GradBot – Fall 2019
What Could Have Been For App Configuration
Author/s: Shannon Hormozian, PM, MST
Verification:
Approval:
Table of Contents
Introduction
Originally GradBot was supposed to operate in two modes, one follower and one user controlled. As we began the design process, we realized that we would need to implement a PID controller to help with the major balance issues of the robot, and this task superseded the work being done on the follower aspect. Unfortunately in the end both the PID and the follower mode failed, but we are hopeful that other generations will follow through with our original plans.
Follower and User Input
As mentioned before, GradBot was supposed to have two modes which would have been turned on and off via the ArxRobot app or control panel. We researched many projects such as this [1] following cooler and this [2] following luggage technology. To do this, we were looking into using a GPS module such as the PAM 7Q breakout board seen below.
Figure 1. GPS Module
This was to be connected to a compas (Adafruit HMC5833L, see below) and would bounce signals off of the phone and the HM11 with an included code that would test making sure the robot was no more than 5 feet from the user with the phone.
Figure 2. Adafruit HMC5833L break out board
PID Takes Over
At our v1 demo, Professor Hill noticed out little robot was wobbling more than he would have liked. And this simple problem changed our path for the rest of the semester.
Click here to view our V1 demo.
The solution for the wobbling took over and the rest of our time was focused on getting the PID to work.
With this new electronics portion, application configuration would need to be adjusted as well. The new plan was to still have two modes, this time, one would be user controlled to be able to move forwards, backwards, left, and right, meaning the z-axis for the PID would have to be disabled allowing the robot to move left and right without the controller correcting it back to a straight line. The second mode would be just to move the bot straight forward, meaning the PID would be enabled and actively correcting the balance issues.
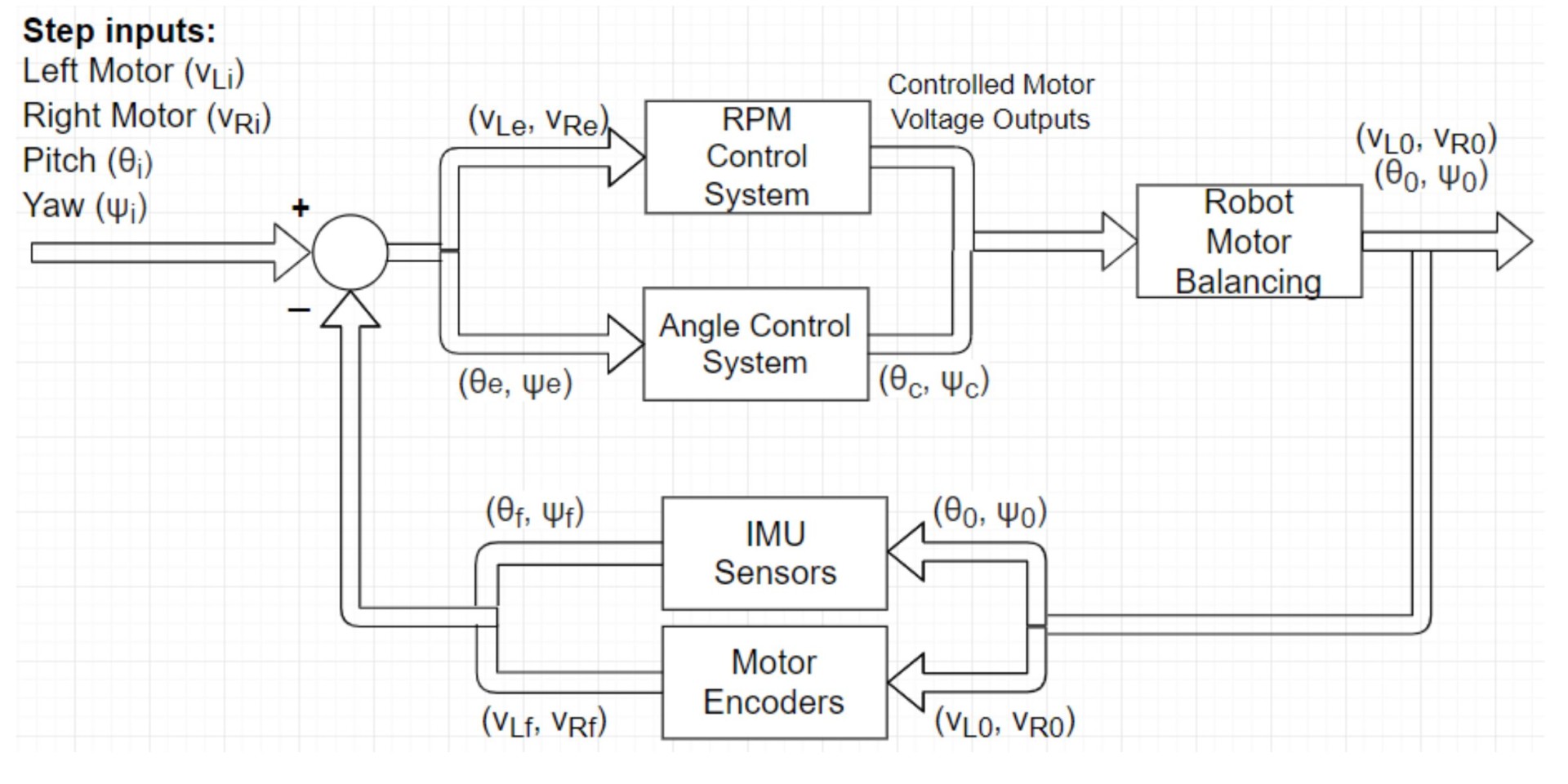
Figure 3. System Block Diagram showing PID
Conclusion
Unfortunately some other issues arose and neither the following aspect nor the PID was able to be implemented.
References/Resources
- [1] “Make an Autonomous “Follow Me” Cooler”, Hackster.io, 2017. [Online]. Available: https://www.hackster.io/hackershack/make-an-autonomous-follow-me-cooler-7ca8bc. [Accessed: 09- Sep- 2019].
- [2] C. Nuñez, A. García, R. Onetto, D. Alonzo and S. Tosunoglu, Electronic Luggage Follower. Miami: Florida International University, 2010.
- [3] G. Hill, “The Engineering Method”, Arxterra. .