Mod Wheels Generation #1

Read from EEPROM
By: Matt Shellhammer (Electronics & Control Engineer) Approved by: Lucas Gutierrez (Project Manager) Table of Contents Introduction When in play back mode the robots will be reading data that was previously stored in EEPROM while being controlled by the Arxterra App. What is being read from EEPROM is the direction that the robot was facing and […]

Write to EEPROM
By: Matt Shellhammer (Electronics & Control Engineer) Approved by: Lucas Gutierrez (Project Manager) Table of Contents Introduction When in RC mode the robots will be controlled to travel through the maze with the Arxterra App through Bluetooth wireless communications. The robots are then required to memorize the path traveled and then repeat this path in […]

With Command MOVE Override for maze navigation
By: Matt Shellhammer (Electronics & Control Engineer) Approved by: Lucas Gutierrez (Project Manager) Introduction To use the Arxterra App to control the robots at The Robot Company, custom commands to override the MOVE command have to be defined. These custom commands will be defined to be used with the Arxterra App’s D-pad while the robots […]

Requirement Change Document
By: Andrew Yi (Mission, System, & Test Engineer) Approved by: Lucas Gutierrez (Project Manager) Legend: BLUE (keep as is), RED (changes made), PURPLE (new changes) Level 2 Requirements: L1-1 ModWheels shall be completed by Wednesday, December 13th, 2017. L1-2 ModWheels will be a toy robot. L1-3 ModWheels shall cost no more than $200. L1-4 ModWheels […]

EE346/EE444 Software Translation to EE400D
By: Matt Shellhammer (Electronics & Control Engineer for ModWheels) & Mark Huffman (Project Manager for Goliath) Approved by: Lucas Gutierrez (Project Manager for ModWheels) Table of Contents Introduction This software is simply an outline and requires modification for each project. The software translation is to ease the implementation of your projects specific software such as turning, […]

ModWheels C-clamps versus nut capture
By: Vanessa Enriquez (Design & Manufacturing Engineer for Goliath) Approved by: Lucas Gutierrez (Project Manager for ModWheels) Initial design After printing the first design, the customer asked to introduce another way to assemble the toy and suggested nut captures. The first design uses the c-clamps, which have been successfully implemented in previous models. The model shown below was […]

ModWheels 3DoT v 5.03 Integration and Test
By: Lucas Gutierrez (Project Manager) & Matt Shellhammer (Electronics & Control Engineer) 12/12/2017 As of Tuesday, December 12th, 2017, ModWheels does not have an operational v. 5.03 3DoT. ModWheels was given a v. 5.03 on Monday, December 11th, 2017 without a Bluetooth module (HM-11) or a battery holder. After soldering the HM-11 and battery holder, […]

ModWheels Custom Command and Telemetry
By: Lucas Gutierrez (Project Manager) Discussion An important aspect in fulfilling ModWheel’s mission requirements is integration with the Arxterra platform, both with the phone application and web based application. To tailor and customize the user experience of the Arxterra applications to the ModWheels project, a few custom commands and telemetry will be incorporated. ModWheels would have implemented […]
ModWheels Power Budget
By: Andrew Yi (Mission, Systems, & Test Engineer) Approved By: Lucas Gutierrez (Project Manager) Introduction The 3DoT Board is comprised of key components that each draw current from the battery. The boost receives input from the battery directly, and in turn provides power to the LDO. The power report has been updated per the Division […]
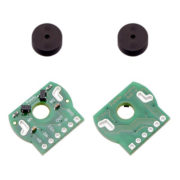
Encoder Trade-Off Study
By: Matt Shellhammer (Electronics & Control Engineer) With collaboration by: Zach Oyog (Electronics & Control Engineer of Sojourner) Approved by: Lucas Gutierrez (Project Manager) Table of Contents Introduction In the effort to find an effective set of encoders to use on the ModWheels cars and to strengthen the synergy between ModWheels and Sojourner a trade-off study was performed. […]