
Fall 2016 BiPed : Preliminary Project Plan
Gifty Sackey (Project Manager) Brandon Perez (Systems Engineer) Ryan Daly (Electronics and Controls Engineer) Ijya Karki (Manufacturing Engineer) Table of Contents Work Breakdown Structure Gifty Sackey (Project Manager) The Work Breakdown Structure (WBS) diagram, shows the responsibilities of each BiPed group member. A top level view of the job requirements can able to found in […]

Spring 2016 RoFi: Project Summary
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Table of Contents Executive Summary Program Objectives & Mission Profile By Christopher Andelin (Project Manager) RoFi is the fifth prototype from Project Biped. It is a self-contained, bipedal robot that uses accelerometer […]

Spring 2016 RoFi: Research and Implementation of the Accelerometer/Gyroscope
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Research and Implementation of the Accelerometer/Gyroscope By Henry Ruff (Electronics and Controls Engineer) Note: All files referenced without additional links can be found in the RoFi Spring 2016 Google Drive, https://drive.google.com/drive/folders/0B_v74PMhdCbKSXVPQ285ekZEX28. RoFi’s movement […]

Spring 2016 RoFi: Mechanical Design Rev. 3
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Table of Contents Final RoFi 3D Modeling Qui Du (Manufacturing Engineer) Introduction In Mechanical Design Rev2, https://www.arxterra.com/spring-2016-rofi-mechanical-design-rev-2/ RoFi’s head contains both the PCB and Arduino Mega. I redesign the head to contain the […]
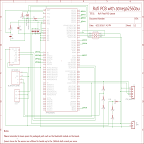
Spring 2016 RoFi: Finalized Fritzing Diagram, PCB Design, Alternative Arduinos, and Custom Eagle Components
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Table of Contents Finalized Fritzing Diagram By Andrew Laqui (Electronics and Controls Engineer) The Fritzing software, found here , allowsa physical breadboard design to be created digitally. By designing a digital […]
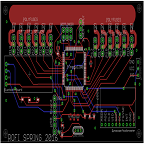
Spring 2016 RoFi: PCB Layout
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Table of Contents PCB Layout Qui Du (Manufacturing Engineer) Once I received the PCB schematic from the Electronics and Controls Engineers, I create the PCB layout. First, I clicked on the Generate/Switch to […]

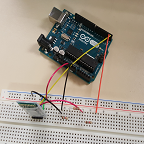
Spring 2016 RoFi: Bluetooth Verification Test
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Bluetooth Verification Test Mario Ramirez (Systems Engineer) Test Objective To verify that a Bluetooth module, HC-06 and a cell phone are able to communicate within a distance of 10 feet +/- 0.5 feet. […]
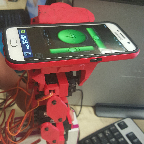
Spring 2016 RoFi: Bluetooth Communication
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Bluetooth Communication Mario Ramirez (Systems Engineer) To meet requirement 1.8, RoFi must communicate with the Arxrobot App and have an on and off state using the users phone. Begin your Bluetooth […]
Spring 2016 RoFi: Calibration
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Calibration Mario Ramirez (Systems Engineer) Introduction Before attempting to walk with RoFi, a calibration test must be done. Using Robot Poser, Jonathan’s instructions and the calibration file (located below), perform the […]

Spring 2016 RoFi: Feet Material Verification Test
Christopher Andelin (Project Manager) Mario Ramirez (Systems Engineer) Qui Du (Manufacturing Engineer) Andrew Laqui (Electronics and Controls Engineer) Henry Ruff (Electronics and Controls Engineer) Table of Contents Feet Material Verification Test Mario Ramirez (Systems Engineer) Requirement Nonslip material on the bottom of RoFi’s feet shall have a friction coefficient of 0.9 +/- 0.05. Test Objective […]