuration.
Conclusion
In order to have the custom commands displayed on the control panel, the user has to select the community mode. On the other hand, to be more secure with the robot and its commands, users are also allowed to control the robot using the remote control mode option instead. When user’s control the robot from the remote control (phone), they are limited with the options and commands they see on the screen.
Diagram 1: This shows when the robot has been located before boarding.

Diagram 2: Clicking on the green robot allows students to board the robot

Diagram 3: Shows the communication to the phone’s camera