Mini-Rosco/Spring/2020
Mini-Rosco Form factor and Adjustment
Author: Darren Chan (Manufacturing)
Table of Contents
Introduction
The goal of the manufacturing section of Mini-Rosco was to scale down the robot in order for it to be “mini” while also keeping the general form factor of the robot. The original robot file was shared from Jeff Gomes, which included solid works file of the main chassis and assembly file so that we could observe all the individual pieces and determine what was necessary to scale and what to replace. The first version of the chassis was printed using the basic options provided by the innovation space at the CSULB library. Initially Mini-Rosco would be able to go through rapid prototyping, however due to unanticipated events which limited printing capabilities, only one version of the chassis was able to be printed. Instead, new additions would be added to the chassis in order to compensate for the lack of ability to reprint.
Old Rosco
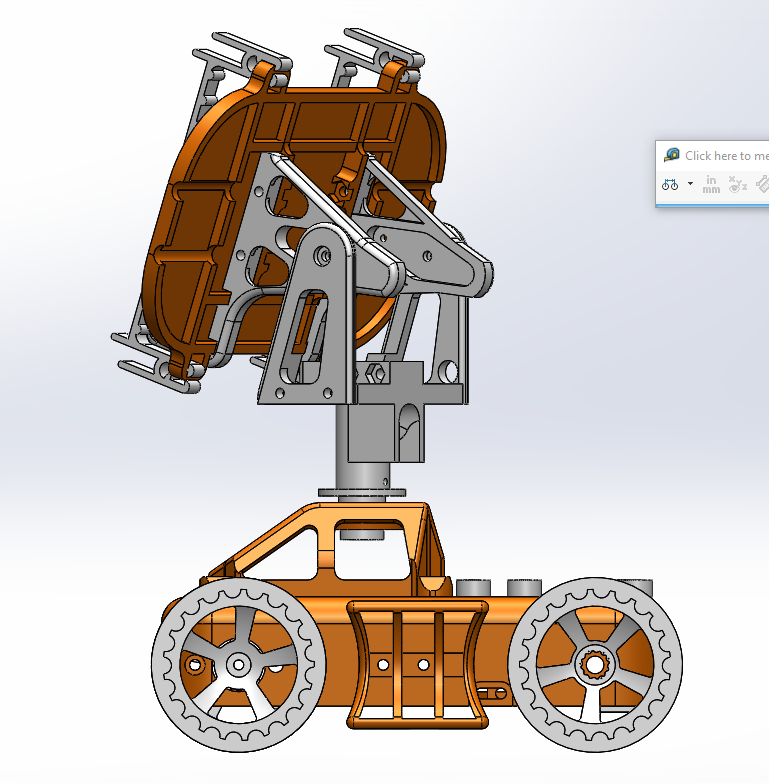
Figure 1: Side view of old Rosco
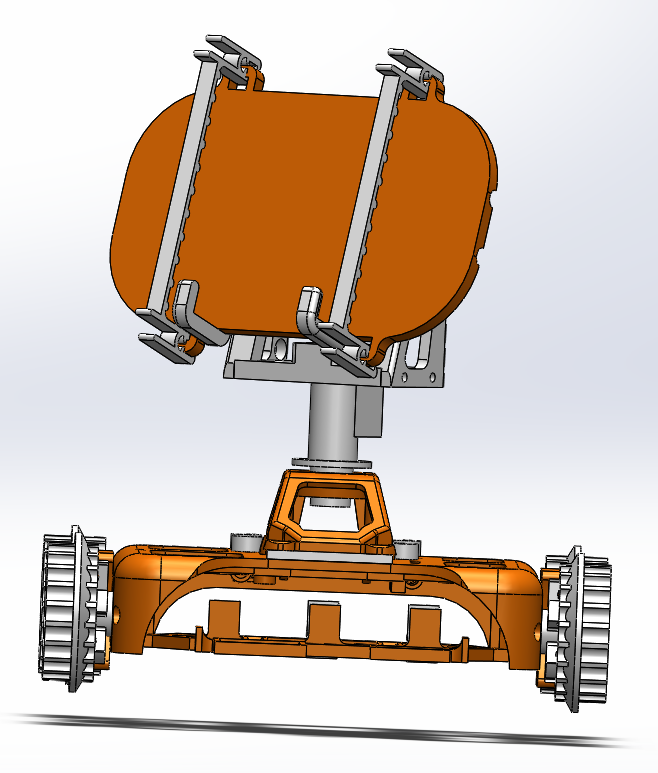
Figure 2: Front view of old Rosco
Although the task was to shrink down Rosco, no specific value was chosen for how much the robot needed to be scaled down. As no concrete value was given, Rosco was scaled down based around how much space the wheel and the servo block occupied. Both of these parts are visible in figure 1 and figure 2. The reason why these parts were selected for the scaling requirements was due to the fact that we needed to keep a space for the servos we would need for the pan and tilt. Due to the fact that the pan and tilt had not been selected at the time of creating the chassis, a general outline was created using the old server block. This was done under the impression that by using the innovation space the group would be able to use rapid prototyping. The wheels were chosen as the second requirement to our scaled-down chassis due to the fact that they would be attached to our motors which we would keep the same. Due to this restriction, only the top face of the Rosco was able to be scaled. Should the sides have been scaled the motors would not have fit within the bounds of the robot, which would also leave the wheels out of place as they entered the robots through cuts on the sides. Shown below is the chassis without the extra features.
