GradBot – Fall 2019
Preliminary Design Review of GradBot
Author/s: Shannon Hormozian, PM, MST
Verification:
Approval:
Table of Contents
The PDR happens somewhere in the middle of the semester, so much of this information has been amended and updated. The most up to date information can be found on the Final Blog Post.
Here’s a short list of things that have been changed, removed, or updated:
- Project Schedule
- Requirements
- Mission Profile & Project Objective
- System Block Diagram
- Exploded View
- Resource Reports
Members
Shannon Hormozian – Project Manager and MST
Taylor Manning – D&M
Project Objective
GradBot is a prototype of a toy robot that is marketed to soon-to-be graduates, ages 12+. It is designed to roll like the astro-mech droid BB8, but will have a graduation cap on top and a clear sphere body showing a pyramid inside that stays upright and houses the electronics. It should be operated in one of two optional modes: be controlled by the user with the Arxterra app or be following the graduate across the stage.
Mission Profile
To design a prototype of a sphero robot that is made to walk a student across their graduation stage with a matching graduation cap.
Level 1 System Requirements
1.1 The robot shall be controlled in any x-y direction
1.2 The robot shall be aesthetically pleasing
1.3 The pyramid will be in a sphere
1.4 The robot shall have a graduation cap
1.5 The robot will be designed as a prototype for a toy (ages 12+)
Level 2 System Requirements
2.1-1 The robot shall be controlled using a bluetooth module connected to an app
2.1-2 The robot will have two gm6 motors
2.1-3 The robot will have two wheels
2.1-4 The robot should have a follower mode
2.1-5 The robot should move straight
2.1-6 The robot should have a low center of mass for added balance
2.1-7 The robot should have a gyroscope to prevent wobbling
2.2-1 The wheels, internal electronics, and all sensors will be hidden
2.2-2 The pyramid will be shaped like a 3D printed replica of the Walter Pyramid at CSULB
2.2-3 The pyramid body will be blue like the Walter Pyramid at CSULB
2.3-1 The sphere will be clear
2.4-1 The grad cap shall be held on with magnets and 3D printed mechanisms
2.4-2 The grad cap shall remain at the top of the clear sphere during robot operation
2.5-1 The robot should stay intact during operation
2.5-2 The robot should easily connect to the app
System Block Diagram
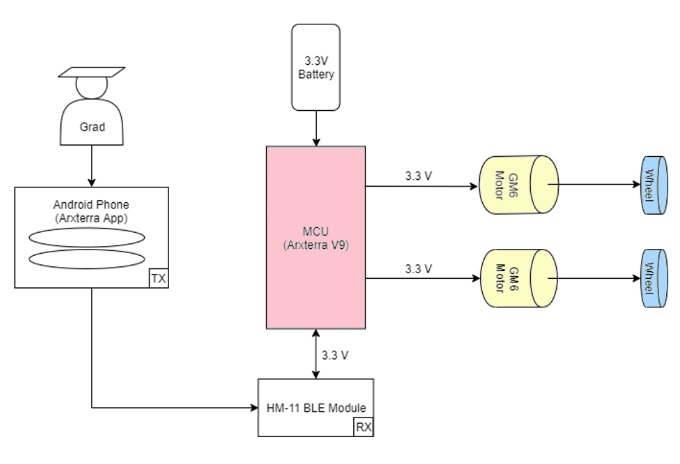
Figure 1a. system Block Diagram

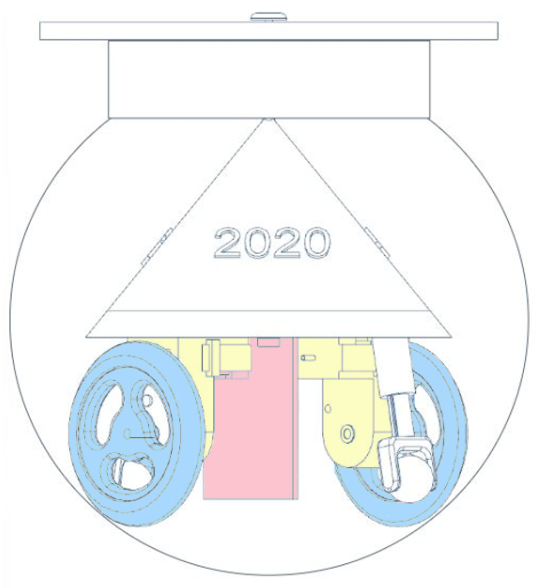
