{kind=link}
Making A Turn
By: Jordan Smallwood (Project Manager)
Approved by: Miguel Garcia (Quality Assurance)
The pathfinder will be performing tank type turns, that is it will be pivoting about it’s center to adjust it’s orientation. This can be done by simply adjusting the direction of each of the wheel sets. For example, if you wanted to make a left turn you would do so by setting the right wheels forward and the left wheels backward.
Depending on where you would like to end up at the end of a turn you must consider the arc lengths that each wheel must travel to perform a certain turn. The pathfinder will be pivoting about it’s center point which is described by the following:
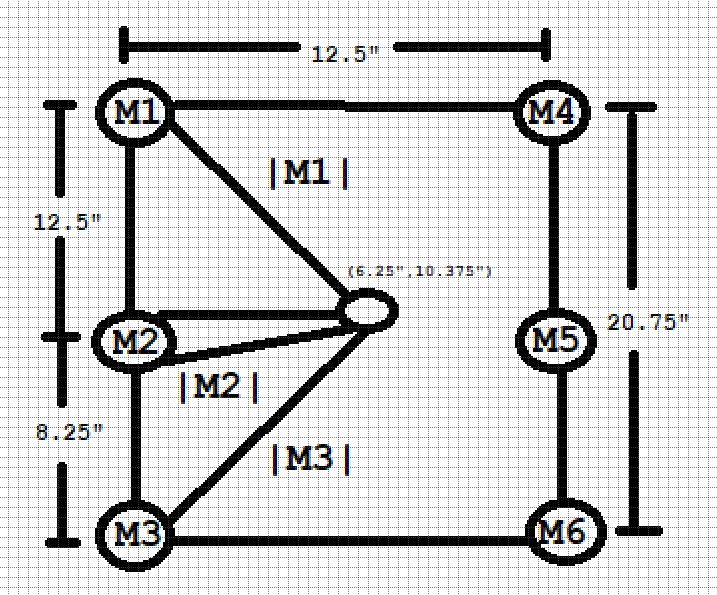
Figure 1: Derivation of soft differential speed ratios
By examining the above figure, we can see that motors 1, 3, 4 and 6 will be traveling along the same arc length. The only difference is that the set of motors 1 & 3 will be spinning the opposite direction of motors 4 & 6. Motors 2 & 5 will also be traveling along the same arc the only difference is the radius related to that arc is smaller than the other motor sets.
If we calculate the radii of each of the motors we can determine an appropriate motor speed ratio to pivot the pathfinder.

Figure 2: Calculation of Magnitudes
If we let MS1 be the speed of motors 1, 3, 4 & 6 and let MS2 be the speed of motors 2 & 5 then we can say the following:
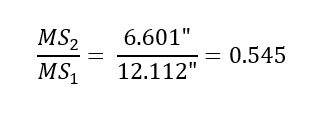
Figure 3: Relating Motor Speeds
Now we know that in order to pivot about the center point we need to have MS2 = 0.545*MS1. In a perfect world all of our motors would be matched and the PWM signal to each would be identical and we could simply supply a PWM signal to each motor with that ratio in mind. However, this is not a perfect world and the load on each motor is constantly changing so instead we will need to monitor the speed of each wheel with simple encoders. Since our motors do not include encoders we will have to engineer our own. For our purposes this will be simple IR sensors strapped to the motors aimed at the spokes on our wheels. We could potentially purchase new motors that have included encoders prior to the gearbox so that we can achieve much better resolution but that will have to be a project for a later semester.