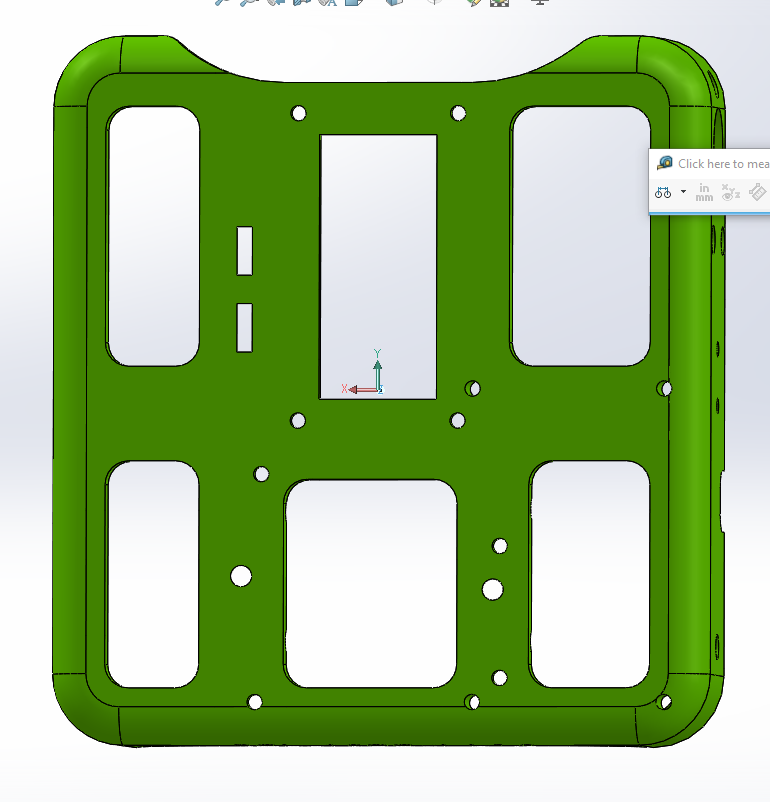
Figure 3: Top view of the chassis part
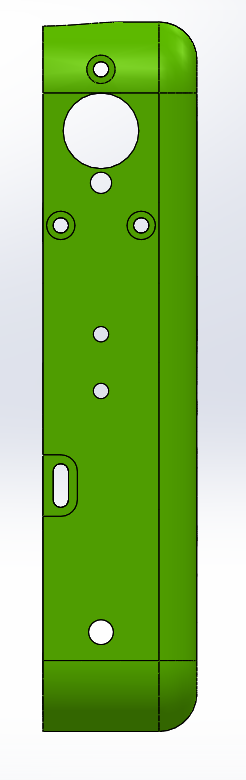
Figure 4: Side view of the chassis part
By measuring the servo block and observing how much space it took up on Rosco, we were able to decide on reducing the size of the chassis to around 75 percent of its original size. This size was meant to be a temporary benchmark in order to observe how the pieces would fit with each other should the chassis shrink by this amount. Due to the size of our base for measurement which was the servo block, it was not possible to shrink the surface down any further without having the wheels become to close to each other that they would touch. Once the scale factor was decided, the next step involved taking a measurement of the cuts that would need to be maintained in order to ensure that all the pieces used were still viable. These measurements need to be recorded due to the fact that once you scale the piece using solid works every sketch is also scaled. This means that all holes, extrudes, and spaces are all shrunk down to 75 percent of their original value. As we intended to use the same servo block area and motors this general shrinking posed some problems for us. Unfortunately, no good solution was found other than recording the measurements of the cuts we would need and manually scaling these pieces back once the robot was scaled down. Solid works gives us the ability to measure the spacing between objects with “Smart Dimension” which is a vital tool when we are trying to reconstruct the shrunken pieces.
