Dragonbot/Spring/2021
LDC Sensor Selection Research
Author: Muath Almandhari
Table of Contents
Introduction
The goal is to make Dragonbot navigate through the maze autonomously and detect its path without a physical track. Therefore, the navigation solution chosen for this mission is the LDC (induction to digital converter) sensor and a conductive wire embedded on the walls of the maze. The mechanism that Dragonbot will be using is simply by detecting the direction of the conduction reflected to the sensors from the conductive tapes to detect its surroundings and identify its path. This research will go over the criteria and the process that were taken in order to find the right LDC sensors to be used for the mission.
LDC working Principal Research
The working principle of LDC sensors is by detecting the inductions caused by the magnetic field from the observed from the conductive tapes. As a result, it will change the PCB coil’s characteristics which can be modeled as an inductor connected in series with a resistor. Then, these changes will interfere with a capacitor connected in parallel with the coil which then can be transferred to the LDC as frequencies in order to measure the distance between the coils and the conductive tape.

Image1: LDC1612 IC
LDC Research
Before I start my research on the LDC sensors, I had to do some research in order to define my LDC sensor requirement based on. Therefore, I tried to collect information about the design of Dragonbot such as the chassis dimensions, and where the LDCs will be placed within the robot. In addition, I researched the speed of the robot in order to set sensitivity requirements that would fulfill the needs of Dragonbot.
- The dimensions of the Dragonbot’s chassis are approximate to be = 70 * 90 * 50 mm
- We will be placing the LDC sensors at the edge of the front 3Dot front shield. Therefore, the distance between the LDC sensors and the ground is around 20mm
- Speed of the robot.
- Dragonbot’s one-wheel circumference = 5 cm.
- Paperbot’s micro metal gear motor’s rpm= 200rpm
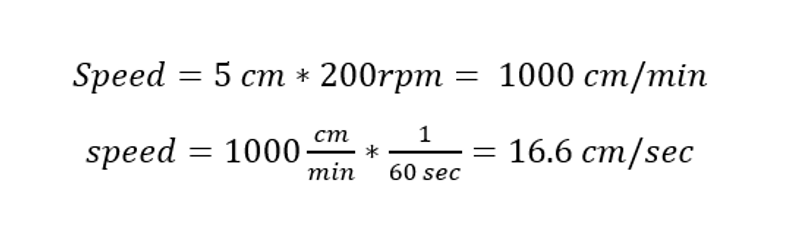
Image 2: Dragonbot speed calculation
LDC Requirements
After collecting enough information about the dimensions of the robot, the placing of the LDCs in the robot, and the speed of the robot, I started creating requirements for the LDC sensors based on the information collected.
- Sensor’s dimensions.
- Length must be between 35 to 70mm (about half or equal to paperbot’s length).
- Width must be equal to or less than 45mm (half or less than paperbot’s width).
- High sensitivity range.
- Higher than 20 mm considering the sensor’s position and the speed of the robot.
- Open Source
- I2C protocol and support Arduino.
- Standard I2C.
- Available libraries for Arduino.
- Attainable price.
- Voltage
- 3V-5V.
LDC Selection Table
For the LDC selection, I set color codes in order to differentiate and show how each LDC sensor is fitting into each requirement individually. For example, the color green indicates that the sensor fits with the requirement perfectly, yellow indicates that the sensor fits partially into the requirement, and red indicates that the sensor does not fit into the requirement.

Table 1: LDC sensors selection table
LDC1612
After comparing between the solutions presented, I noted that the LDC1612 is the most LDC sensor that fits into all the requirements; therefore, it is the most LDC sensor preferable to be used for Dragonbot’s navigation. Even though LDC1612 and LDC1614 share many features because they are both manufactured by Texas Instruments, LDC1612 was a lot cheaper than LDC1614 and its size is more fitting into the requirements. In addition, one of the main features that I found about LDC1612, is that it can handle two channels for one IC which would allow us to have more flexibility in terms of the number of LDC IC that could be used for the Dragonbot.

Image 3: LDC1612 Two Channels
Conclusion
At the end of this research of comparing between the different types of LDC sensors and by referring to the LDC sensor requirements that were put, I found out that LDC1612 is the most sensor fitting into the requirements and the most preferred to be used for the mission. I learned so much from this research on how to organize my requirements depending on the information that I have and how to select the proper sensor.