{kind=link}
Motor Shields Trade-Off Study
By: Nick Lukin (Manufacturing and Design Engineer)
Two motor driver shields were taken into consideration for the Pathfinder Project, the Pololu VNH 5019 and the Adafruit V2.3. Each shield had its own pros and cons and there were a variety of factors that needed to be taken into consideration during the evaluation process. The figure below shows a comparison of both boards.
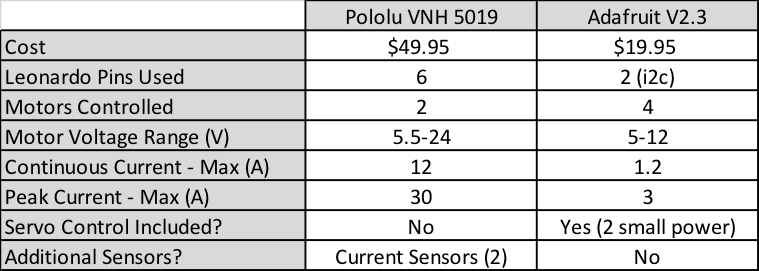
Table 1: Comparison of Polulu VNH 5019 and the Adafruit V2.3
Continuous and Peak current capabilities of each driver shield were evaluated in order to find out what each shield could handle. The motors that we chose to use are 12 volt DC worm gear motors. These motors have a no load current of 0.96 A, a full load current of 1.8 A, and a stall current of 4.8 A. The Pololu VNH 5019 can handle the loads of the motors while the Adafruit V2.3 cannot. The next factor considered was the number of pins used for communication between the Arduino Leonardo and each shield. The Pololu VNH 5019 requires a minimum of 6 pins to control 2 motors. In order to separately control each motor (6 motors) a total of 18 i/o pins would be needed and the Leonardo only has 20 i/o pins total. This creates an issue because pins will also be used to control servos and take in sensor inputs. The Adafruit V2.3 uses i2c for communication and therefore will only require two pins from the Leonardo (SCL and SDA). The next factor taken into consideration was the additional features that each board offered. The Pololu VNH 5019 has built in current sensors that could be used to meet the requirement of stopping each motor under no load conditions while the Adafruit V2.3 has built in servo control that could be used for the pan and tilt mobile phone holder. Each shield has its pros and cons but ultimately we chose to go with the Pololu VNH 5019 because it can handle the load of the DC motors that we plan to use. It is necessary for us to keep the motors that are presently on the Pathfinder because they can handle the heavy weight of the chassis and solar panels. In order to solve the pin issue associated with the Pololu VNH 5019 we plan to use a MCP23017 – i2c input/output port expander. This port expander will give us an additional 16 pins. Our design will use 3 Pololu VHH 5019 motor shields stacked on each other to drive 6 motors. We will also be able to utilize the built in current sensors in order to stop our motors under no load conditions.