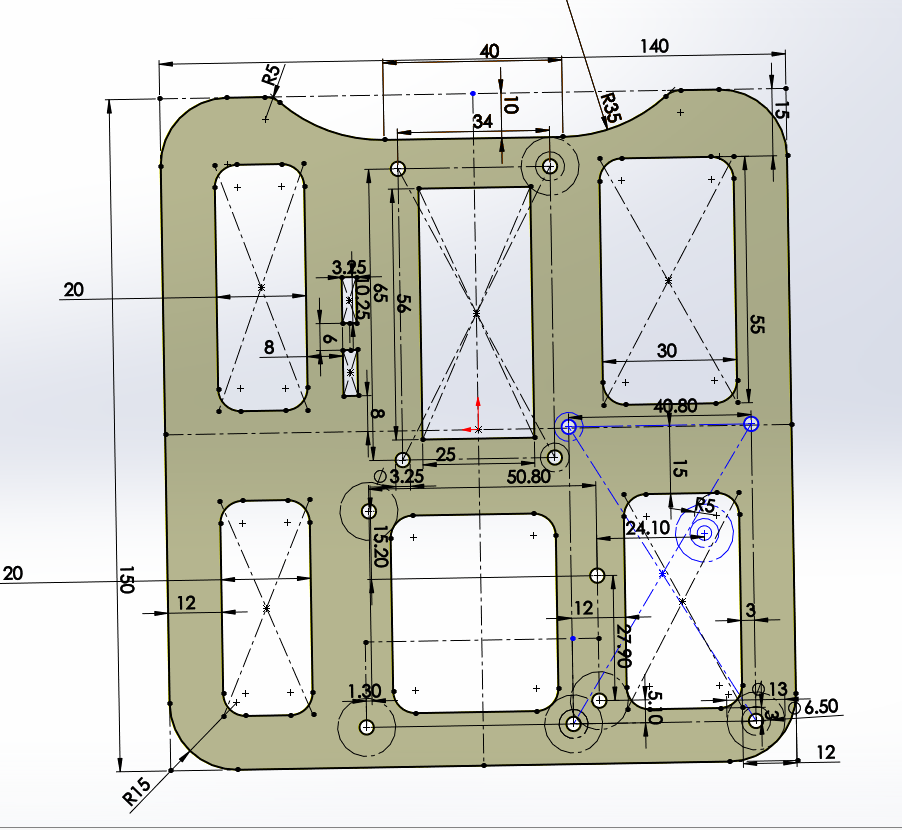
Figure 5: Sketch of top panel of the chassis in solid works showing all available measurements
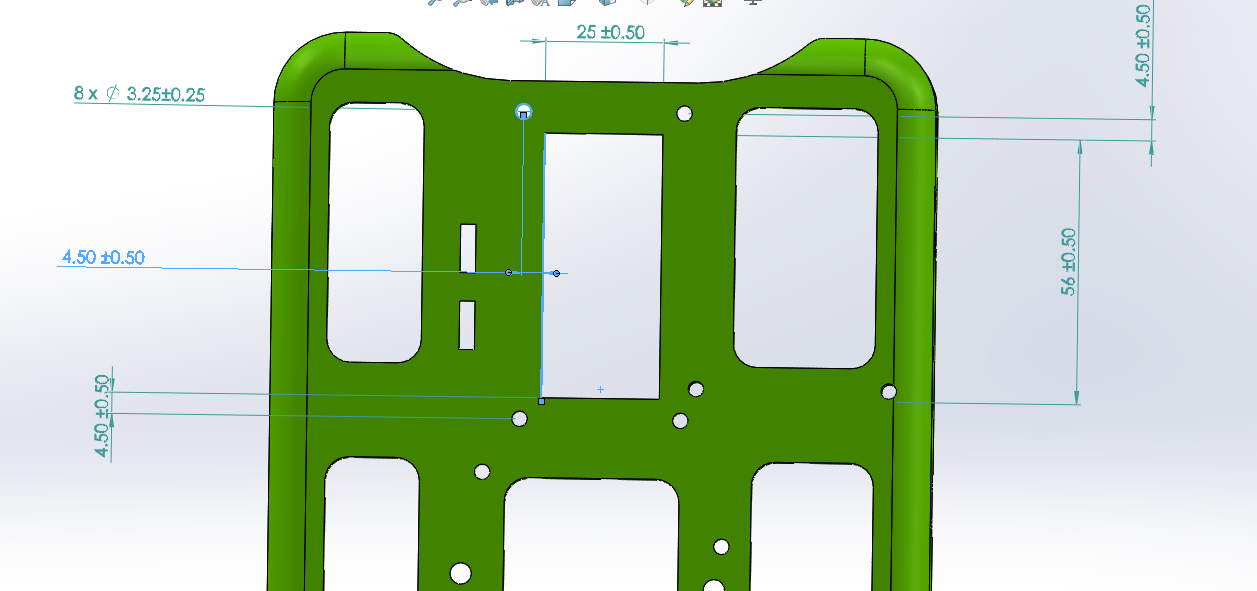
Figure 6: Measurements needed for rescaling
Figure 6 shows all the measurements that are needed in order to make the mounting area of the servo block. The size of the opening will need to be maintained and it is set at 25mm x 56mm. This opening is surrounded by four screw holes which are 4.5mm away. These measurements will need to be edited in the sketch of the chassis once it has been rescaled. In addition, the sides of the chassis also need to be fixed in order to allow the motors and wheels to maintain functionality. Looking at figure 7 we can see all the areas that I marked which