Requirements
Requirements: Level 1 The μBiPed must be finished by the 8th of May, 2015 to correspond with the duration of the EE 400D class. Verification: http://csulb.edu/divisions/aa/calendars/documents/2014-2015_academic_calendar_updated.pdf The μBiPed must move (i.e. walk in a human-like fashion) up an incline that starts initially at 8° and then decreases to a 6° slope in relation to level […]

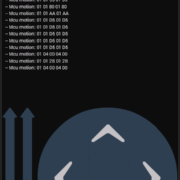
Reduction of Dynamic Memory Usage
By: Tate McGeary As stated in a previous blog, one of the immediate issues that was evident was the lack of resources on the smaller micro-controllers. The micro-controller that was chosen the Arduino Micro has the following resources: 32 kb of flash (4kb for the bootloader): 28 kb flash available for programming 2.5 kb of SRAM […]
Immediate issues Micro-controllers and Choice.
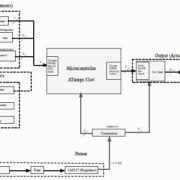
By: Tate McGeary One of the immediate issues with the Micro BiPed showed itself in the code and micro-controller. When researching the micro-controller, it became evident that the smaller micro-controllers do not have enough memory. The program at minimum required 14kb of flash memory and 5kb+ of dynamic memory (SRAM). In order to compensate for […]
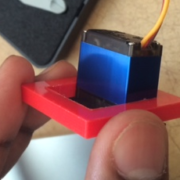
Micro BiPed Introduction
Mission Objective: The project mission is inspired by the BiPed designed by Jonathan Dowdall of Project Biped, completed in previous semesters of EE 400D. The goal is to scale down the BiPed design by changing standard servos to micro servos to yield the μBiPed, which will result in design changes to the robot. The robot […]