3DoT Goliath

Goliath Fall 2017 – Gyro and LED Custom PCB
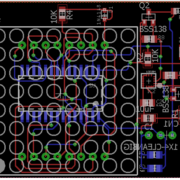
The custom printed circuit board was designed to include both the gyro sensor and the LED display on the top panel. The LED will display the direction the tank is taking within the maze. By working with my project and division manager the schematic and layout were created on Eagle CAD. The files were not […]

Goliath Fall 2017 – APP Setup and Remote Control User Guide
The goal of this guide is to provide setup for the custom commands needed on the Arxterra APP side in order to control the Goliath running the final code. Secondly, this guide will provide instructions on how to control the goliath correctly from the commands defined.

Goliath Fall 2017 – LED Grid Display
Based on our L1 requirements to have a LED display and the L2 sub-requirements to indicate the next turn direction, having an LED grid display was a stretch goal. After some (what turned out to be pretty simple work) the LED proves very useful in indicating to the user the intended direction when user input is […]

IR shield Fabrication and Test
IR shield Fabrication and Test Written by Charles Banuelos(Division Manager Design and Manufacturing) & Muhannad Al Mohamed(Division Manager E&C) Approved by Charles Banuelos(Division Manager Design and Manufacturing), Muhannad Al Mohamed(Division Manager E&C), Mark Huffman(Project Manager Goliath), Zach Oyog (E&C Sojourner) Fabrication Fabrication of the 3DoT IR shield occurred on 12/5/2017 due to the fact that Color […]
Goliath Fall 2017 – Post PDR Adjustments and 3D prints
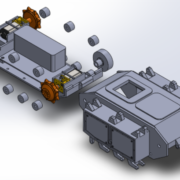
After taking a closer look at the IR sensor, I realized that the sensor needed to be relocated to avoid contact with the first motor. The distance between the top panel and the front motor is not large enough to fit the sensor. Although we did consider redesigning the top, the tank will lose its […]

Goliath Fall 2017 – Requirements Update
1. Project Schedule – Project shall be ready by Wednesday, December 13th, 2017 2. Operational Task – The Goliath will have the functionality to be connected remotely using Arxterra 3. Toy – Elements – The Goliath will behave like a toy 4. Driving Surface – The Goliath will be able to drive on flat surfaces 5. Driving Surface – The Goliath shall […]
Goliath Fall 2017 – Robot Detection
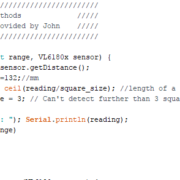
Detection is a subroutine used in the collusion protocol. The subfunction will employ an IR proximity sensor, VL6180. The distance outputted will be converted to a discrete value called squares which are dependent on the measured squares from the physical maze. Each side of the square is roughly 6.6 cms long meaning we have a […]

Goliath Fall 2017 – Mock-up Motor Test
The purpose of this post is to relay and archive the results the Mock-up Motor specific testing. The measured results are the speed and the current draw. The Goliath will use 2 micro motor gear. It is also subject to a weight load of about 190 grams. This experiment was tested on a carpet surface.

Color Sensor Shield: Fabrication, Integration, and Test
Approved By: Muhannad Al Mohamed, Charles Banuelos, Melwin Pakpahan Written By: Muhannad Al Mohamed Table of Contents Color Sensor Shield Parts and Design The parts used in the fabrication of each color sensor shields are the printed circuit board, electronic parts(two color sensors (BH1745NUC-E2), two LEDs (0603 package), two 150 Ohms resistors (0603 package), one […]