Figure 1b. System Block diagram viewed as part
Product Breakdown Structure
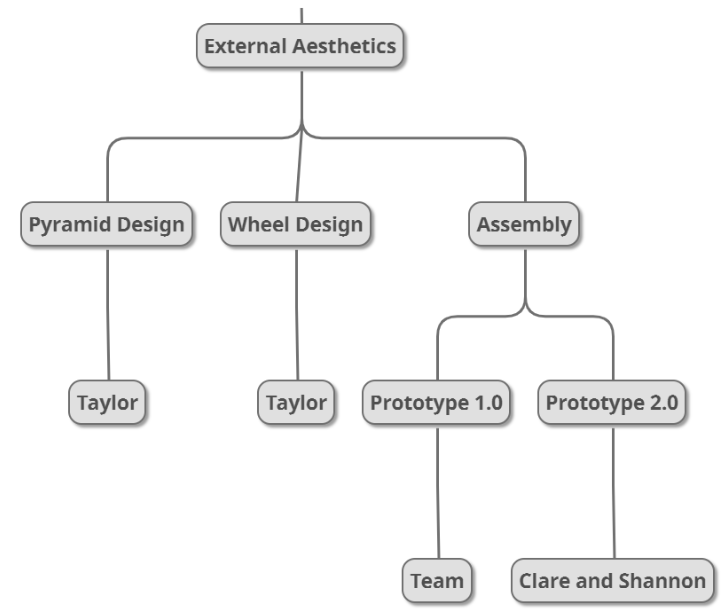
Figure 2a. Left Portion of PBS
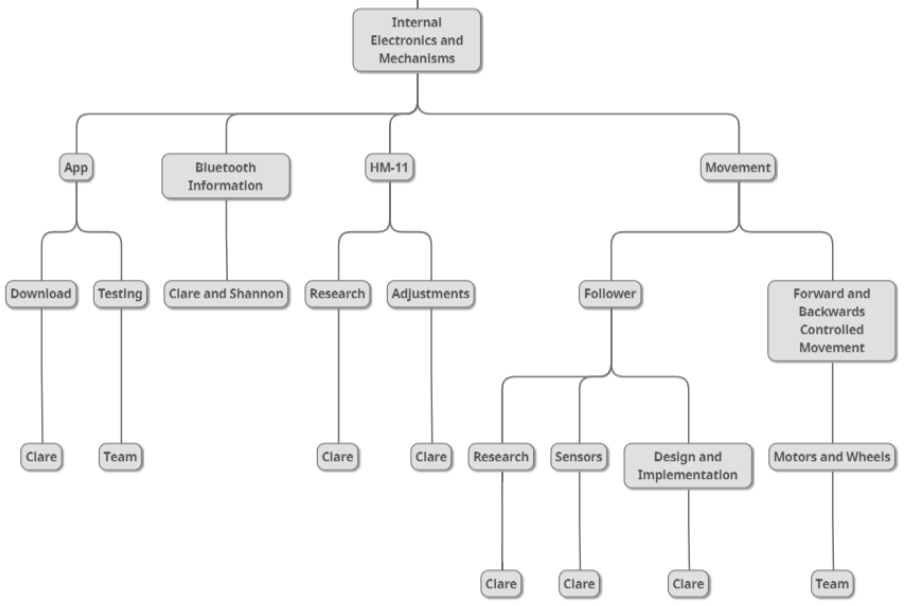
Figure 2b. Right Portion of PBS
Electrical Fritzing Diagram
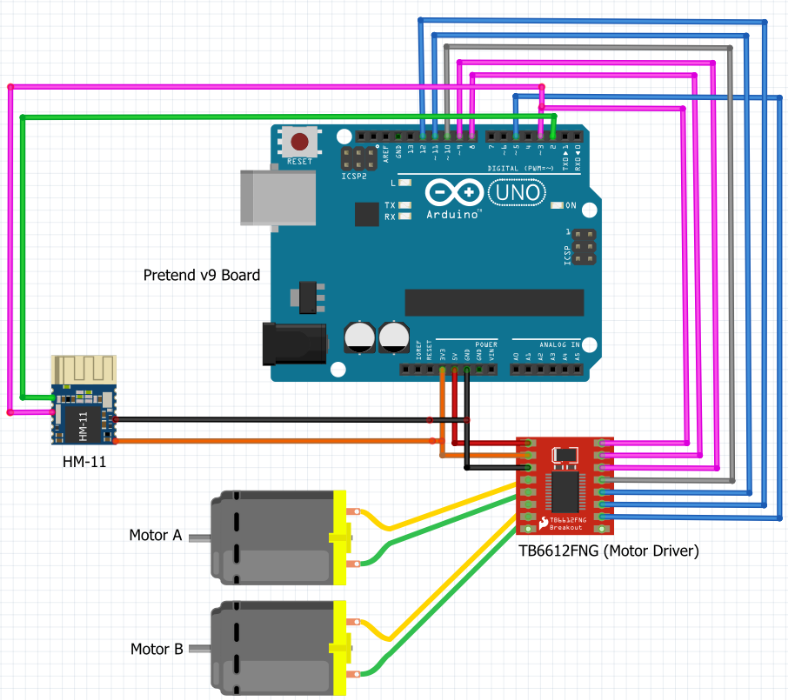
Figure 3. Electrical Fritzing Diagram using Arduino Uno
PID Controller
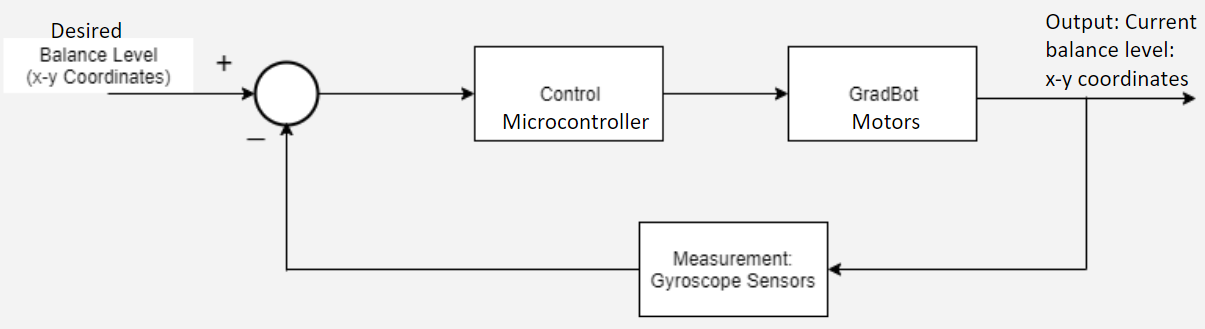
Figure 4. First Draft of Block Diagram for PID Controller
Follower Components
The robot should follow the graduate across stage, but it needs a few extra components to do so. So far, we have picked out the PAM-7Q GPS Module. It seems easy to work with, operates between 3.3 V and 5 V, and we have tested it with an Arduino.
We also need a compass so the robot knows which direction it’s heading. We have picked out an HMC5883L compass for the same reasons as the GPS module.
Our group found an engineering project online, where three people successfully got a cooler to follow an individual around outside. We would like to customize their project to fit GradBot and utilize the V9 board instead of the Arduino Uno, if possible.
Breadboarding will be done on the Arduino first, and then moved over to the V9 if there are no serious issues.
