Spring 2014 Biped Final Thoughts
By Kevin Huynh, Project Manager Tasks Complete: Alternative movement code to the one provided by projectbiped and robot poser. Alternate code includes statically stable forward walk, left turn, right turn, and obstacle avoidance code. Remote control of ROFIA through Arxterra. ROFIA can be commanded to stand up straight, walk forward, turn left, and turn right. Servo overcurrent […]
Simple control of Arduino using Arxterra
By Vinh-Khoa Ton, Control and Image Processing The purpose of this experiment is to access the Arxterra control panel and to operate an Arduino board using the Microbridge connection through an Android phone. For information about the Microbridge connection between Android and Arduino, please visit this blog post: https://www.arxterra.com/simple-control-of-an-arduino using-an Android-phone/ A quick demonstration: https://www.youtube.com/watch?v=D_rMULcm6uc&feature=youtu.be How to […]
Biped Movement Codes
By Kevin Huynh, Project Manager / Computer Systems and Software Objective: This blog will focus on the ideas behind how the code from projectbiped and the code from Spring 2014 handle the animation playback for walking and turning. It will also go into the reason for the switch. ProjectBiped Code : The most recent code can be […]
Simple Control of an Arduino using an Android Phone
By Vinh-Khoa Ton, Control and Image Processing The purpose of experiment is to become familiar with the way an Android phone communicates with an Arduino board using MicroBridge, an Android Debug Bridge (ADB) implementation for microcontrollers. [Insert Android-Arduino.jpeg] How it works: The ADB protocol can either create a new shell or use the existing shell […]

Polyfuse Testing and Implementation
By Kevin Huynh, Project Manager / Computer Systems and Software Objective: The first test will verify whether or not the servos used will be protected from drawing too much current when they stall. The current level that will be considered dangerous for the Power HD 1501MG servo is the stall current listed in the datasheet (2.3 A […]

Servo Protection Methods Trade-off Study
By Kevin Huynh, Project Manager / Computer Systems and Software Objective: For Spring 2014, one of the requirements for the biped is to add in some form of servo overcurrent protection. The goal of this is to prevent the servos from drawing too much current, overheating, and destroying the control circuit boards inside of the case. A […]
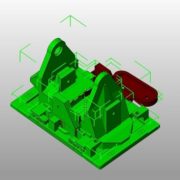
Obtain and repair STL files
By Vinh-Khoa Ton, Control and Image Processing Purpose of this process: After obtaining the STL files for all ROFI parts, we needed a way to create a “clean” version of the modulated STL files. The purpose of this process was to eliminate all holes, gaps, and unclosed surfaces on the parts to ensure the quality of the […]

Ultrasonic Sensor Examination
By Vinh-Khoa Ton, Control and Image Processing The purpose of this ultrasonic sensor examination was to determine the range and angle of the sensor detection. The ultrasonic sensor will be used as the eyes of ROFI and ROFIA for the purpose of avoiding obstacles. The Seeed Studio Ultrasonic Ranger v1.0 was the device chosen for this examination. […]
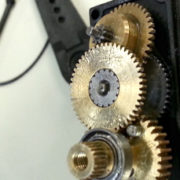
Servo Examination
By Kevin Huynh, Project Manager / Computer Systems and Software The purpose of this servo examination was to discern the reason for the servos malfunctioning. During the servo testing, it was discovered that three Power HD 1501MG servos were broken and the broken servos were closer to the feet of the robot, suggesting that the load was […]

Servo Functionality Test
By Elaine Doan, Systems and Test Engineering Servo Functionality Testing The objectives of this test were to verify that ROFI’s servos were working correctly. There are two servos that the CSULB Biped group is concerned with: the Towerpro MG996R servo and the Power HD 1501MG servo. These two servos were used in both ROFI and ROFIA, with […]