Velociraptor (W)
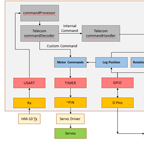
Fall 2016 Velociraptor (W): Software Block Diagram
By Gifty Sackey (Mission, Systems, and Test) Approved by: – Lam Nguyen (Project Manager) – James Lee (Division Manager for Mission, System, and Test) Table of Contents Introduction The purpose of this blog post is to discuss and summarize the control functions that will be required in the programming of the robot. It will cover […]

Fall 2016 Velociraptor (W): Validation and Verification Test Plan
By: – Lam Nguyen (Project Manager – Velociraptor Wednesday) – Paul Ahumada (Project Manager – Velociraptor Thursday) – Gifty Sackey (Mission, System, and Test Engineer) Introduction The final validation and verification test plan was written to verify the requirements for the Velociraptor through the Validation and Verification Matrix. Link: verification-and-validation-matrix Verification & Validation Test Plan Below are the […]
Fall 2016 Velociraptor (W): Center of Mass
By Aaron Choi (Manufacturing Engineer) Approved by -Lam Nguyen (Project Manager) -Tim Haddadian (Division Manager for Manufacturing) Table of Contents Requirements Level 2-10 The center of gravity on the axis of the head and tail shall be controlled by one servo while being placed over the foot Introduction The center of mass is crucial for […]

Fall 2016 Velociraptor (W): Control Algorithm Code #2
By: Taylor Farr (Electronics and Controls) Approved by: – Lam Nguyen (Project Manager) – Ryan Daly (Division Manager for Electronics and Control) Table of Contents Summary The code for CDR utilizes IR sensors as rotary encoders. This was an okay method because it allowed for us to move the DC motors exactly 180 degrees. This is method […]

Fall 2016 Velociraptor (W): Hardware Design
By Aaron Choi (Manufacturing Engineer) Approved by -Lam Nguyen (Project Manager) -Tim Haddadian (Division Manager for Manufacturing ) Table of Contents Requirements Level 1-2 requirement states that the Velociraptor budget shall not cost more than $102. Level 2-1 The center of gravity on axis of legs shall be controlled by one servo. The head and tail […]
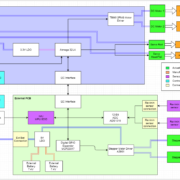
Fall 2016 Velociraptor (W): System Block Diagram
By: Gifty Sackey (Mission, System and Test Engineer) Approved by: – Lam Nguyen (Project Manager) – James Lee (Division Manager for Mission, System and Test) Table of Contents Introduction The system block diagram describes how all the signals connect to all the components and communicate with the 3DoT board. Aside from the 3DoT board, which […]
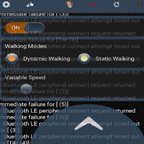
Fall 2016 Velociraptor (W): Custom Telemetry Commands
By: Gifty Sackey (Mission, System, and Test Engineer) Approved by: – Lam Nguyen (Project Manager) – James Lee (Division Manager for Mission, System, and Test) Table of Contents Introduction Inaddition to the custom command for static walking that was created for the Velociraptor (W) group, we also created four additional custom telemetry commands. For the […]
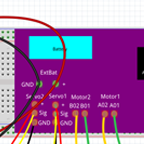
Fall 2016 Velociraptor (W): Fritzing Diagram
By: Taylor Farr (Electronics and Controls) Approved By: – Lam Nguyen (Project Manager) – Ryan Daly (Division Manager for Electronics & Controls) Table of Contents Requirements The velociraptor shall utilize a printable circuit board (PCB). The velociraptor shall use a 3DoT board library and utilize I2C to communicate with sensors, A/D converter, and GPIO. Introduction In […]
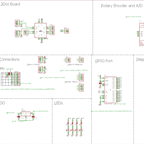
Fall 2016 Velociraptor: EagleCAD schematic
By Taylor Farr (Electronics and Control) Approved By: – Lam Nguyen (Project Manager) – Ryan Daly (Division Manager for Electronics and Control) Table of Contents Requirements L1 – 9: The velociraptor shall utilize a printable circuit board (PCB). L1 – 10: The velociraptor shall use a 3DoT board library and utilize I2C to communicate with sensors, […]

Fall 2016 Velociraptor (W): Mass and Power Report
By Gifty Sackey (Mission, System, Test Engineer) Approved by: Lam Nguyen (Project Manager) Table of Contents Mass Report The mass of the Wednesday Velociraptor was 348 grams. As part of the level two requirements, the mass of the robot should not be greater than 350 grams. The mass of the robot was an important thing […]