3DoT Goliath
Goliath Spring 2018 – Fritzing Diagram
Written by Milton Ramirez (E&C Engineer) Verified by Ernie Trujillo (Project Manager) Approved by Miguel Garcia (Quality Assurance) Parts Pro Micro Motor driver Gyro Range-finder Multiplexer Bluetooth Color sensor Battery Description This a prototype of how we will connect the parts we are going to use, but some of these parts might not […]

Goliath Spring 2018 – Planning and Scheduling
By: Ernie Trujillo (Project Manager) Approved By: Miguel Garcia (Quality Assurance) Table of Contents Introduction To achieve mission success for the Goliath Tank, a Gantt Chart was created by the Project Manager; the chart depicts all the pertinent tasks that need to be completed before attempting the mission through the maze. With the Gantt Chart, […]
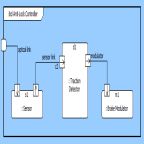
Goliath Spring 2018 – System Block Diagram
By: Ryan Nguyen (MST Engineer) Verified By: Ernie Trujillo (Project Manager) Approved By: Miguel Garcia (Quality Assurance) System Block Diagram The system block diagram illustrates how components of the Goliath communicate and connect with each other; from the control panel that uses Wi-Fi to talk with the mobile app to the wheels and treads. More […]

Goliath Spring 2018 – Preliminary Budget
By: Ernie Trujillo (Project Manager) Approved By: Miguel Garcia (Quality Assurance) Introduction The customer allotted $200 towards the Goliath Tank project. At this moment, the total expenditure of the project cannot be confirmed as the cost for the PCB and the 3D prints designs are unknown. Also, since the definitions of the maze are not […]
Goliath Fall 2017 – Final Blog Post
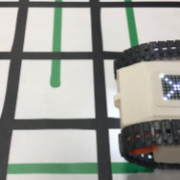
The goal of this project was to improve on 302 Goliath tank design from the Fall 2016 Class and adapt to a completely different mission goal. The mission was to navigate a 2D paper/cloth maze under remote control and then have the Goliath repeat the route autonomously. For an added challenge an extra version was added that where all bots […]
Goliath Fall 2017 – Final Print Model
Overall the design changes made to improve the ratio were successful, the execution was where I ran into the problems mentioned in a previous post [1]. The added cut outs for the LED display and the i/o port worked as expected. The IR sensor was not used in the mission. An improvement on that cut […]
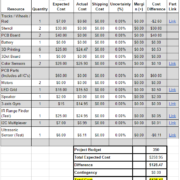
Goliath Fall 2017 – Final Budget and Expenses
This post is in accordance with the project requirement L1.11, “Budget”. In comparison to both the total expected cost and actual cost column, we could see which resources were supplied, cut, or purchased.A good portion of the components was covered through the use of previous semesters’ components specifically the: motor, 3dot board, and battery. The […]


Goliath Fall 2017 – Goliath Arduino Code & Calibration
The purpose of this post is to link to the final Goliath code and explain the overall structure for future use. Secondly, to explain how the code needs to be updated and calibrated to a particular Goliath chassis. Overall, getting the Goliath code to work for this mission involved the creation of 16 files and over […]

Goliath Fall 2017 Verification and Test
Written by Nornubari Kanabolo MST DM Table of Contents Verification and Testing In order to verify and test the Goliath, the requirements needed to be updated. Updated requirements can be found in this blog post. Goliath testing is complete for the most part, but some tests still need to be done before 2pm on December 13th, 2017. The […]