are needed in order to readjust the side of the robot. We can that the extrude which makes up the wall of the robot will need to be maintained at 12.8mm. If this extrude is not maintained at this level problems with the location of the motor may occur. In addition, the distances between the center of the circle cuts need to be maintained as they represent where the wheel will be placed and where the opening for the motors will be. Although the main circle is the most crucial, should the other holes not match up, the motor will have to be attached with some form of adhesive. The hole at the far end of the side panel is used for the shaft of the other wheel. This hole can vary in size from the original robot as the tread and wheel will be recreated and so will be built around these new measurements.
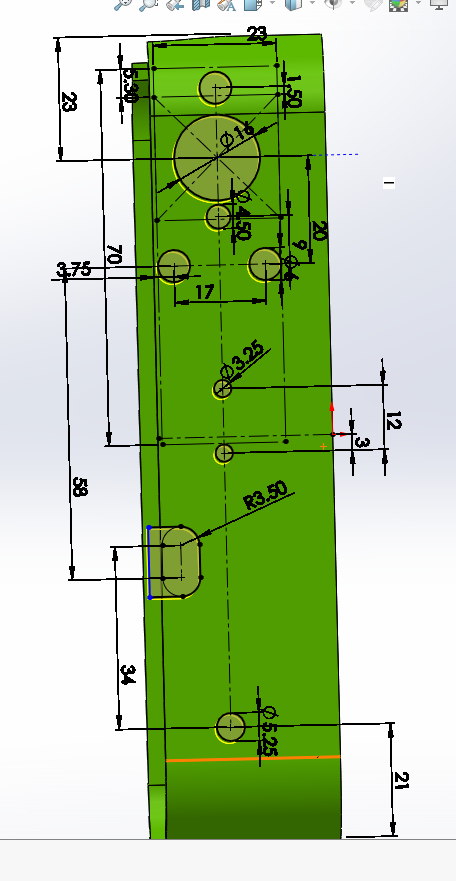
Figure 7: All measurements of the side panel
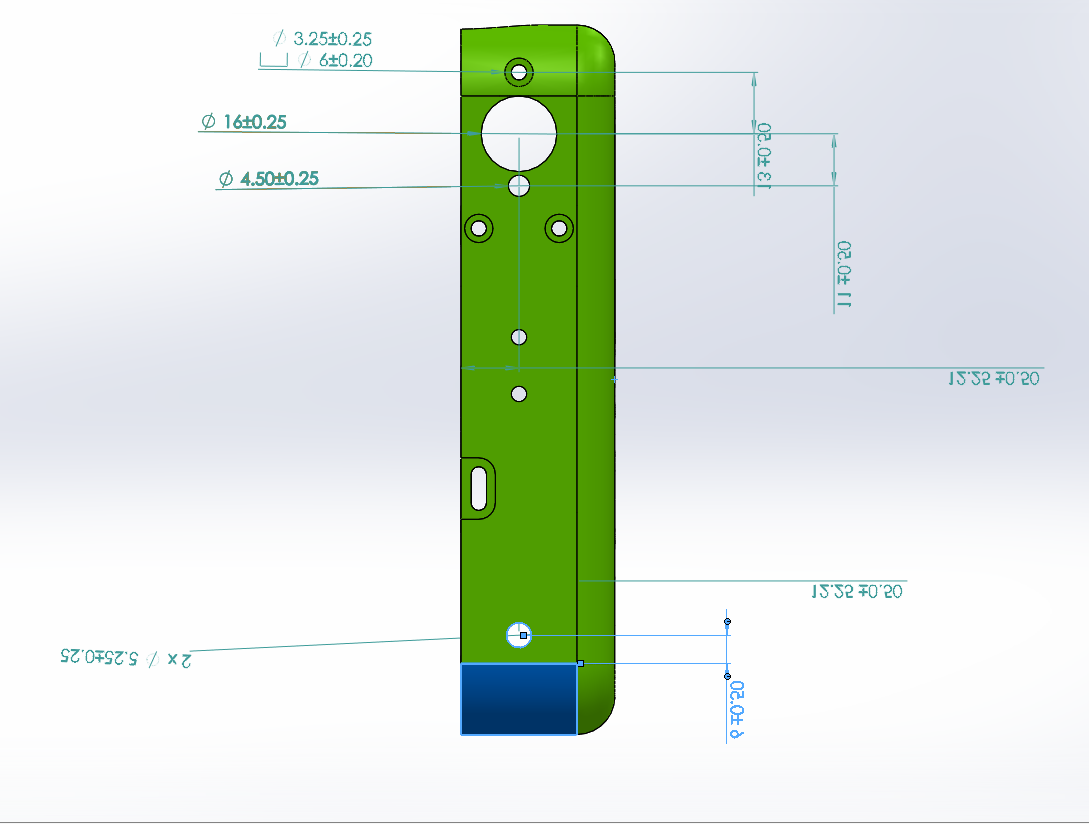
Figure 8: Measurements of the side panel needed for Rescale
Once all the measurements have been taken, the piece can be scaled down. It is best to make a copy of the main file in the event that a mistake was made. With the measurements, it now becomes possible to scale down the entire piece. By using the scale option in solid works we are able to uniformly scale down the surface of the chassis. Something to note is that once the chassis has been scaled, the assembly file using it as a reference will no longer be error-free as the rest of the components used in the file will not have shrunk.