Exploded View of GradBot
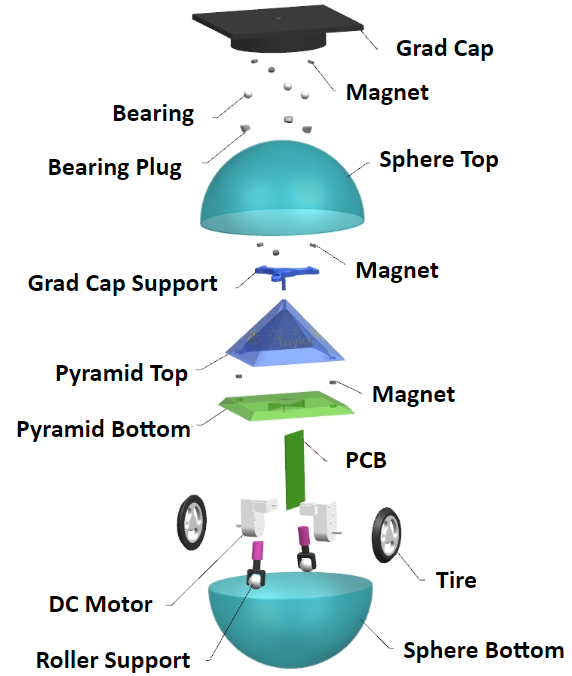
Figure 5. Exploded view of GradBot 2.0
Work Breakdown Structure
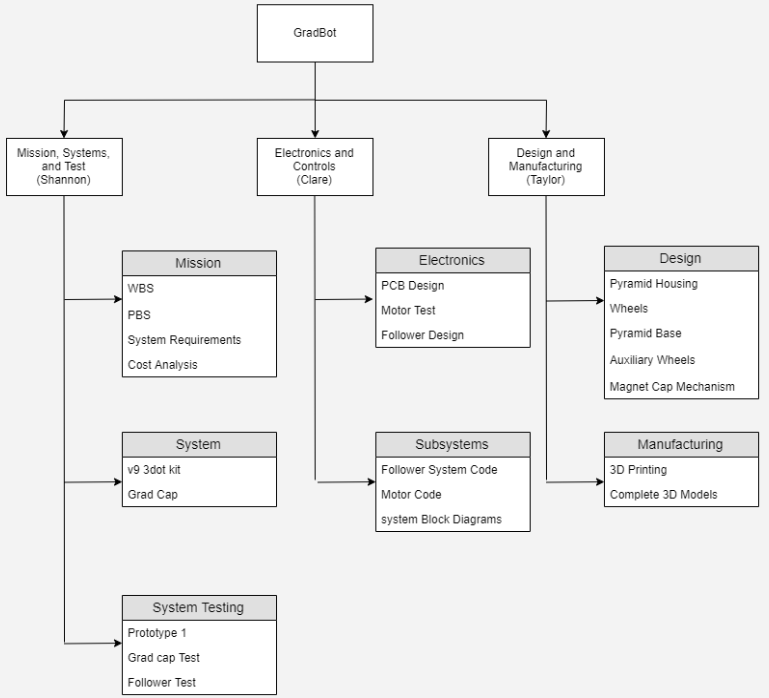
Figure 6. WBS
Missions, Systems, and Tests
Tasks: Documentation – Close out documents, project status reports, requirement lists, timelines, schedules, and keeping the team on track with due dates and reaching goals.
Product Purchasing and Testing: Verify and approve all purchases, complete all version demos, component wiring and testing.
Planning: Organize out of class meetings and projected schedules.
Design and Manufacturing Overview
- Pyramid Structure – Each piece, top and bottom, will house two magnets for secure attachment during operation.
- PCB Mounting – A mount was created in the center of the base, effectively dropping the heaviest part of the PCB (the battery) to below the GradBot’s direct center.
- Tire Structure – The tread was removed from the original tire design and a slope (equal to that of where it contacts the sphere) was added, giving more surface area in contact with the sphere at any given time.
- Wheel Structure – The wheelbase was updated to be sturdier and better match the tire redesign.
