3DoT Chassis

Antenna Matching
Written by Zachary de Bruyn (Electronics & Control) Table of Contents Purpose The PeteBot chassis team is unique in that it is utilizing two PCBs which operate on two different MCUs; the first being the heritage 3DoT v5.03 board which uses the ATMega32U4, and the second being the SAMB11, which incorporates the ATSAMB11. One significant different […]

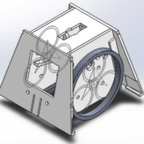
Gear Studies
Written by Railan Oviedo (Manufacturing) Objective For the Pete-Bot’s (P-Bot) method of movement, our project has implemented a planetary gear system that incorporates the incline gear as the wheel and 3 planetary gears. The top planetary gear will be the driving gear that is connected to the GM6 motor, while the other two planetary gears […]

PeteBot Requirements
(Written by Elizabeth Nguyen (Project Manager) & Melwin Pakpahan (Missions, Systems, & Test) Table of Contents Objective The requirements for the PeteBot (3DoT Chassis) are defined at two levels and provide the team with direction and to determine what shall be accomplished. Verification and validation are also outlined. Current Status: At this time, not all […]
Electronic Component BOM and Order: PeteBot
Written By: Muhannad Al Mohamed (E&C DM) Components The PeteBot(3DoT Chassis) uses electronic components listed in the figure below. These parts include the electronic parts that would be used in making the project’s costume PCB as well. This list needs to be updated to include the new color sensor with its related components. As seen […]

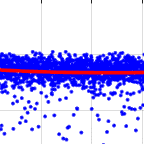
Testing of the TCS34725 (Trade-off study)
Written by Zachary de Bruyn Purpose The purpose of this experiment was to test the TCS34725 RBG Color-to-Digital sensor to determine if it was applicable for the purposes of the EE400D project “PeteBot”. The testing included testing of the sensitivity of the sensor, its ability to distinguish difference between colors, and performing studies as to […]
Current Draw of GM-6 Motors
Written by Zachary de Bruyn Purpose The purpose of this testing is to determine the amount of current the motors draw when supplies with a CR123 – 3.7 V battery. The motors were inserted into the “3DoT Chassis” and to simulate the amount of current the motors draw when supplied with a load; in this […]
Pete-Bot – Measuring Power Consumption
Written by Melwin Pakpahan (Mission, System, Test) Description: The power consumption of the 3DoT board will be measured as follows. A RCR123A battery will be connected in series with a test resistor and the 3DoT board. Two versions of the 3DoT board will be tested and compared. The test resistor is chosen to be 1 […]

Robot Avoidance Pseudocode
Written by Elizabeth Nguyen (Project Manager) Description: (updated on 11/19/17) The robot avoidance code is a program that will allow robots to avoid each other under various cases after a robot detects another. There currently two parts: (1) Robot Detection (written by John Campo) and (2) Robot Avoidance. The psuedocode outlines a potential algorithm that can be […]

Pete-Bot Custom Command and Telemetry
Written by Elizabeth Nguyen (Project Manager) Description: A short list of custom commands and custom telemetry are defined in preparation for the EE 400D Fall 2017 Mission. Custom Commands Adjustable Speed Commands – Allows the robot to run at a specific set speed Option for slowest speed Option for medium speed Option for fastest speed […]

Mission Definition
Written by Elizabeth Nguyen (Project Manager) Table of Contents Objective: The total time for each phase of the mission set is determined in order to ensure there is enough time allocated for the entire mission set to be completed in 120 min. This document entails the breakdown of the mission set and how much time […]