Rosco Form Factor
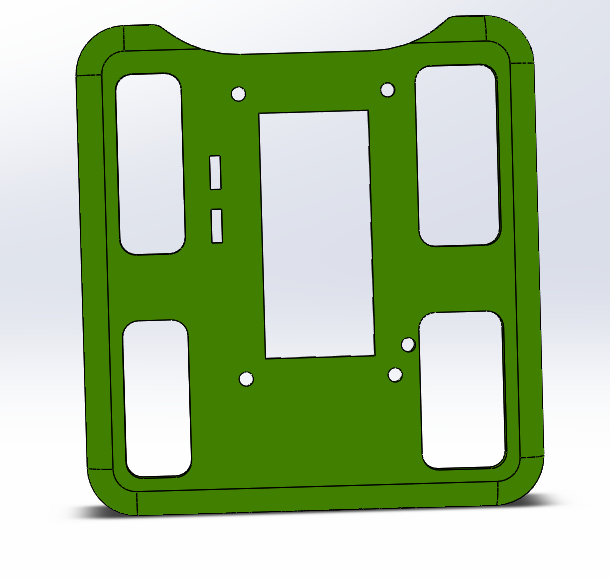
Figure 9: New Chassis
The figure depicted is the new scaled-down Mini-Rosco chassis. When compared with the previous figures we can see that the main cut located on the back of the Rosco is missing and this is due to the size of the servo holder. As we intended to keep this space the same size for our new servos, this cut had to be moved further into the chassis when it was shrunk. The reason being was that once expanded back to its original size, the cut would be outside of the frame of the chassis. In order to compensate for this movement, the back cut was removed from the sketch to make room for the new placement. The rest of the cuts located on the chassis were kept in place as they did not interfere with the larger cut located in the center. The screw holes which were located in the old sketch were also kept and the spacing maintained. This was to allow the use of the screws in order to screw in the mount of the servos. When making these cuts, it is better to make the size a little larger than needed if you are unsure of the exact measurement. This is because a larger size hole can be fixed by applying a washer then screw, while a screw hole that is to small will require a manual fix. Shown in figure 9 are the measurements of the new Mini-Rosco side piece. These measurements were calculated by using the smart dimension with the location option enabled.
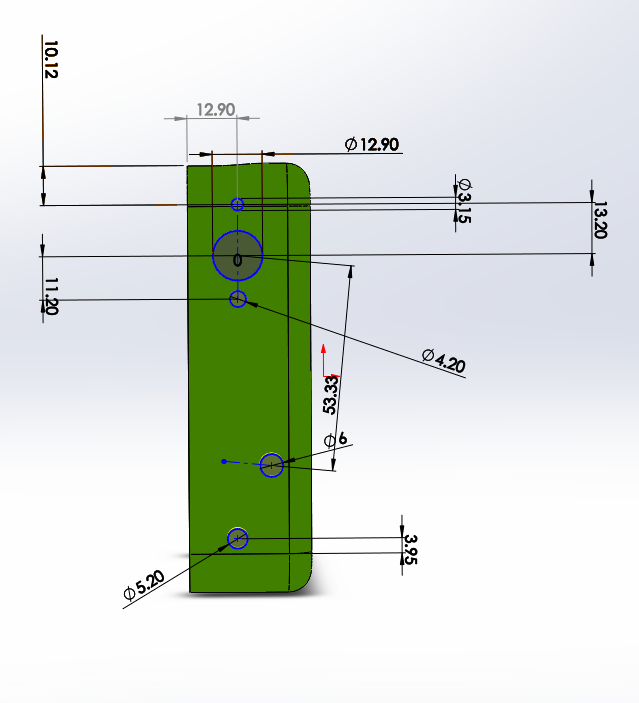
Figure 10: Side panel of Mini-Rosco showing measurements
Mini-Rosco Attachments
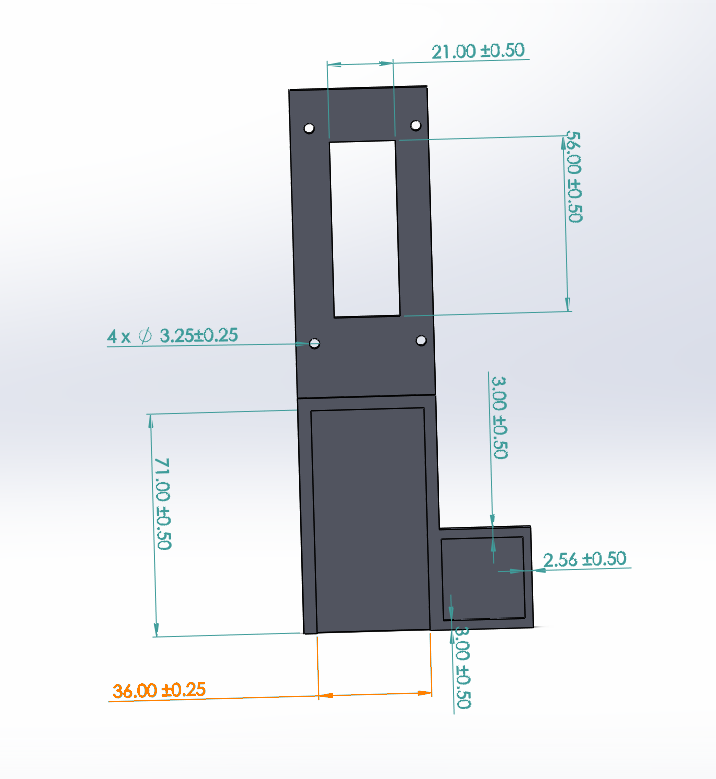
Figure 11: Addition to the chassis to fit the 3dot and gps module
As we have limited printing capabilities, it is not possible for our group to print Rosco more than once. Because of these attachments to the robot had to be made in order to account for certain aspects of the robot that had been overlooked. Figure 10 is the piece that was created in order to account for a few changes to the chassis that could not be done. One such change that was needed was the height requirement that