- Roller Supports – Auxiliary wheels were created to help balance the bot and stop it from tipping. This design consists of two 3D pieces and a ball bearing.
- Grad Cap – A 3D design of a graduation cap was modeled with a specialized “cored out” and rounded base which match the portion of the sphere it will sit on.
- Grad Cap Support – A mechanism designed to house the second set of magnets, this time on the inside of the sphere.
Project Schedule
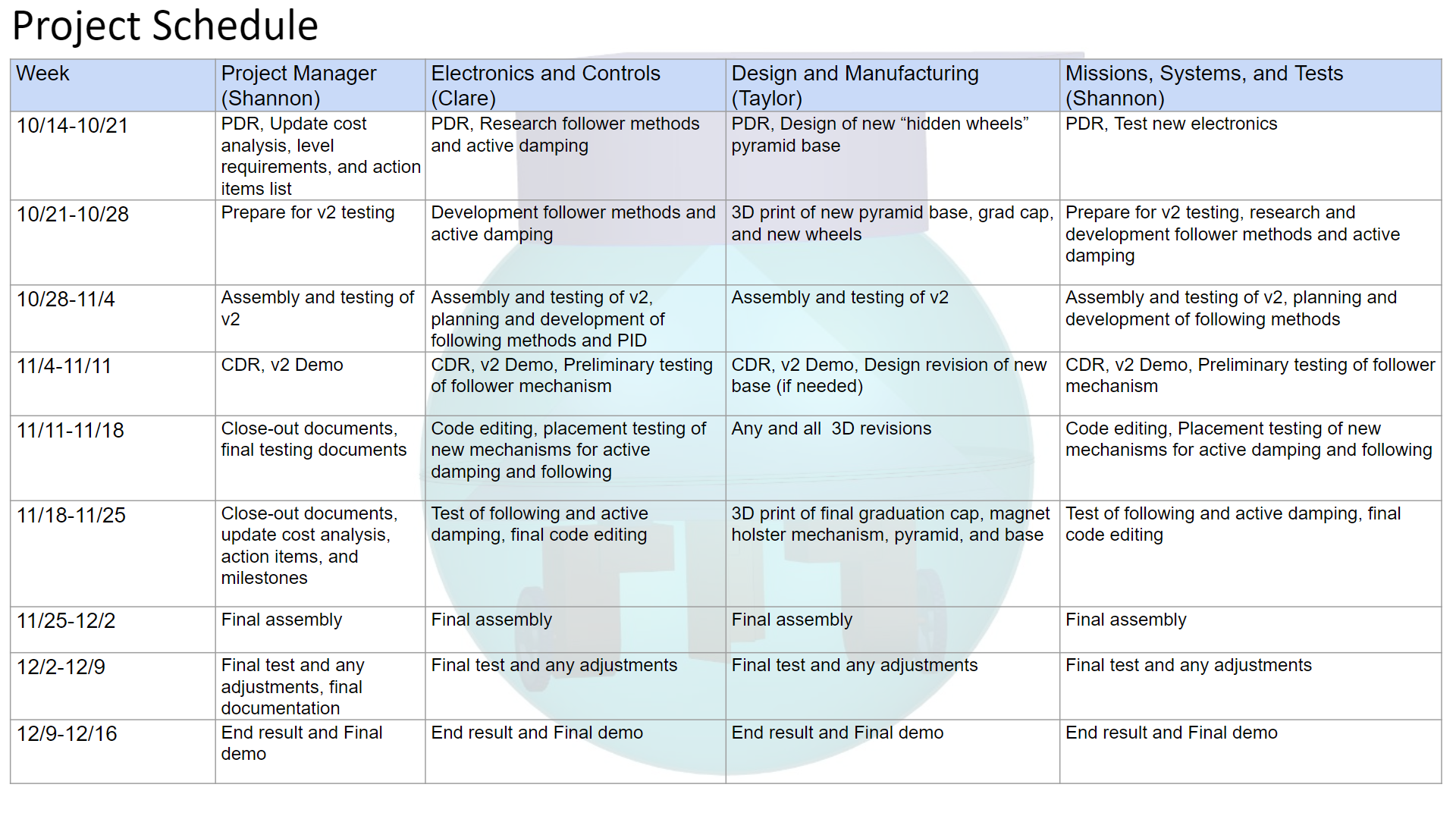
Figure 7. First Draft of Project Schedule
Two GM6 motors: 130 mA, 150 rpm, and operates at 3.3 V.