was added due to the new pan and tilt that was purchased. Although the height of mini-Rosco remained the same as the original Rosco, the new addition of the pan and tilt platform had a different way of holding up the server than that of the original design of Rosco. More specifically the servo which controlled the pan option extended downwards father than mini-Rosco accounted for. Because of this, a new platform had to be added in order to make up this difference in height. In addition, mini-Rosco needed to fit the 3dot on the robot, and so the platform was extended out in order to allow the 3dot to sit in the back panel opening. In order to get the calculations needed to create this shelf, the 3dot had to be measured by hand, and in order to ensure that small measurement errors would not stop the 3dot from fitting, an excess of 4mm – 5mm was given in order to ensure the shelf wasn’t too small. The dimensions for the screw holes and the main hole were taken from the Mini-Rosco sketch and copied over. In addition, a module was needed for the GPS so another small shelf was added in order to hold the module up at the same level as the shield. Both of these shelves can be seen in figure 10.
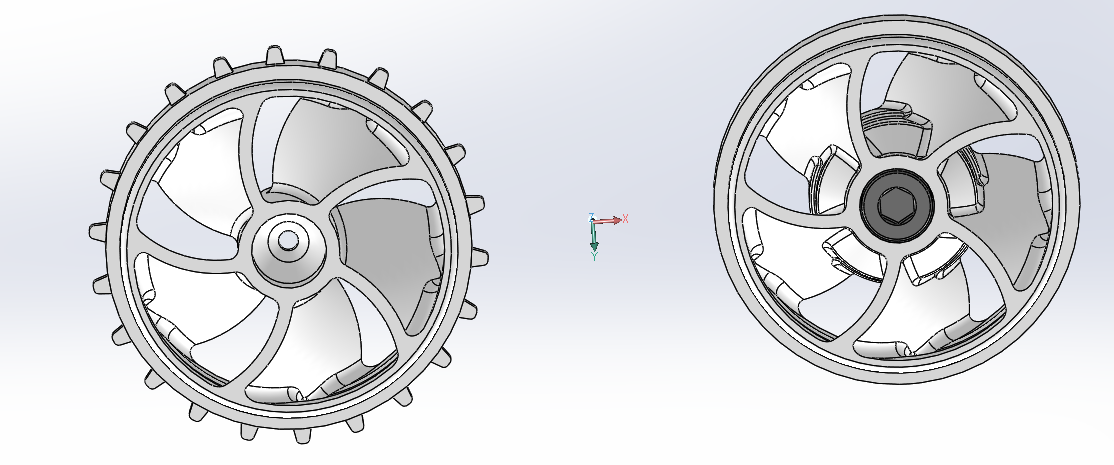
Figure 12: Wheels created by Jeff

Figure 13: Tread for wheels created by Jeff
The wheels and tread for this project were created and supplied by Jeff Gomes. Both the wheel types and tread differ from the original Rosco and resemble those used in Goliath.
Conclusion
The original solid works file of Rosco proved to be immensely helpful in designing the scaled-down version for our new robot. Although only the main chassis of old Rosco was used, being able to see the complete form in assembly helped with the scaling down of the robot. However, although the robot was able to be scaled down, corrections to the robot that should have been made were unable to be completed due to limited printing power. Because of this, a new addition had to be added to the robot which took away from the clean look that the group was expecting from the robot.