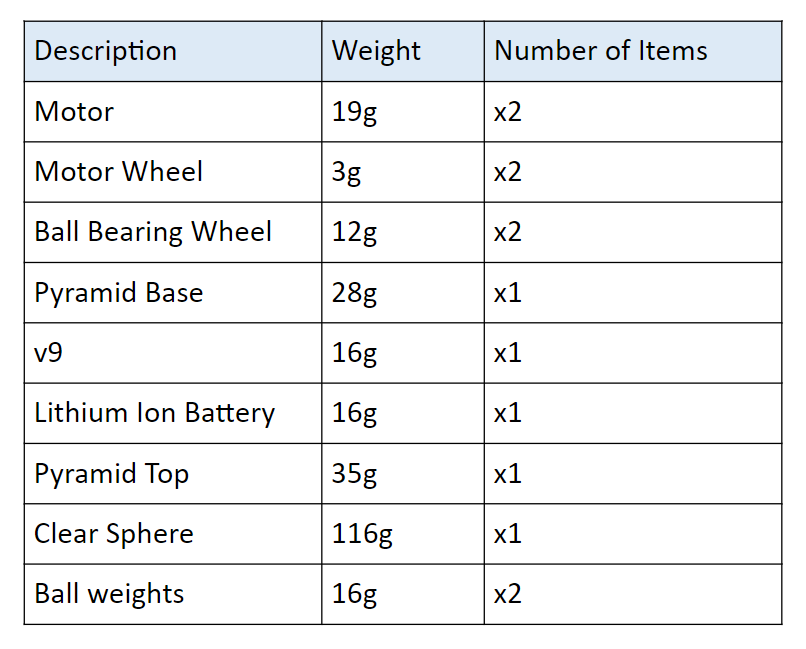
Figure 8. Mass Shared Allocation Report
Cost Analysis
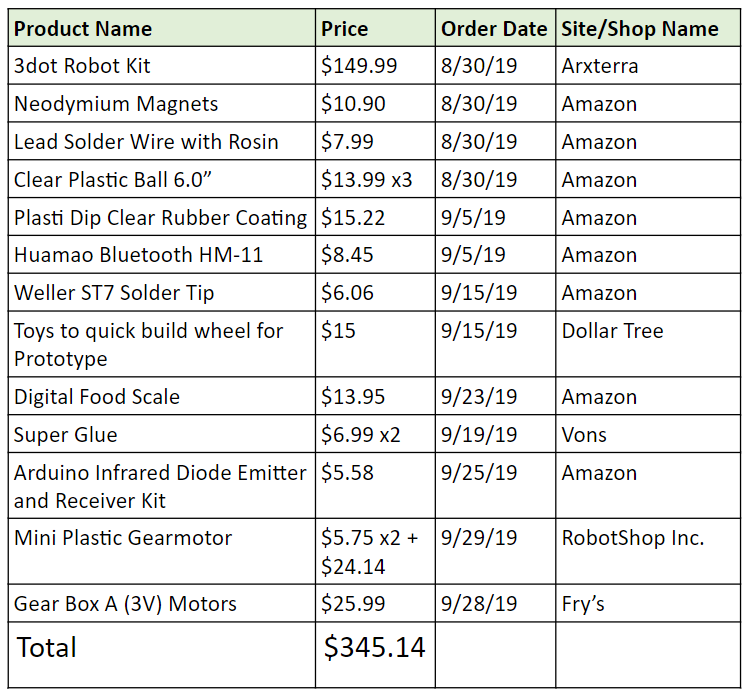
Figure 9. First draft Cost Analysis
All of the updated information can be found in the Final Blog Post.